打印设备
文献发布时间:2023-06-19 12:05:39
本申请是申请日是2018年3月9日、申请号为201810217548X、发明名称为“打印设备”的申请的分案申请。
技术领域
本发明涉及在从卷绕有连续片材的卷筒片材中拉出的片材上进行打印的打印设备。
背景技术
日本特开2011-37557号公报中公开了一种自动检测安装的卷筒片材(以下也简称为“卷筒”)的片材前端的打印设备。在该设备中,卷筒沿与供给方向相反的卷绕方向转动,并且通过置在卷筒附近的光学传感器检测片材前端由于其自重与卷筒的分离(以下也称为“剥离”)。
在日本特开2011-37557号公报中公开的光学传感器基于在从卷筒剥离的片材的前端经过与卷筒的切线平行的传感器光轴的时刻由反射光获得的输出来检测片材的剥离。传感器输出在此时的信号强度大致为零,直到剥离的片材前端到达传感器光轴,在片材前端经过传感器光轴的时刻由在片材前端的边缘处的反射光产生脉冲状信号。在经过传感器光轴之后,传感器光照射到剥离的片材的内表面,但是因为传感器光轴和片材的内表面大致平行,所以片材的内表面与光学传感器之间的距离突然增大,反射强度弱,并且在经过之后信号电平突然下降。换言之,日本特开2011-37557号公报中公开的光学传感器仅能够确定片材前端在剥离过程中经过传感器光轴的时刻。
然而,在实际设备中,在从卷筒剥离片材的行为中,剥离率(片材前端移动的速度)依据诸如使用的片材的刚性(对应于弯曲的片材尝试返回到初始状态的返回力)和静电充电的各种情况而改变。因此,在如日本特开2011-37557号公报中的在剥离过程中使用瞬时信号脉冲检测片材前端的形式中,信号脉冲的产生时间依据情况而变化,并且可能难以高度精确地检测检测片材剥离。时间偏差可能妨碍后续片材给送操作。日本特开2011-37557号公报未公开任何对于这种问题的解决方案。
发明内容
本发明提供能够精确地检测从卷筒剥离的片材并且进行自动片材给送的打印设备。
在本发明中,提供一种打印设备,该打印设备包括:
保持单元,其被构造成保持具有卷绕成卷状的连续片材的卷筒片材;
打印单元,其被构造成在从所述保持单元供给的所述片材上进行打印;
驱动单元,其被构造成通过沿第一方向转动以使保持在所述保持单元中的所述卷筒片材沿前进方向转动并将所述片材供给到所述打印单元;
传感器,其被构造成根据离保持在所述保持单元中的所述卷筒片材的片材的距离而改变输出;以及
控制单元,其被构造成使所述驱动单元沿与所述第一方向相反的第二方向转动以使所述卷筒片材沿相反方向转动,并且被构造成基于在所述卷筒片材沿所述相反方向转动期间所述传感器的输出而将所述驱动单元的转动方向从所述第二方向切换到所述第一方向。
根据本发明,能够精确地检测从卷筒剥离的片材并且进行自动片材给送。
本发明的其它特征将从参照附图的示例性实施方式的以下说明中变得显而易见。
附图说明
图1是根据本发明的打印设备的立体图。
图2是打印设备中的片材输送路径的说明图。
图3A是片材供给设备的说明图,图3B是图3A中的摆动构件的放大图。
图4是在卷筒外径小时片材供给设备的说明图。
图5是说明打印设备的控制系统的框图。
图6是片材供给准备处理的流程图。
图7是本发明的第一实施方式中的传感器单元的说明图。
