一种树苗种植设备及其使用方法
文献发布时间:2023-06-19 11:42:32
技术领域
本申请涉及农林种植领域,尤其是涉及一种树苗种植设备及其使用方法。
背景技术
树苗也简称苗木,具有根系和苗干。各种果树苗、乔木、灌木幼苗的总称。丑梨一般指四季梨,隶属桃金娘科乔木,成熟果皮光滑,果皮黄白色,甘甜多汁,种子和皮风味极佳,带有玫瑰香味,除可供鲜食外,还可制成果酱,果冻及果汁等,亦可作药用。树苗在种植前,为保障树苗的存活率,树苗的根部一般都会置于土中。丑梨等果树苗在种植过程中,大多通过人工进行种植,通过拖拉机头等驱动装置进行牵引,利用犁进行开沟,人工将树苗放入沟内,再通过人工对沟进行盖土。
相关技术可参考公告号为CN205848195U的中国专利公开了一种自动化的水果树苗种植设备,包括支架,支架的底部设有步进电机,步进电机与传送带的一端连接,传送带的另一端与圆盘连接,圆盘的外壳通过支柱固定在支架的左侧外壁,支架的顶部内腔设有齿轮,移动架的底部均匀设有与齿轮相配合的矩形齿,支架的顶部设有移动架,移动架的顶部设有覆土装置,覆土装置的右侧设有洒水箱,洒水箱的右侧设有开沟装置。
针对上述中的相关技术,发明人认为,上述设备在种植树苗过程中,钻头进行钻孔开沟,开沟完成后,需人工手动把树苗放入到沟内,需人工携带树苗跟随设备一起移动,当所需种植的树苗较多时,人工携带的树苗数量有限,在种植时需往复搬运树苗随设备一起移动,消耗的时间和体力较多,种植较为不便,种植效率不佳。
发明内容
为了提高种植效率,本申请提供一种树苗种植设备及其使用方法。
第一方面,本申请提供一种树苗种植设备,采用如下的技术方案:
一种树苗种植设备,包括机头和牵引板,所述牵引板下端面设有第一电机,第一电机输出轴固定连接有钻头,牵引板连接有车厢,车厢设有底板,底板下端面四个端角处设有车轮,底板沿周向设有环形输送链,底板下端面设有两组盖土组件,底板背离牵引板的一端开设有第一通口,环形输送链沿周向固定连接有若干支撑板,支撑板均开设有与第一通口相对应的第二通口,支撑板上端面设有位于第二通口上方的放置箱,放置箱包括左板和右板,左板与右板卡接,底板靠近第一通口处设有分离组件,分离组件包括与底板固定连接的立架、与立架固定连接的第一气缸、与第一气缸固定连接的第一定位板、固设于第一定位板上的两个第二气缸、与第二气缸固定连接的第二定位板、固设于第二定位板上的夹持气缸,夹持气缸设有夹爪,左板和右板均固设有与夹爪相适配的拉杆。
通过采用上述技术方案,树苗种植设备在使用时,将若干树苗放置于放置箱内,机头带动牵引板和车厢间歇式移动,牵引板移动到指定位置时,第一电机带动钻头进行挖坑,环形输送链带动支撑板移动到第一通口上方,分离组件使得两个拉杆反向移动,使得左板和右板分离,进而树苗下落到土坑内,再通过盖土组件填坑,不需人工手动将树苗放入到沟内进行种植,同时减少了人工往复搬运树苗的时间,节省了人力和种植时间,提高了种植效率。
可选的,所述左板和右板内壁均固定连接有弹簧,弹簧端部固定连接有半环形的夹持软垫,两个夹持软垫相互配合。
通过采用上述技术方案,左板与右板逐渐分离时,在弹簧弹力作用下,夹持软垫与树苗苗干抵触,夹持软垫对树苗苗干进行限位,防止树苗在填坑过程中发生倾斜,保障了树木的后序正常生长。
可选的,所述盖土组件包括与底板下端面固定的第二电机、与第二电机输出轴固定连接的拨板,两个第二电机分别位于第一通口的两侧,拨板包括固定连接的两个弧形片,弧形片设有弧口,弧口均朝向第一通口设置。
