一种基于混合A星的低速商用无人车路径规划算法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及自动驾驶领域,具体是一种基于混合A星的低速商用无人车路径规划算法。
背景技术
随着无人驾驶技术的蓬勃发展,无人驾驶技术在低速封闭区域、半开放道路的应用越来越成熟。其中无人驾驶技术主要包括环境感知、地图定位、规划决策、横纵控制。其中规划决策在整个无人驾驶技术中,是比较重要的环节,规划决策算法相当于是人的大脑,其中各项交通规则的限定都会体现在决策规划中,对于遇到的各种环境感知结果,进行车辆行为决策,因此高效、准确的建图方法尤为重要。
目前已知的路径规划算法分为全局路径规划算法与局部路径规划算法。传统的路径规划算法主要是迪杰斯特拉算法、A星算法、动态A星算法、混合A星算法等。在目前已知的路径规划算法中,多数情况是应用在小型机器人领域,但是在应用场景为与低速商用车的路径规划算法较少,需要能够满足车辆运动学模型的路径轨迹。目前应用于低速商用车领域的方法的计算任务量很大,实际应用起来难度较高,以目前的技术应用起来还存在较大的困难。
发明内容
本发明的目的在于提供一种基于混合A星的低速商用无人车路径规划算法,它能够实现高效准确的建图,生成满足车辆运动学模型的路径规划。
本发明为实现上述目的,通过以下技术方案实现:
一种基于混合A星的低速商用无人车路径规划算法,包括如下步骤:
S1、在激光雷达感知到障碍物后,输出障碍物根据相应坐标的位置,并根据惯导定位设备,确定车辆位置;
S2、根据惯导定位设备与激光雷达感知的障碍物位置,确定无人车后续的目标点位置;
S3、构建基于激光雷达与惯导定位设备的局部地图,并且设定边缘地图的权重,来配合混合A星算法的应用;
S4、利用混合A星算法,并设定车辆运动学参数,生成一条无碰撞的轨迹路线。
进一步的,利用激光雷达感知障碍物位置时,激光雷达分别装在车体的左前、左后、右前、右后的位置,所述激光雷达是机械式激光雷达,其探测范围为360°。
进一步的,障碍物坐标确认时,激光雷达感知到障碍物后,输出障碍物根据车体坐标的位置;当激光雷达没有感知到障碍物时,不输出障碍物位置,不提供障碍物相应坐标位置。
进一步的,车辆向左变道进行目标点位置确认时,根据惯导设备能够定位到自身位置,并且设定自身位置为起点位置,根据激光雷达感知到的障碍物位置在地图上进行障碍物标记;
结合真实场景,确定本车道中心线与相邻车道中心线的距离,并设定车辆左侧车道中心线平行位置为坐标系原点,设定障碍物左侧车道中心线平行位置为目标终点,计算出本车在车辆坐标系的位置,并设置为起点。
进一步的,车辆向右变道进行目标点位置确认时,根据惯导设备能够定位到自身位置,并且设定自身位置为起点位置,根据激光雷达感知到的障碍物位置在地图上进行障碍物标记;
结合真实场景,确定本车道中心线与相邻车道中心线的距离,并设定车辆右侧车道中心线平行位置为坐标系原点,设定障碍物右侧车道中心线平行位置为目标终点,计算出本车在车辆坐标系的位置,并设置为起点。
进一步的,根据惯导得到的车辆位置、计算的坐标系的原点位置、计算的坐标系的终点位置、以及障碍物的位置相对于车辆的位置,确定一个栅格地图,并且根据车辆原始笛卡尔坐标系中轨迹点的间隔,确定栅格地图的分辨率,以此确定栅格地图的长、宽。