图8是说明片材前端设置处理的流程图。
图9A、图9B和图9C是传感器单元的输出与片材的前端部的位置之间的关系的说明图。
图10A、图10B和图10C是本发明的第二实施方式中的传感器单元的输出与片材的前端部的位置之间的关系的说明图。
图11是说明片材前端设置处理的流程图。
图12是本发明的第三实施方式中的打印设备的控制系统的框图。
图13是传感器单元的传感器输出的说明图。
图14是说明传感器的放大率调整处理的流程图。
图15A和图15B是本发明的第四实施方式中的传感器单元的配备位置的说明图。
图16A和图16B是传感器单元的光轴与卷筒的外周面之间的关系的说明图。
图17A和图17B是传感器单元的构造的说明图。
图18A和图18B是本发明的第五实施方式中的传感器单元的配备位置的说明图。
图19A、图19B和图19C是本发明的第六实施方式中的传感器单元的输出与片材的前端部的位置之间的关系的说明图。
图20A、图20B和图20C是片材的前端部的行为的说明图。
图21是说明片材前端设置处理的流程图。
图22是本发明的第七实施方式中的片材的前端部的停止位置的说明图。
图23是说明片材前端设置处理的流程图。
图24A和图24B是片材供给设备的另一构造示例的说明图。
具体实施方式
以下,将参照附图说明本发明的示例性实施方式。首先,将说明本发明的基本构成。
<基本构造>
图1至图5是根据本发明的实施方式的打印设备的基本构造的说明图。本示例的打印设备是喷墨打印设备,该喷墨打印设备包括供给作为打印介质的片材的片材供给设备以及在片材上打印图像的打印单元。为了说明,如图所示设置坐标轴。换言之,将卷筒R的片材宽度方向设置为X轴方向,将后述的片材在打印单元400中被输送的方向设置为Y轴方向,将重力方向设置为Z轴方向。
如图1所示,在本示例的打印设备100中,通过将作为长连续片材(也称为带)的片材1卷绕成卷筒形式而获得的卷筒R(卷筒片材)可以设置在上下两个卷筒保持单元中的每一个中。将图像打印在有选择地从卷筒R拉出的片材1上。使用者能够使用安装在操作面板28中的各种钮对打印设备100输入例如各种指令,诸如指示片材1的尺寸的指令或进行在线与离线之间切换的指令。
图2是打印设备100的主要部分的示意性截面图。对应于两个卷筒R的两个供给设备200一个在另一个上方地安装。由供给设备200从卷筒R中拉出的片材1通过片材输送单元(输送机构)300沿着片材输送路径被输送到能够打印图像的打印单元400。打印单元400通过从喷墨型打印头18喷射墨而在片材1上打印图像。打印头18使用诸如电热换能器(加热器)或压电元件的喷射能量产生元件来从喷射口喷射墨。打印头18不仅限于喷墨系统,并且打印单元400的打印系统不受限制,并且例如可以使用串行扫描系统或全幅系统(fullline system)。在串行扫描系统的情况中,与片材1的输送操作相关联地打印图像,并且沿着与片材1的输送方向交叉的方向扫描打印头18。在全幅系统的情况中,在连续地输送片材1的同时,使用沿着与片材1的输送方向交叉的方向延伸的长打印头18打印图像。