通过采用上述技术方案,盖土组件在对土坑进行填坑时,第二电机输出轴正反转带动弧形片转动,将周边的土壤拨动到土坑内,不需人工将土壤填到坑内,有利于提高种植效率。
可选的,所述第一定位板两端固设有第三气缸,第三气缸输出端固定连接有弧形压板。
通过采用上述技术方案,左板与右板分离后,第三气缸带动弧形压板上下往复移动,对土坑内的土壤进行压实处理,有利于保障对树木的种植效果,提高树苗的抗倒伏能力。
可选的,所述第一电机固定连接有固定板,牵引板上端面固设有第四气缸,第四气缸输出端穿过牵引板与固定板固定连接。
通过采用上述技术方案,在进行挖坑时,第四气缸输出端先使得第一电机下移,挖坑结束后,第四气缸输出端带动第一电机上移,使钻头与土壤分离,完成挖坑操作,不需人工进行挖坑,操作简单方便。
可选的,所述牵引板背离车厢的一端固设有第三电机,第三电机输出轴固定连接有若干螺旋清扫叶片。
通过采用上述技术方案,第三电机带动螺旋清扫叶片转动,螺旋清扫叶片对土地表层的石子和石块进行拨动,便于后序钻头的正常挖坑操作,有利于提高种植效率。
可选的,所述底板上端面固设有水箱,水箱连接有水管,水管穿过底板与第一通口正下方相对应。
通过采用上述技术方案,水箱内的水流经水管流出对树苗进行浇水,在挖坑种植时完成对树苗的浇水,浇水较为简单便捷,有利于提高种植效率。
可选的,所述牵引板上端面固设有暂存箱,牵引板沿周向固设有护栏。
通过采用上述技术方案,暂存箱内可放置树苗,便于将暂存箱内的树苗再重新放入空的放置箱内,提高单次树苗的携带和种植数量,有利于节省种植时间;护栏起到防护作用,有利于提高操作人员的安全性。
第二方面,本申请提供一种树苗种植设备的使用方法,采用如下的技术方案:
一种树苗种植设备的使用方法,包括:树苗种植设备在使用时,将若干树苗放置于所有的放置箱内,机头带动牵引板和车厢间歇式移动,牵引板移动到指定位置时,第一电机带动钻头进行挖坑,环形输送链带动支撑板移动到第一通口上方,第一气缸带动第一定位板上的两个第二气缸移动到靠近放置箱处,第二气缸带动第二定位板分别移动到放置箱两侧,夹爪夹住拉杆后,再由第二气缸带动两个拉杆反向移动将左板和右板拉开,进而树苗下落到土坑内,再通过盖土组件将土壤埋进土坑,树苗在种植到土坑后,机头带动车厢继续向前移动,第一通口与树苗分离后,第二气缸推动两个夹爪,使左板与右板闭合,夹爪再与拉杆分离,第一气缸输出端复位,环形输送链转动使下一个放置箱与第一通口正对,重复上述过程,完成对多个树木的自动化种植。
通过采用上述技术方案,不需人工手动将树苗放入到沟内进行种植,也不需人工携带树苗跟随挖坑设备一起移动,减少了人工往复搬运树苗的时间,提高了生产效率。
综上所述,本申请包括以下至少一种有益技术效果:
1.树苗种植设备在使用时,将若干树苗放置于放置箱内,机头带动牵引板和车厢间歇式移动,牵引板移动到指定位置时,第一电机带动钻头进行挖坑,环形输送链带动支撑板移动到第一通口上方,分离组件使得两个拉杆反向移动,使得左板和右板分离,进而树苗下落到土坑内,再通过盖土组件填坑,节省了人力和种植时间,提高了种植效率;
2.左板与右板分离后,第三气缸带动弧形压板上下往复移动,对土坑内的土壤进行压实处理,有利于保障对树木的种植效果,提高树苗的抗倒伏能力;
3.不需人工手动将树苗放入到沟内进行种植,也不需人工携带树苗跟随挖坑设备一起移动,减少了人工往复搬运树苗的时间,提高了生产效率。
附图说明
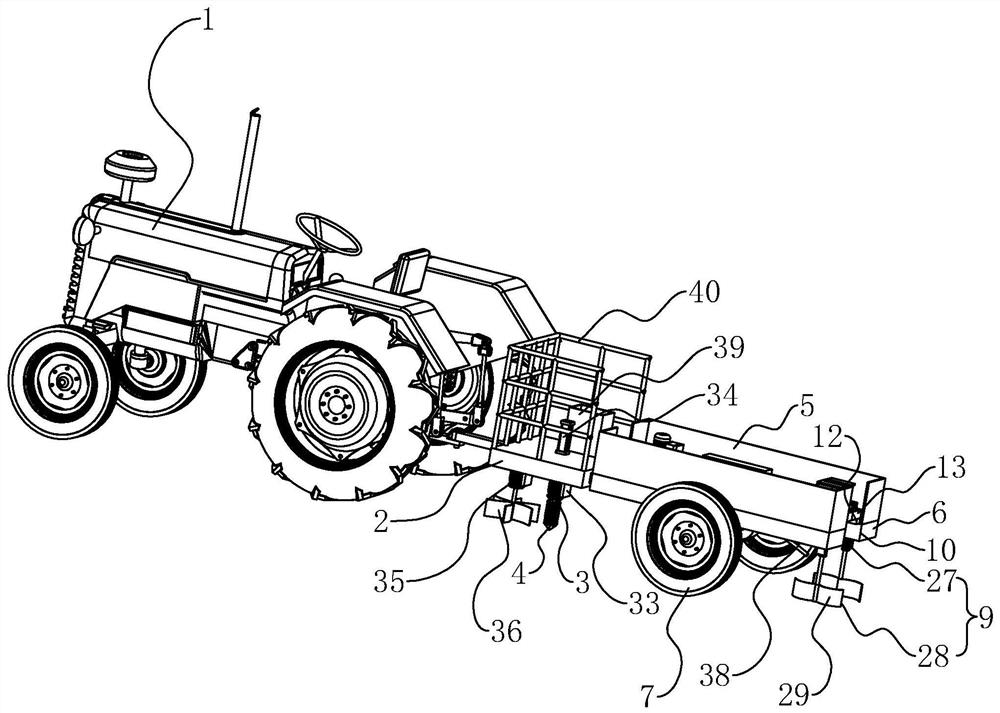