进一步的,在构建基于激光雷达与惯导定位设备的局部地图时,地图上根据障碍物的宽度,建立的栅格地图在边缘处设定障碍物的坐标值为1,其他坐标值为0,制作地图方面使用的分辨率为0.5米。
对比现有技术,本发明的有益效果在于:
本发明公布的一种基于混合A星的低速商用无人车路径规划算法,功能明确,能够满足低速商用无人车路径规划的需求,适用于低速封闭区域、半开放道路功能场景;可提供一种简单、快速、准确的建图方式,以满足低速商用无人车路径规划的地图需求;可通过设置车辆运动学模型,对车辆进行建模,通过混合A星算法,生成一条满足车辆实际运行轨迹的曲线。
附图说明
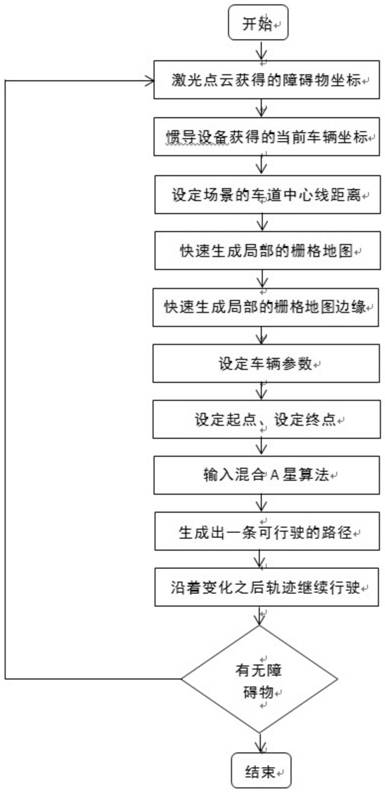
附图1是本发明的路径规划算法流程示意图。
附图2是本发明的向左变道时的规划路线图。
附图3是本发明的向右变道时的规划路线图。
附图4是本发明的连续变道时的规划路线图。
具体实施方式
下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所限定的范围。
本发明所述是一种基于混合A星的低速商用无人车路径规划算法,主体结构包括如下步骤:
S1、在激光雷达感知到障碍物后,输出障碍物根据相应坐标的位置,并根据惯导定位设备,确定车辆位置;并根据惯导定位设备,确定车辆位置。包括以下步骤:1)激光雷达首先需要进行标定,把激光雷达的位置标定到车体坐标系下;2)在激光雷达感知到障碍物以后,输出车体坐标系下的障碍物的坐标;3)在车辆行驶过程中,使用的是笛卡尔坐标系,在确定车辆位置以后,把车辆在笛卡尔坐标系中的位置作为初始位置;
S2、根据惯导定位设备与激光雷达感知的障碍物位置,确定无人车后续的目标点位置;
S3、构建基于激光雷达与惯导定位设备的局部地图,并且设定边缘地图的权重,来配合混合A星算法的应用;在封闭区域或者半封闭区域中,车辆行驶的道路都是具有固定宽度的,同时为了减少算法的复杂性,低速商用无人车,都会沿着最右侧车道行驶,而且在车辆行驶过程中,车辆会先往左变道,然后往右变道,因此一般分成左变道和右变道两种工况的最终目标点的确定方法;
S4、利用混合A星算法,并设定车辆运动学参数,生成一条无碰撞的轨迹路线,现有展示的轨迹是在惯导、车辆、激光为坐标系下的位置,在生成完本坐标系的轨迹之后,会把该轨迹转化成笛卡尔坐标系下轨迹,发给控制模块,方便控制模块处理;在封闭区域或者半封闭区域中,使用的车辆类型是固定的,车辆的长度、宽度是固定的,为了实现低速封闭区域的换道功能,需要如下步骤:
1)因为车辆是固定的,在设置车辆运动学模型时,需要设置车辆的长度与宽度;2)通过输入起点与终点,使用混合A星算法,得到可行驶轨迹点的坐标点位置与航向信息;3)在混合A星算法中,解决车辆运动学模型,能够生成出一条适合真实的车辆行驶的轨迹;4)使用混合A星得到的轨迹是在当前车辆的惯导与激光雷达建立的坐标系中,需要把这个坐标系的信息转换成笛卡尔坐标系中使用;5)当没有障碍物时,建立的栅格地图自动消失,不需要实时的创建栅格地图。
优选的,利用激光雷达感知障碍物位置时,4个激光雷达分别装在车体的左前、左后、右前、右后的位置,所述激光雷达是机械式激光雷达,其探测范围为360°,但是因为车身遮挡,因此使用4个雷达,可以做到车身的四个方向都存在冗余设计,使对障碍物的感知更加准确。
优选的,障碍物坐标确认时,激光雷达感知到障碍物后,输出障碍物根据车体坐标的位置;当激光雷达没有感知到障碍物时,不输出障碍物位置,不提供障碍物相应坐标位置,这样的设置能够大大降低路径规划时的运算量,提供快速准确的构图方法,提高路径规划的效率。