卷筒R以如下状态被设置在供给设备200的卷筒保持单元中:卷轴构件2插入卷筒R的中空孔部,并且卷轴构件2由用于驱动卷筒R的马达33(参照图5)驱动以正转或反转。供给设备200包括如后所述的驱动单元3、臂构件(移动体)4、臂转动轴5、传感器单元6、摆动构件7、驱动转动体(接触体)8和9、分离挡板(上引导体)10以及挡板转动轴11。
输送引导件12在引导从供给设备200拉出的片材1的正面和背面的状态下将片材1引导至打印单元400。输送辊14通过后述的输送辊驱动马达35(参照图5)沿箭头D1和D2的方向正转或反转。夹送辊15能够根据输送辊14的转动而驱动地转动,并且夹送辊15能够通过夹持力调整马达37(参照图5)与输送辊14接触或与输送辊14分离,从而能够调整夹送辊15的夹持力。片材1的由输送辊14导致的输送速度被设置为高于片材1的由卷筒R的转动导致的拉出速度,使得能够对片材1施加反张力(back tension)并在片材1被拉伸的状态下输送片材1。
打印单元400的台板17调节片材1的位置,并且切割器20切割打印有图像的片材1。卷筒R的盖42防止打印有图像的片材1进入供给设备200。打印设备100中的操作由后述的CPU201(参照图5)控制。台板17包括使用负压或静电力的吸附装置,因为片材被吸附在台板17上,所以能够稳定地支撑片材。
图3A和图3B是供给设备200的说明图,图3A中的卷筒R处于外径相对大的状态。臂构件(移动体)4以能够绕着臂转动轴5沿箭头A1和A2的方向转动的方式安装到输送引导件12。引导从卷筒R拉出的片材1的下表面(片材的正面或打印面)的引导部4b(下引导体)形成于臂构件4的上部。沿箭头A1的方向压臂构件4的螺旋扭转弹簧3c介于臂构件4与驱动单元3的转动凸轮3a之间。后述的压力调整马达34(参照图5)使转动凸轮3a转动,螺旋扭转弹簧3c沿箭头A1的方向压臂构件4的力根据转动凸轮3a的转动位置而变化。当片材1的前端部(片材1的包括前端的部分)被设置在臂构件4与分离挡板10之间的片材供给路径时,依据转动凸轮3a的转动位置,螺旋扭转弹簧3c对臂构件4的压力分三个阶段进行切换。换言之,臂构件4的压力被切换为较小力(弱夹持的压力)的加压状态、较大力(强夹持的压力)的加压状态、以及压力释放状态。
摆动构件7可摆动地安装到臂构件4,并且定位成沿卷筒R的周向偏离的第一和第二驱动转动体(转动体)8和9可转动地安装到摆动构件7。驱动转动体8和9根据卷筒R的外形移动,并且根据沿箭头A1的方向对臂构件4的压力而从重力方向的下方与卷筒R的外周部压力接触。换言之,驱动转动体8和9从卷筒R的水平方向上的中心轴的重力方向的下方与卷筒R的外周部压力接触。压力接触力根据沿箭头A1的方向压臂构件4的压力而改变。
均包括摆动构件7的多个臂构件4沿X轴方向设置于多个不同位置处。如图3B所示,摆动构件7包括轴承部7a和轴紧固部7b,因而臂构件4的转动轴4a被预定松弛地接收。
轴承部7a设置于摆动构件7的重心位置处并且由转动轴4a支撑,使得摆动构件7在X轴方向、Y轴方向、Z轴方向均具有稳定姿态。此外,因为转动轴4a被松弛地接收,所以多个摆动构件7均依据沿箭头A1的方向对臂构件4的压力而沿着卷筒R的外周部布置。利用这种构造(均衡机构),允许第一和第二驱动转动体8和9相对于卷筒R的外周部的压力接触姿态的变化。结果,片材1与第一和第二驱动转动体8和9之间的接触区域保持最大,并且对片材1的压力被均衡,因而能够抑制片材1的输送力的变化。因为驱动转动体8和9与卷筒R的外周部压力接触,所以抑制了片材1中的松弛的发生,并且增强了片材1的输送力。