图1是本申请实施例一种树苗种植设备的整体结构示意图。
图2是车厢的内部结构示意图。
图3是图2中A部分的放大示意图。
附图标记说明:1、机头;2、牵引板;3、第一电机;4、钻头;5、车厢;6、底板;7、车轮;8、环形输送链;9、盖土组件;10、第一通口;11、支撑板;12、第二通口;13、放置箱;14、左板;15、右板;16、分离组件;17、立架;18、第一气缸;19、第一定位板;20、第二气缸;21、第二定位板;22、夹持气缸;23、夹爪;24、拉杆;25、弹簧;26、夹持软垫;27、第二电机;28、拨板;29、弧形片;31、第三气缸;32、弧形压板;33、固定板;34、第四气缸;35、第三电机;36、螺旋清扫叶片;37、水箱;38、水管;39、暂存箱;40、护栏。
具体实施方式
以下结合全部附图对本申请作进一步详细说明。
本申请实施例公开一种树苗种植设备。
实施例
参照图1,一种树苗种植设备,包括机头1和牵引板2,机头1可使用拖拉机等牵引装置,机头1与牵引板2通过锁紧螺栓等连接件可拆卸连接。牵引板2连接有长方体状且上端开口的车厢5,车厢5设有底板6,底板6下端面四个端角处和机头1均安装有车轮7,树苗种植设备在使用时,操作人员启动机头1,在机头1的牵引驱动作用下,机头1带动牵引板2和车厢5间歇式移动。
参照图1和图2,底板6上端面沿周向安装有环形输送链8,环形输送链8沿周向固定连接有若干支撑板11,支撑板11上端面安装有放置箱13,操作人员将若干树苗依次放置于支撑板11上的放置箱13内。牵引板2下端面安装有第一电机3,第一电机3输出轴固定连接有钻头4,第一电机3固定连接有固定板33,牵引板2上端面固设有第四气缸34,第四气缸34输出端穿过牵引板2与固定板33固定连接,在进行挖坑时,第四气缸34输出端伸长,带动固定板33上的第一电机3下移,牵引板2在间歇移动过程中,当牵引板2移动到指定位置时,启动第一电机3,第一电机3输出轴带动钻头4转动对土地进行钻土,进而钻头4在土地上挖出一个土坑,挖出的土壤分散在土坑周围,挖坑结束后,第四气缸34输出端收缩,进而带动第一电机3上移,使钻头4与土壤分离,完成挖坑操作,不需人工进行挖坑,操作简单,节省人力,可提高种植效率。
参照图1,在进行挖坑操作前,若前方土地存在石子或石块,钻头4与石块碰触,易使得钻头4的使用寿命受到不良影响,不利于钻头4进行挖坑;牵引板2下端面背离车厢5的一端安装有第三电机35,机头1在带动牵引板2移动过程中,启动第三电机35,第三电机35输出轴固定连接有若干螺旋清扫叶片36,第三电机35输出轴转动带动螺旋清扫叶片36转动,螺旋清扫叶片36对土地表层的石子和石块进行拨动,将石子和石块移动到土坑周边,便于后序钻头4的正常挖坑操作。
参照图1和图2,底板6上端面靠近牵引板2的一端固定有第四电机,第四电机输出轴固定连接有与环形输送链8相啮合的第一齿轮,底板6背离牵引板2的一端转动连接有与环形输送链8相啮合的第二齿轮。土坑挖出后,启动第四电机,第四电机输出轴带动,第一齿轮转动,在第一齿轮与第二齿轮的传动作用下,环形输送链8转动,底板6背离牵引板2的一端开设有第一通口10,环形输送链8带动支撑板11移动到第一通口10上方,支撑板11均开设有与第一通口10相对应的第二通口12,放置箱13位于支撑板11上端面的第二通口12上方,使得支撑板11的第二通口12与第一通口10正对,放置箱13包括左板14和右板15,左板14与右板15卡接,左板14和右板15均呈“凵”字形。
