一种农业物联网植物生长监控装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及农业物联网技术领域,更具体地说,涉及一种农业物联网植物生长监控装置。
背景技术
用现代信息技术改造传统农业、装备农业是实现农业现代化的重要途径,物联网技术是现代信息技术的新生力量,是推动信息化与农业现代化融合的重要切入点,也是推动我国农业向“高产、优质、高效、生态、安全”发展的重要驱动力,农业物联网技术集成先进传感器、无线通讯和网络、辅助决策支持与自动控制等高新技术,可以实现对农业资源环境、动植物生长等的实时监测。
现有技术CN209540401U一种农业物联网植物生长监控装置中,通过设置转动电机,转动电机带动两组从动齿轮转动,进而带动转动杆和两组摄像头转动,且由于两组从动齿轮位于转动电机的两侧,所以使两组摄像头能够沿相反方向转动,进而使两组摄像头能够同时监控不同的角度,但是该装置还存在不足之处在于,该装置在使用过程中,由于现有直接暴露在室外的农作物在生长过程中,而该装置只能够对农作物进行监控,不便于起到驱赶警报的作用,而作物往往会受到鸟类及其他的大型的动物例如野猪与猪獾等动物的侵害,对未成熟或者成熟还未采摘的农作物进行毁害,导致产量的降低,同时,现有装置不具备防盗功能,给农民造成经济上的损失;此外,现有的农田驱逐装置中,假人的驱逐运动具有很强的规律性(例如假人手臂挥动、前倾等),使得鸟类或小动物对假人产生适应性,从而失去恐吓作用。鉴于此,我们提出一种农业物联网植物生长监控装置。
发明内容
1.要解决的技术问题
本发明的目的在于提供一种农业物联网植物生长监控装置,以解决上述背景技术中提出的问题。
2.技术方案
一种农业物联网植物生长监控装置,包括固定杆,所述固定杆上端前侧底面安装有摄像头,所述固定杆顶面设有人体模型,所述人体模型上端前壁设有驱赶组件,所述人体模型前壁左右对称设有两个手臂模型,所述人体模型前侧中部设有传动组件,所述人体模型中部贯穿设有转轴,所述转轴前端外壁穿过人体模型后壁延伸至前部并套接有不规则调节板,所述转轴后端外壁套设有锥齿轮A,所述锥齿轮A后侧设有皮带轮B,所述转轴后端下方设有电机,所述人体模型下端后侧设有调节组件,所述手臂模型靠近人体模型的一侧设置有磁性区域,所述人体模型内设置有多个电磁铁,所述多个电磁铁对称分布在所述手臂模型的两侧,所述人体模型表面设置有控制器,所述多个电磁铁均与所述控制器连接,所述控制器内设置有随机数生成模块,所述多个电磁铁中的每个电磁铁均与一固定编号相关联。
优选地,所述人体模型底面转动连接有固定板,所述固定板顶面靠近外圆处呈环型结构开设有多个啮合齿,所述固定板底面与固定杆顶面连接固定,所述人体模型上端前壁开设有滑槽。
优选地,所述驱赶组件包括固定架,所述固定架顶面贯穿设有敲击锤,所述敲击锤上方设有铃铛,所述铃铛后壁与人体模型上端前壁连接固定,所述敲击锤上端外壁与铃铛外壁活动接触。
优选地,所述传动组件包括T型杆,所述T型杆上端左右两端均焊接有齿条,所述T型杆中部后壁焊接有T型块,所述T型块后端外壁与滑槽内壁滑动配合,所述T型块顶面通过弹簧与滑槽上端内壁连接固定,所述T型杆下端前壁焊接有接触杆,所述接触杆外壁与不规则调节板外壁滑动接触,所述T型杆顶面与敲击锤下端活动接触。
优选地,所述手臂模型上端通过销轴与人体模型上端前壁转动连接,所述手臂模型上端外壁呈弧型结构焊接有多个传动齿,所述传动齿与齿条啮合传动。
优选地,所述调节组件包括转动杆,所述转动杆前端与人体模型后端下壁转动连接,所述转动杆中部外壁套设有皮带轮A,所述皮带轮A通过皮带与皮带轮B摩擦传动,所述转动杆后端外壁套接有齿轮,所述齿轮与啮合齿啮合传动。
优选地,所述电机通过电机座与人体模型后壁连接固定,所述电机输出端外壁穿过电机座底面延伸至上部并套接有锥齿轮B,所述锥齿轮B与锥齿轮A啮合传动。