在打印设备100的主体(打印机主体)中,定位在臂构件4上方的分离挡板10以能够绕着挡板转动轴11沿箭头B1和B2的方向转动的方式安装。分离挡板10被构造成通过其自重轻轻压卷筒R的外周面。在必须较强地压卷筒R的情况下,可以使用诸如弹簧的施力构件施力。从动辊(上侧接触体)10a可转动地设置于分离挡板10与卷筒R的接触部分处,以抑制片材1上的压力的影响。分离挡板10的前端的分离部10b被形成为延伸到尽可能靠近卷筒R的外周面的位置,以便利于片材的前端部从卷筒R分离。
在片材的正面(打印面)被臂构件4的引导部4b引导之后,通过形成于分离挡板10与臂构件4之间的供给路径供给片材1。因此,能够利用片材1的重量平顺地供给片材1。此外,因为驱动转动体8和9以及引导部4b依据卷筒R的外径移动,所以能够可靠地从卷筒R拉出片材1并且即使当卷筒R的外径改变时也能输送片材。
根据本实施方式的设备的一个特征在于自动片材加载功能(自动片材供应功能)。在自动加载中,当使用者在设备中设置卷筒R时,设备检测片材的前端,同时沿图3A中的箭头C2(被称为相反方向或第二方向)转动卷筒R。第二方向与在供给片材的情况下的图3A中的箭头C1的转动方向(被称为第一方向)相反。传感器单元6是包括检测片材1的前端部从卷筒R的外周面分离的前端检测传感器的单元。如果传感器单元6检测到片材1的前端部从卷筒片材的外周面分离,则设备使卷筒R沿第一方向转动并且将片材1的前端部供给到臂构件4与分离挡板10之间的片材供给路径内。稍后将说明自动加载功能的更详细过程。
此外,本示例的打印设备100包括上下两个供给设备200,并且能够进行从片材1被从一个供给设备200供给的状态切换到片材1被从另一供给设备200供给的状态。在这种情况下,一个供给设备200将已经被供给的片材1重新卷绕到卷筒R上。片材1的前端被排出到传感器单元6检测到的位置。
图4是在卷筒R的外径相对小时供给设备200的说明图。因为臂构件4被螺旋扭转弹簧3c沿箭头A1的方向压,所以臂构件4根据卷筒R的外径的减小而沿箭头A1的方向移动。此外,通过使转动凸轮3a根据卷筒R的外径的改变而转动,即使卷筒R的外径改变,螺旋扭转弹簧3c对臂构件4的压力也能够维持在预定范围内。因为分离挡板10还被沿箭头B1的方向压,所以分离挡板10根据卷筒R的外径的减小而沿箭头B1的方向移动。因此,即使当卷筒R的外径减小时,分离挡板10也与输送引导件12一起形成供给路径并且由下表面10c引导片材1的上表面。如上所述,臂构件4和分离挡板10根据卷筒R的外径的改变而转动,因而即使当卷筒R的外径改变时,在臂构件4与分离挡板10之间也形成有具有大致恒定尺寸的供给路径。