参照图2和图3,底板6靠近第一通口10处设有分离组件16,分离组件16包括立架17、第一气缸18、第一定位板19、两个第二气缸20、两个第二定位板21和两个夹持气缸22,立架17与底板6固定连接,第一气缸18与立架17固定连接,第一定位板19与第一气缸18输出端固定连接,当第一通口10与第二通口12正对时,停止第四电机,启动第一气缸18,第一气缸18输出端带动第一定位板19向靠近第一通口10处移动。
参照图2和图3,第二气缸20均均与第一定位板19固定连接,并且两个第二气缸20反向设置,第一定位板19上的两个第二气缸20移动到靠近放置箱13处,第二定位板21与第二气缸20输出端固定连接,第二气缸20输出端先收缩,带动两个第二定位板21分别移动到放置箱13的两侧,夹持气缸22固设于第二定位板21上,夹持气缸22设有夹爪23,夹爪23均朝向第一通口10,左板14和右板15均固设有与夹爪23相适配的拉杆24,夹持气缸22的夹爪23夹住拉杆24,再由第二气缸20输出端伸长,分别带动两个拉杆24反向移动,进而将左板14和右板15拉开,使放置箱13内的树苗经过第二通口12和第一通口10下落到土坑内,底板6下端面背离牵引板2的一端安装有两组盖土组件9,再通过两组盖土组件9将土坑周边的土壤掩埋进土坑内进行填坑,不需人工手动将树苗放入到沟内进行种植,不需人工携带树苗跟随挖坑设备一起移动,减少了人工往复搬运树苗的时间,节省了人力和种植时间,提高了自动化程度,种植较为方便,提高了种植效率。
参照图2和图3,树苗在种植到土坑后,机头1(参照图1)带动车厢5(参照图1)继续向前移动,第一通口10与树苗分离后,第二气缸20输出端收缩,进而两个夹爪23推动左板14与右板15闭合,再由夹持气缸22的夹爪23与拉杆24分离,第一气缸18输出端收缩复位,环形输送链8转动,使得下一个放置箱13与第一通口10正对,重复上述过程,完成对多个树木的自动化种植。
参照图2和图3,树苗放到放置箱13内后,可能会左右发生摆动,进而在种植到土坑内时可能会发生倾斜,影响树苗后序的正常生长;左板14和右板15内壁均固定连接有弹簧25,弹簧25端部固定连接有半环形的夹持软垫26,两个夹持软垫26相互配合,弹簧25在自然状态下时,夹持软垫26位于靠近放置箱13中部处,将树苗放到放置箱13内时,两侧的夹持软垫26与树苗苗干抵触,此时弹簧25被压缩,使树苗在放置箱13内不发生倾斜;左板14与右板15逐渐分离时,在弹簧25弹力作用下,夹持软垫26仍与树苗苗干抵触,两侧的夹持软垫26对树苗苗干限位,防止树苗在填坑过程中发生倾斜,对树苗的种植效果较好,保障树木的后序正常生长。树苗下落到土坑埋土后,两个第二气缸20分别带动左板14与右板15反向移动,使得夹持软垫26与树苗苗干分离。
参照图2和图3,盖土组件9包括两个第二电机27和两个拨板28,第二电机27与底板6下端面固定,两个第二电机27沿底板6宽度方向设置并且分别位于第一通口10的两侧,盖土组件9在对土坑进行填坑时,启动第二电机27,拨板28与第二电机27输出轴固定连接,拨板28包括固定连接的两个弧形片29,第二电机27输出轴与两个固定连接的弧形片29相交处固定连接,第二电机27输出轴正反转,第二电机27带动拨板28上的弧形片29转动,弧形片29设有弧口,弧口均朝向第一通口10设置,弧形片29的弧口与第一通口10对应,进而弧形片29在正反转时将周边的土壤拨动到土坑内,完成填坑操作,不需人工将土壤填到坑内,节省了人力和生产时间,有利于提高种植效率。