3.有益效果
相比于现有技术,本发明的优点在于:
1、通过设置人体模型,当利用摄像头观测到有鸟类等动物或者有人进行偷盗农作物时,可以利用电机带动锥齿轮B转动,使得锥齿轮B带动啮合的锥齿轮A转动,从而使得转轴带动连接的不规则调节板进行转动,使得不规则调节板会带动T型杆上的接触杆移动,使得T型杆在T型块的作用下上下移动,当T型杆向下移动时,会带动连接的齿条向下移动,从而使得齿条带动焊接有传动齿的手臂模型进行转动,使得手臂模型会进行上下往复的挥动,模仿人类进行驱赶,避免农作物被损害。
2、通过设置驱赶组件,当不规则调节板转动时,由于T型块连接有弹簧,接触杆从与不规则调节板的弧型外壁向竖直外壁移动时,弹簧会将T型块快速的向上拉起,从而使得T型杆顶面与敲击锤的下端接触,使得敲击锤快速的敲击在铃铛上,产生较大的声音,使得驱赶更加有效果,避免了动物及不法分子对种植的农作物造成破坏,大大的提高了对农作物的保护性。
3、通过设置调节组件,当转轴转动时,会带动皮带轮B转动,使得皮带轮B通过皮带带动皮带轮A转动,从而带动转动杆上的齿轮转动,由于齿轮与固定板上的啮合齿啮合,由于人体模型与固定板转动连接,当齿轮转动时,会带动人体模型进行转动,使得铃铛发出的声音可以更大范围的进行传播,使得驱赶效果进一步提高。
附图说明
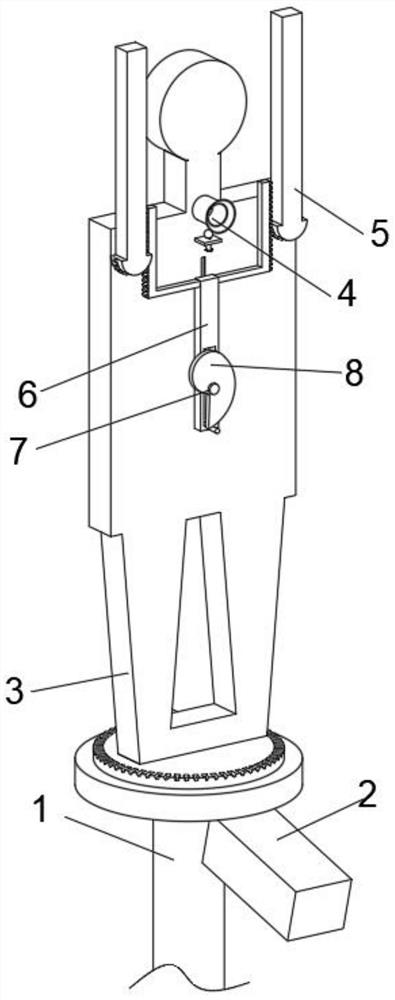
图1为本发明的整体结构前侧示意图;
图2为本发明的固定杆上方结构前侧使用时示意图;
图3为本发明的固定杆上方结构后侧示意图;
图4为本发明的人体模型及驱赶组件结构前侧示意图;
图5为本发明的传动组件及转轴上的结构左侧展开示意图;
图6为本发明的调节组件结构左侧示意图。
图中标号说明:1、固定杆;2、摄像头;3、人体模型;4、驱赶组件;5、手臂模型;6、传动组件;7、转轴;8、不规则调节板;9、锥齿轮A;10、电机;11、调节组件;12、皮带轮B;301、固定板;302、啮合齿;303、滑槽;401、固定架;402、敲击锤;403、铃铛;601、T型杆;602、齿条;603、T型块;604、弹簧;605、接触杆;501、传动齿;1101、转动杆;1102、皮带轮A;1103、皮带;1104、齿轮;1001、锥齿轮B。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
请参阅1-6图,本发明提供一种技术方案:
一种农业物联网植物生长监控装置,包括固定杆1,固定杆1上端前侧底面安装有摄像头2,固定杆1顶面设有人体模型3,人体模型3上端前壁设有驱赶组件4,人体模型3前壁左右对称设有两个手臂模型5,人体模型3前侧中部设有传动组件6,人体模型3中部贯穿设有转轴7,转轴7前端外壁穿过人体模型3后壁延伸至前部并套接有不规则调节板8,转轴7后端外壁套设有锥齿轮A 9,锥齿轮A 9后侧设有皮带轮B 12,转轴7后端下方设有电机10,人体模型3下端后侧设有调节组件11,摄像头2起到监控作用。
具体的,人体模型3底面转动连接有固定板301,固定板301顶面靠近外圆处呈环型结构开设有多个啮合齿302,固定板301底面与固定杆1顶面连接固定,人体模型3上端前壁开设有滑槽303,滑槽303起到限位的作用。
进一步的,驱赶组件4包括固定架401,固定架401顶面贯穿设有敲击锤402,敲击锤402上方设有铃铛403,铃铛403后壁与人体模型3上端前壁连接固定,敲击锤402上端外壁与铃铛403外壁活动接触,铃铛403起到发出声音进行驱赶。
再进一步的,传动组件6包括T型杆601,T型杆601上端左右两端均焊接有齿条602,T型杆601中部后壁焊接有T型块603,T型块603后端外壁与滑槽303内壁滑动配合,T型块603顶面通过弹簧604与滑槽303上端内壁连接固定,T型杆601下端前壁焊接有接触杆605,接触杆605外壁与不规则调节板8外壁滑动接触,T型杆601顶面与敲击锤402下端活动接触,齿条602起到带动手臂模型5转动的作用。