图5是说明打印设备100中的控制系统的构造示例的框图。打印设备100的CPU201根据储存于ROM204的控制程序来控制包括供给设备200、片材输送单元300以及打印单元400的打印设备100的各单元。片材1的类型和宽度、各种设置信息等从操作面板28经由输入/输出界面202被输入到CPU201中。此外,CPU201经由外部界面205连接到包括诸如个人计算机的主机设备的各种外部设备29,并且与外部设备29交换诸如打印数据的各种信息。此外,CPU201在RAM203上进行关于片材1等的信息的读取和写入。马达33是用于使卷筒R通过卷轴构件2正转或反转的卷筒驱动马达,并且构成能够转动地驱动卷筒R的驱动机构(转动机构)。压力调整马达34是用于使转动凸轮3a转动以便调整对臂构件4的压力的马达。输送辊驱动马达35是用于使输送辊14正转或反转的马达。卷筒传感器32是用于当卷筒R被设置在供给设备200中时检测卷筒R的卷轴构件2的传感器。卷筒转动量传感器36是用于检测卷轴构件2的转动量的传感器(转动角度检测传感器),并且卷筒转动量传感器36是例如输出数量与卷筒R的转动量相对应的脉冲的旋转编码器。
<片材供给准备处理>
图6是从卷筒R的设置开始说明片材1的供给准备处理的流程图。
打印设备100的CPU201在臂构件4被“弱压力”沿箭头A1的方向压的状态(弱夹持状态)下待机,并且首先确定卷筒R是否被设置(步骤S1)。在本示例中,当卷筒传感器32检测到卷筒R的卷轴构件2时,确定卷筒R被设置。在设置卷筒R之后,CPU201切换到臂构件4被“强压力”沿箭头A1的方向压的状态(强夹持状态)(步骤S2)。然后,CPU201执行片材前端设置处理,其中片材1的前端部被设置在臂构件4与分离挡板10之间的片材供给路径中(步骤S3)。利用片材前端设置处理(自动加载),片材1的前端部被设置(插入)在片材供给路径中。稍后将详细说明片材前端设置处理。
此后,CPU201通过卷筒驱动马达33使卷筒R沿箭头C1的方向转动并且开始供给片材1(步骤S4)。当片材1的前端被片材传感器16检测到时(步骤S5),CPU201使输送辊14沿箭头D1的方向正转,拾取片材1的前端,然后停止马达33和马达35(步骤S6)。此后,CPU201取消沿箭头A1的方向压臂构件4的压力,使得第一和第二驱动转动体8和9与卷筒R分离(以进入夹持释放状态)(步骤7)。
此后,CPU201确定片材是否以片材在片材输送单元300中倾斜的状态被输送(歪斜)。具体地,片材1在片材输送单元300中以预定量被输送,并且通过安装在包括打印头18的滑架中或安装在片材输送单元300中的传感器检测此时发生的歪斜量。当歪斜量大于预定允许量时,利用输送辊14和卷筒R的正转和反转,片材1被反复地给送或反给送(back-fed),同时对片材1施加反张力。利用该操作,片材1的歪斜被纠正(步骤S8)。如上所述,当片材1的歪斜被纠正时或当在片材1上进行打印图像的操作时,供给设备200被设置为进入夹持释放状态。此后,在打印单元400开始打印之前,CPU201使片材输送单元300将片材1的前端移动到待机位置(固定位置)(步骤S9)。因此,完成了供给片材1的准备。此后,随着卷筒R的转动,片材1被从卷筒R拉出并且通过片材输送单元300被输送到打印单元400。
作为本发明的实施方式,以下将说明在打印设备100的基本构造中的图6的片材前端设置处理(步骤S3)。
(第一实施方式)