参照图2和图3,在将土壤填到土坑内时,土壤在土坑内较为稀疏,需要对坑内的土壤进行压实处理,以便后续提高树苗的抗倒伏能力;第一定位板19沿长度方向的两端固设有第三气缸31,左板14与右板15分离后,两个夹持软垫26与树苗分离,启动第三气缸31,第三气缸31输出端固定连接有弧形压板32,第三气缸31输出端带动弧形压板32上下往复移动,弧形压板32对土坑内的土壤进行压实处理,有利于保障对树木的种植效果,提高树苗的抗倒伏能力。
参照图2和图3,底板6上端面固设有水箱37,水箱37位于环形输送带内,水箱37连接有水管38,水箱37与水管38连接处设有水泵,树苗在种植到土坑后,水箱37内的水在水泵的作用下,水流经水管38流出,水管38穿过底板6与第一通口10正下方相对应,水从水管38流出对树苗进行浇水,在挖坑种植时完成对树苗的浇水,浇水较为方便,不需人工再单独进行浇水操作,节省了人力和时间,有利于提高种植效率。
参照图1和图2,牵引板2上端面固设有暂存箱39,暂存箱39上端开口,暂存箱39内可放置树苗,当放置箱13内的树苗种植后,放置箱13移动到靠近牵引板2一端时,操作人员可将暂存箱39内的树苗再重新放入空的放置箱13内,提高单次树苗的携带和种植数量,有利于节省种植时间,提高种植效率;牵引板2沿周向固定有护栏40,操作人员站在牵引板2上时,护栏40起到防护作用,提高了操作人员的安全性。
本申请实施例一种树苗种植设备的实施原理为:树苗种植设备在使用时,将若干树苗放置于放置箱13内,机头1带动牵引板2和车厢5间歇式移动,牵引板2移动到指定位置时,第一电机3带动钻头4进行挖坑,环形输送链8带动支撑板11移动到第一通口10上方,分离组件16使得两个拉杆24反向移动,使得左板14和右板15分离,进而树苗下落到土坑内,再通过盖土组件9填坑,第三气缸31输出端带动弧形压板32上下往复移动,对土坑内的土壤进行压实处理,提高树苗的抗倒伏能力,树苗在种植到土坑后,水箱37内的水经水管38流出,对树苗进行浇水,在挖坑种植时完成对树苗的浇水,不需人工手动将树苗放入到沟内进行种植,同时减少了人工往复搬运树苗的时间,节省了人力和种植时间,提高了种植效率。
本申请实施例还公开一种树苗种植设备的使用方法。
一种树苗种植设备的使用方法,包括:树苗种植设备在使用时,将若干树苗放置于所有的放置箱13内,机头1带动牵引板2和车厢5间歇式移动,牵引板2移动到指定位置时,第一电机3带动钻头4进行挖坑,环形输送链8带动支撑板11移动到第一通口10上方,第一气缸18带动第一定位板19上的两个第二气缸20移动到靠近放置箱13处,第二气缸20带动第二定位板21分别移动到放置箱13两侧,夹爪23夹住拉杆24后,再由第二气缸20带动两个拉杆24反向移动将左板14和右板15拉开,进而树苗下落到土坑内,再通过盖土组件9将土壤埋进土坑,树苗在种植到土坑后,机头1带动车厢5继续向前移动,第一通口10与树苗分离后,第二气缸20推动两个夹爪23,使左板14与右板15闭合,夹爪23再与拉杆24分离,第一气缸18输出端复位,环形输送链8转动使下一个放置箱13与第一通口10正对,重复上述过程,完成对多个树木的自动化种植。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种树苗种植设备及其使用方法
- 一种种植油茶树苗用的轻基质粉碎装置及其使用方法