优选的,车辆向左变道进行目标点位置确认时,根据惯导设备能够定位到自身位置,并且设定自身位置为起点位置,根据激光雷达感知到的障碍物位置在地图上进行障碍物标记;
结合真实场景,确定本车道中心线与相邻车道中心线的距离,并设定车辆左侧车道中心线平行位置为坐标系原点,设定障碍物左侧车道中心线平行位置为目标终点,计算出本车在车辆坐标系的位置,并设置为起点,这样的设置,在感知到障碍物需要向左变道时,才进行障碍物位置的输出,使向左变道的路径迅速规划,大大降低向左自动变道时系统的运算量。
优选的,车辆向右变道进行目标点位置确认时,根据惯导设备能够定位到自身位置,并且设定自身位置为起点位置,根据激光雷达感知到的障碍物位置在地图上进行障碍物标记;
结合真实场景,确定本车道中心线与相邻车道中心线的距离,并设定车辆右侧车道中心线平行位置为坐标系原点,设定障碍物右侧车道中心线平行位置为目标终点,计算出本车在车辆坐标系的位置,并设置为起点,这样的设置在感知到障碍物需要向右变道时,才进行障碍物位置的输出,使向右变道的路径迅速规划,大大降低向右自动变道时系统的运算量。
优选的,根据惯导得到的车辆位置、计算的坐标系的原点位置、计算的坐标系的终点位置、以及障碍物的位置相对于车辆的位置,确定一个栅格地图,并且根据车辆原始笛卡尔坐标系中轨迹点的间隔,确定栅格地图的分辨率,以此确定栅格地图的长、宽,能够充分与混合A星算法的应用相配合,充分利用混合A星算法的优势,实现路径的快速规划。
优选的,在构建基于激光雷达与惯导定位设备的局部地图时,地图上根据障碍物的宽度,建立的栅格地图在边缘处设定障碍物的坐标值为1,其他坐标值为0,制作地图方面使用的分辨率为0.5米,1)根据惯导设备得到车辆的笛卡尔坐标系下的位置,然后把车辆在笛卡尔坐标系中的位置进行初始化;2)在这里把检测到障碍物距离车辆的位置作为地图的长度,把两个车道中心线的距离设置为宽度;3)地图上根据障碍物的宽度,设置障碍物对应的坐标点的位置处的数组为1;4)目前使用的场景都是低速封闭区域和低速半封闭区域,所以在制作地图方面使用的分辨率为0.5米;5)若车道是向左变道的,则在制作栅格地图过程中,根据原点、目标点、车辆位置、障碍物位置,确定出来一个按照分辨率为0.5米的左侧栅格地图;6)若车道是向右变道的,则在制作栅格地图过程中,根据原点、目标点、车辆位置、障碍物位置,确定出来一个按照分辨率为0.5米的右侧栅格地图,由于在封闭区域或者半封闭区域中,车辆行驶的场景、行驶的道路是固定的,以此能够满足低速封闭区域的地图构建工作,同时能够快速的生成需要的地图。
工作原理:本发明公开一种基于混合A星的低速商用无人车路径规划算法,属于智能驾驶领域,利用地图算法模块、混合A星算法模块,地图算法模块中的激光雷达和惯导定位等设备,提供车辆地图信息、并完成临时地图创建、临时坐标点转换与发布等,混合A星算法模块根据地图模块的起点与终点、根据提供的车辆运动学模型、生成一条能够保证车辆平滑通行的轨迹路线。通过对车辆具体位置、利用混合A星算法得到路径的轨迹点,选择合适的路径发布模式以实现车辆路径规划算法,从而满足无人车自动路径规划的需求。
- 一种基于混合A星的低速商用无人车路径规划算法
- 基于Lazy Theta星和粒子群混合算法的水下潜器三维路径规划方法