在本实施方式中,使用输出根据与片材1的正面(打印面)的间隔而变化的光学传感器作为传感器单元6。于是,在卷筒R沿相反方向(箭头C2的方向)转动期间基于传感器单元6的输出的变化检测到片材1的前端部从卷筒R的外周面分离之后,卷筒R沿箭头C1的前进方向转动以供给片材1。
如图7所示的本示例的传感器单元6中并入有诸如LED的发光单元6c和诸如光电二极管的受光单元6d。从发光单元6c朝向卷筒R照射的光被卷筒R中的片材1的正面反射然后被受光单元6d检测。从发光单元6c照射然后被受光单元6d检测的光包括从卷筒R中的片材1的正面反射的正反射光(regular reflection light)。受光单元6d的输出值根据传感器单元6与片材1的正面(由打印单元进行打印的打印面)之间的间隔而变化。换言之,受光单元6d的输出值随着传感器单元6与片材1的正面之间的距离(间隔)减小而增大并随着该距离(间隔)的增大而减小。发光单元6c和受光单元6d不仅限于LED和光电二极管,只要传感器单元6被构造成检测信号的输出值根据传感器单元6与片材1的正面之间的距离而改变即可。此外,由受光单元6d检测的光不限于正反射光。传感器单元6连接到CPU201(参照图5),CPU201在任意时刻获取传感器单元6的检测结果。
图8、图9A、图9B和图9C是使用传感器单元6的片材前端设置处理(图6中的步骤S3)的说明图。如上所述,片材前端设置处理(自动加载)是在设置卷筒R之后将卷筒R的片材1的前端部自动插入臂构件4与分离挡板10之间的片材供给路径中并给送片材1的处理。臂构件4面向片材1的正面(卷筒片材的外侧面或打印面),并且分离挡板10面向片材1的背面(卷筒片材的内侧面)。
CPU201确定卷筒R是否被设置(图6中的步骤S1)。在本示例中,当卷筒传感器32检测到卷筒R的卷轴构件2时确定卷筒R被设置。在卷筒R被设置之后,CPU201切换到臂构件4被“强压力”沿箭头A1的方向压的状态(强夹持状态)(图6中的步骤S2)。
在随后的片材前端设置处理(图6中的步骤S3)中,CPU201使卷筒R沿箭头C2的相反方向转动(反转)(步骤S11)。然后,在卷筒R的反转期间,确定传感器单元6的检测信号的输出(传感器信号电平)是否从H电平范围内(第一电平范围内)改变到L电平范围内(第二电平范围内)(步骤S12)。
图9A是传感器输出的波形示例的说明图,卷筒R的在卷筒R的反转的开始处的转动角度被设定为0°。一般地,传感器输出为L电平。当卷筒R反转170°时,如图9B所示,片材1的前端部与卷绕在内侧的卷筒片材的外周面分离并且到达传感器单元6的检测位置,传感器输出从L电平上升(增大)到H电平。
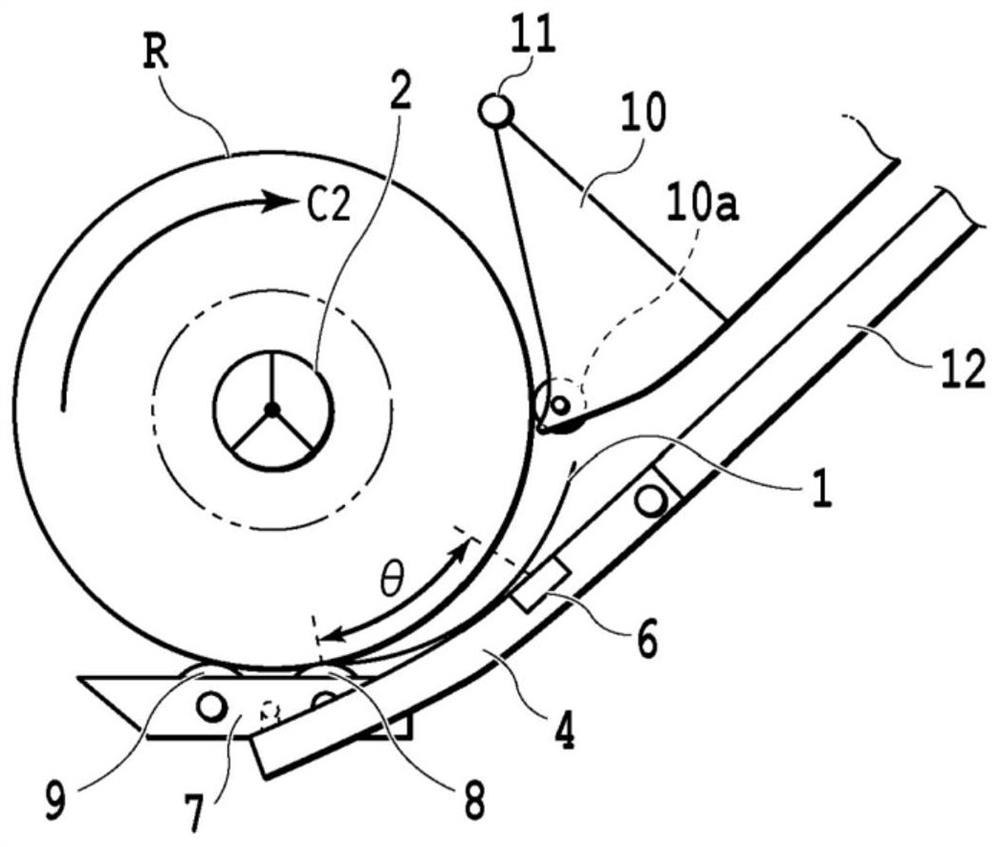
更具体地,当卷筒R转动170°时,片材1的前端部经过分离挡板10的从动辊10a的抵接位置。然后,片材1的前端部偏离抵接位置,与卷筒片材的外周面分离,并且由于其自重落到臂构件4上。这时,如图9B所示,片材以片材1的前端部逐渐到达传感器单元6的检测位置的方式移动。此外,当卷筒R反转200°时,如图9C所示,片材1的前端部经过传感器单元6上的检测位置。然后,来自片材1的前端部的强反射光消失,接收到来自卷绕在前端部的内侧的卷筒R的外周面的弱反射光,并且传感器输出从H电平急剧下降(减小)到L电平。此后,当卷筒R进一步反转角度θ时,片材1的前端部到达驱动转动体8的抵接位置。
