一种基于全景影像的慢行交通评估方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及智能交通系统技术领域,特别是涉及一种基于全景影像的慢行交通评估方法。
背景技术
步行与自行车出行是绝大多数中小城市最普遍的出行方式,21世纪初慢行交通的概念引入国内。虽部分中小城市已编制慢行交通规划,但到目前为止慢行者仍处于基本安全缺乏保障阶段。在中小城市慢行出行仍面临出行基数大、问题多、规划不到位的难题。随着机动化交通带来的问题日趋严重,上海、武汉、杭州等城市陆续开展了慢行交通系统规划,由此也促进了慢行交通系统的理论研究。由于我国慢行交通的研究尚处于初级阶段,目前主要集中在系统规划策略及规划方法层面,缺乏一套系统的评价标准。
在数据采集方面,因传统的数据采集依靠问卷调研与测量等手段,采集效率低,实时性差,采集数据较为粗略,仅能反映一定情况。但是,随着高质量慢行交通的发展以及大数据、深度学习算法的出现,使建成环境与慢行交通数据容易获取,以“”
因此,亟需设计一种新的基于全景影像的慢行交通评估方法,其可兼顾评估或估算的精度和效率,同时有助于全面、一致地对区域内不同地区的区域交通可达性进行对比评估或研究,帮助做出更好的公共决策。构建“以人为本”的慢行空间,支撑人行道净化行动。
发明内容
本发明要解决的技术问题是为了克服现有技术缺乏,能够兼顾精度和效率,同时能够针对区域慢行交通可达性进行评估或研究的系统性方法的缺陷,提出一种新的基于全景影像的慢行交通评估方法。
本发明是通过采用下述技术方案来解决上述技术问题的:
本发明提供了一种基于全景影像的慢行交通评估方法,其中研究的区域存在多个集中区比如城市和城镇,其特点在于,所述评估方法包括:
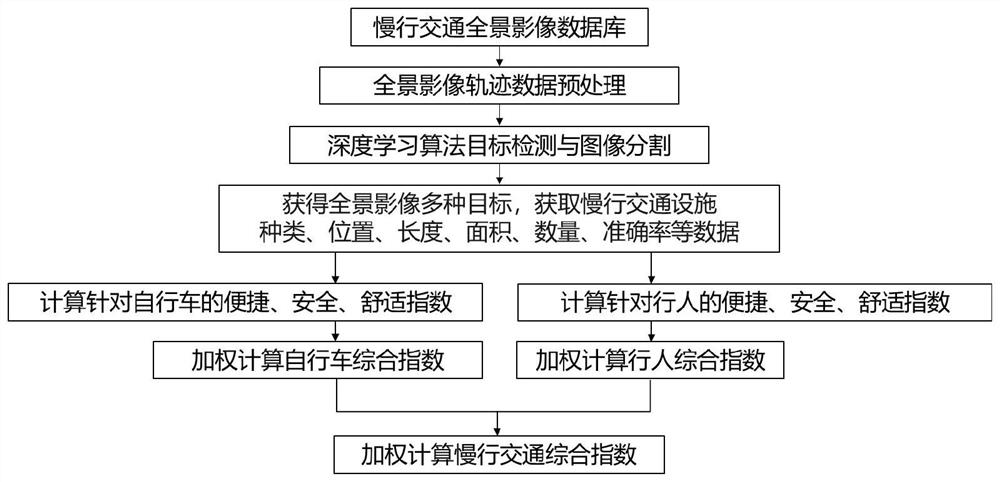
步骤一、对慢行交通全景影像轨迹数据进行预处理;
步骤二、通过深度学习算法实现慢行交通全景影像的目标检测和图像分割;
步骤三、获得慢行交通全景影像多种目标,获取慢行交通设施种类、位置、长度、面积、数量、准确率等数据;
步骤四、针对自行车和行人分别计算便捷、安全、舒适指数;
步骤五、针对自行车和行人分别加权计算综合指数;
步骤六、根据S5、S6中计算出的自行车和行人便捷、安全、舒适指数加权计算慢行交通综合指数,对城市慢行交通设施设计建设与改造进行优化调整,改善城市交通。
在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
本发明的积极进步效果在于:
根据本发明的基于全景影像的慢行交通评估方法,其可兼顾评估或估算的精度和计算效率,能够有助于高效、全面、一致地对区域内不同地区的区域慢行交通环境进行对比评估或研究,帮助做出更好的公共决策,例如,帮助综合考虑慢行交通设施的衔接并发现改善区域慢行交通环境的可行途径等。因此,在区域交通、国土空间以及城市慢行交通等规划和管理中具有广泛的应用前景。
附图说明
图1为根据本发明优选实施例的基于全景影像的慢行交通评估方法的流程示意图。
具体实施方式
下面结合说明书附图,进一步对本发明的优选实施例进行详细描述,以下的描述为示例性的,并非对本发明的限制,任何的其他类似情形也都将落入本发明的保护范围之中。