更进一步的,手臂模型5上端通过销轴与人体模型3上端前壁转动连接,手臂模型5上端外壁呈弧型结构焊接有多个传动齿501,传动齿501与齿条602啮合传动,手臂模型5起到挥动驱赶的作用。
进一步地,所述手臂模型5靠近人体模型3的一侧设置有磁性区域,所述人体模型3内设置有多个电磁铁,所述多个电磁铁对称分布在所述手臂模型5的两侧,所述人体模型3表面设置有控制器,所述多个电磁铁均与所述控制器连接,所述控制器内设置有随机数生成模块,所述多个电磁铁中的每个电磁铁均与一固定编号相关联,当在所设定的时间阈值内检测到鸟类出现的次数大于第一数量阈值时,通过所述随机数生成模块生成随机数,并将所述随机数与所述固定编号对应,该对应关系可以是例如设置所生成的随机数的数值区间,所述数值区间内的不同区间与不同的固定编号对应,并使所述固定编号所对应的电磁铁通电产生磁性,通过对不同位置的电磁铁通电从而对所述手臂模型5产生吸引,从而使得手臂模型5转动。由于每次通电的电磁铁具有随机性,使得手臂模型5的转动幅度和转动方向具有随机性,且两个手臂模型5的转动方向和转动幅度不必然相同,降低手臂模型5转动的规律性,从而避免鸟类或小动物对人体模型3产生适应性使得人体模型3失去震慑意义。
值得说明的是,调节组件11包括转动杆1101,转动杆1101前端与人体模型3后端下壁转动连接,转动杆1101中部外壁套设有皮带轮A 1102,皮带轮A 1102通过皮带1103与皮带轮B 12摩擦传动,转动杆1101后端外壁套接有齿轮1104,齿轮1104与啮合齿302啮合传动,调节组件11使得人体模型3可以转动。
除此之外,电机10通过电机座与人体模型3后壁连接固定,电机10输出端外壁穿过电机座底面延伸至上部并套接有锥齿轮B 1001,锥齿轮B 1001与锥齿轮A 9啮合传动,电机10起到驱动作用。
工作原理:当农作物种植,需要用到监控装置时,可以利用本装置进行,首先利用固定杆1将装置固定在农田旁,然后利用摄像头2进行监控,当利用摄像头2观测到有鸟类等动物或者有人进行偷盗农作物时,可以利用电机10带动锥齿轮B 1001转动,使得锥齿轮B1001带动啮合的锥齿轮A 9转动,从而使得转轴7带动连接的不规则调节板8进行转动,使得不规则调节板8会带动T型杆601上的接触杆605移动,使得T型杆601在T型块603的作用下上下移动,当T型杆601向下移动时,会带动连接的齿条602向下移动,从而使得齿条602带动焊接有传动齿501的手臂模型5进行转动,使得手臂模型5会进行上下往复的挥动,通过设置驱赶组件4,当不规则调节板8转动时,由于T型块603连接有弹簧604,使得接触杆605从与不规则调节板8的弧型外壁向竖直外壁移动时,弹簧604会将T型块603快速的向上拉起,从而使得T型杆601顶面与敲击锤402的下端接触,使得敲击锤402快速的敲击在铃铛403上,通过设置调节组件11,当转轴7转动时,会带动皮带轮B 12转动,使得皮带轮B 12通过皮带1103带动皮带轮A 1102转动,从而带动转动杆1101上的齿轮1104转动,由于齿轮1104与固定板301上的啮合齿302啮合,由于人体模型3与固定板301转动连接,当齿轮1104转动时,会带动人体模型3进行转动。此外,当摄像头2多次监测到鸟类或小动物时,通过随机数生成模块随机地对不同位置的电磁铁通电,从而使得手臂模型5的转动方向和转动幅度的规律性下降,避免鸟类或小动物产生适应性,提高驱逐效果。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种农业物联网植物生长监控装置
- 一种基于农业物联网的植物生长监控装置