通过将传感器单元6的输出强度划分成两个电平而获得H电平和L电平,当传感器单元6与卷筒R的片材1之间的间隔小时输出H电平,当该间隔大时输出L电平。作为划分这些电平的边界的阈值TH储存于打印机主体或传感器单元6内部的非易失性存储器中。阈值TH基于传感器输出L0和H0设置。换言之,基于当卷筒R转动一次以上时(例如多次)传感器输出的最小电平与最大电平之间的中间值而设置阈值TH。例如,当传感器输出的最小电平为L0且传感器输出的最大电平为H0时,能够将阈值TH设置为传感器输出L0和H0的中间值(TH=(H0+L0)/2)。因为阈值TH由于传感器单元6等的变化而波动,所以优选的是,对各独立的传感器单元6测量传感器输出L0和H0,并且基于测量值设置阈值TH。
如上所述,传感器输出随着与卷筒R分离的片材的前端部朝向传感器的检测位置移动而增大。然后,根据卷筒沿第二方向的转动,传感器输出随着片材的前端部经过传感器的检测位置的移动而减小。能够基于传感器输出的改变(预定改变)可靠地检测片材的前端与卷筒的分离。
如图9B所示,当片材1的前端部经过传感器单元6时,传感器输出从H电平改变到L电平,此后当传感器输出的L电平持续一段时间时,卷筒R的转动停止(步骤S13和步骤S14)。具体地,在传感器输出从H电平改变到L电平之后,进一步确定在卷筒R反转一定角度A的一定时间段内传感器输出是否连续地具有L电平,并且当在一定时间段内传感器输出连续地具有L电平时卷筒R的转动停止。一定角度A是小于角度θ的角度,并且在本示例的情况中,一定角度A是角度θ的一半(A=θ/2)。当在步骤S14中卷筒R的转动停止时,片材1的前端部位于传感器单元6与驱动转动体8之间的臂构件4。此后,当卷筒R沿箭头C1的方向正转(步骤S15)时,片材1的前端部能够自动插入并给送到臂构件4与分离挡板10之间的片材供给路径(自动加载)。
当即使卷筒R进行一次以上的反转(预定量为360°以上)传感器输出也不从H电平改变到L电平时,该处理从步骤S16继续到步骤S17。此外,即使卷筒R进行一次以上的反转(预定量为360°以上),当传感器输出的L电平没有持续一段时间时,该处理也从步骤S16继续到步骤S17。在这种情况下,认为片材1的前端部在卷筒R进行一次转动的同时不与卷筒R的外周面分离。在步骤S17中,卷筒R的转动停止,给予使用者表示自动加载(自动给送)不能被执行的通知以促使使用者进行手动操作(手动给送片材)将片材1的前端部插入片材供给路径。当插入了片材前端部时,使用者指示设备给送片材。基于该指示,卷筒R开始沿前进方向转动并且将插入的片材给送到设备中。如上所述,在本实施方式中,在设置卷筒R之后,片材1的前端部能够被自动插入片材供给路径并被给送。因此,使用者不需要在设置卷筒R之后手动地将片材1的前端部插入片材供给路径,由此减少设置卷筒R时的工作负担。
(第二实施方式)