在以下的具体描述中,方向性的术语,例如“左”、“右”、“上”、“下”、“前”、“后”等,参考附图中描述的方向使用。本发明各实施例中的部件可被置于多种不同的方向,方向性的术语是用于示例的目的而非限制性的。
为便于理解下文对于例举的本发明的实施方式的说明和描述,现对于下文涉及的术语、变量做定义或说明如下,其中部分变量的定义仅出于便于理解下文说明中涉及的公式。并且,应当理解的是,下述定义或说明应做说明性而非限制性的理解。
一种基于全景影像的慢行交通评价方法,其特征在于,包括以下步骤:
S1、对慢行交通全景影像轨迹数据进行预处理;
S2、通过深度学习算法实现慢行交通全景影像的目标检测和图像分割;
S3、获得慢行交通全景影像多种目标,获取慢行交通设施种类、位置、长度、面积、数量、准确率等数据;
S4、针对自行车和行人分别计算便捷、安全、舒适指数;
S5、针对自行车和行人分别加权计算综合指数;
S6、根据S5、S6中计算出的自行车和行人便捷、安全、舒适指数加权计算慢行交通综合指数,对城市慢行交通设施设计建设与改造进行优化调整,改善城市交通。
所述步骤S1中,所述行驶状态参数是利用全景影像轨迹数据,结合坐标系转换法对全景影像进行行驶轨迹重构,即将WGS-84坐标系下的全景影像GPS经纬度转化为笛卡尔平面坐标,由此计算出该路段一个统计周期内每个定位点上全景影像的瞬时速度和瞬时加速度,其中,瞬时速度已包含在GPS回传数据中,瞬时加速度为瞬时速度差与时间差的比值。
所述步骤S2中,通过深度学习算法实现慢行交通全景影像的目标检测和图像分割,图像输入到训练好的yolo和SegNet框架中实现检测。
所述步骤S4中,针对自行车和行人分别计算便捷、安全、舒适指数,所述自行车便捷指数综合了地面过街中未设标线占比和过街设施平均间距,自行车便捷指数计算公式如下:
y
其中,y
自行车安全指数综合了铺装平整度、占道比例、自行车道隔离形式占比和通道饱和度,自行车安全指数计算公式如下:
y
y
y
y
其中,y
自行车舒适指数综合了自行车道宽度、自行车停车设施占比、自行车道遮荫率和路面坡度,自行车舒适指数计算公式如下:
y
y
y
其中,y
所述步骤S4中行人便捷指数综合了人行道间断率、地面过街中未设标线占比、简洁度、过街设施平均间距、人行横道设施占总过街比和无障碍设施占比,行人便捷指数计算公式如下:
y
y
y
y
y
其中,y
行人安全指数综合了过街设施阻车桩占比、占道比例、中央岛设置占比、通道饱和度、路口指示标识占比、慢行通道指示标识清晰度和铺装平整度,行人安全指数计算公式如下:
y
y
y
y
y
y
其中,y
行人舒适指数综合了宽度、遮荫率、建筑贴线率、底商密度、路侧建筑距离和休憩设施占比,行人舒适指数计算公式如下:
y
y
y
y
y
其中,y
所述步骤S5中,自行车指数基于自行车便捷指数、自行车安全指数和自行车舒适指数,自行车指数计算公式如下:
其中,自行车便捷指数占比权重为0.15,自行车安全指数占比权重为0.2,自行车舒适指数占比权重为0.15。
所述步骤S5中,行人指数基于行人便捷指数、行人安全指数和行人舒适指数,行人指数计算公式如下:
其中,行人便捷指数占比权重为0.15,行人安全指数占比权重为0.2,行人舒适指数占比权重为0.15。
所述步骤S6中,慢行交通指数基于自行车指数和行人指数,慢行交通指数计算公式如下:
Index
- 一种基于全景影像的慢行交通评估方法
- 一种基于时空管道建模的全景视频客观质量评估方法