图10A、图10B、图10C和图11是本发明的第二实施方式的说明图。传感器单元6的输出与上述实施方式相同地根据与片材1的间隔而改变。例如,在片材1的基重大且刚性高的情况下,当卷筒R沿箭头C2的方向反转时,在片材1的前端部经过驱动转动体9之后直到经过从动辊10a之前的期间内传感器输出有可能改变。换言之,在该期间内,传感器单元6的输出可能暂时从L电平增大到H电平然后返回到L电平。
图10A、图10B和图10C是当具有较大基重的片材1的卷筒R反转时传感器单元6的输出波形和片材1的前端部的行为的说明图。在片材1的前端部靠近从动辊10a的状态下,卷筒R开始沿箭头C2的方向反转。当卷筒R从转动开始位置转动大约45°时,片材1的前端部经过从动辊10a并且落到臂构件4上。结果,当卷筒R的转动角度为大约45°时,传感器单元6的输出从L电平增加到H电平。此后,当卷筒R从转动开始位置转动大约90°时,片材1的前端部越过传感器单元6。结果,当卷筒R的转动角度为大约90°时,传感器单元6的输出从H电平下降到L电平。
此外,当卷筒R继续反转并从转动开始位置转动大约270°时,片材1的前端部位于卷筒R的上部处,并且如图10B所示片材1由于其前端部的自重而可以弯曲。当这种弯曲发生时,片材1的正面到达传感器单元6。结果,当卷筒R的转动角度为大约270°时,传感器单元6的输出从L电平增大到H电平。此后,如果卷筒R进一步反转,则如图10C所示,片材1的弯曲部分卷绕于卷筒R,并且片材1与传感器单元6分离。结果,当卷筒R的转动角度为大约350°时,传感器单元6的输出从H电平返回到L电平。
当卷筒R继续反转时,传感器单元6的输出的这种改变反复。在本实施方式中,即使当传感器输出如上所述地改变时,也能够指定片材1的前端部的位置并且将前端部自动插入臂构件4与分离挡板10之间的片材供给路径中并给送片材1(片材前端设置处理)。
图11是说明本实施方式中的片材前端设置处理(自动加载)的流程图。
CPU201确定卷筒R是否被设置(图6中的步骤S1)。在卷筒R被设置之后,CPU201切换到臂构件4被“强压力”沿箭头A1的方向压的状态(强夹持状态)(图6中的步骤S2)。
在片材前端设置处理(图6中的步骤S3)中,CPU201使卷筒R沿箭头C2的相反方向转动(反转)(步骤S21),并且储存传感器输出(步骤S22)。例如,CPU201可以使卷筒R以恒定速度转动并且可以以一定时间间隔储存传感器输出。此外,为了更精确地指定片材1的前端部的位置,传感器输出可以与输出根据卷筒R的转动量而变化的卷筒转动量传感器36(参照图5)的脉冲同步地储存。在这种情况下,卷筒R的转动速度不需要恒定。作为传感器输出,优选的是在卷筒R进行一次转动的同时收集数据。然而,鉴于当卷筒R被设置时片材1的松弛,卷筒R进行一次以上的转动(在本示例的情况中为转动一圈半(540°)),并且收集数据(步骤S23)。
在完成数据收集之后,CPU201使卷筒R的转动停止(步骤S24),并且从储存在RAM203中的传感器输出的数据提取传感器输出的最高值Hd和最低值Ld(步骤S25)。此后,确定最高值Hd与最低值Ld之间的差(Hd-Ld)是否超过指定片材1的前端部的位置所必须的值(THa)(步骤S26)。阈值THa可以是固定值或可以针对各类型的片材1设定。此外,例如值THa可以根据高湿度环境或者低温低湿度环境而改变,在高湿度环境中片材1膨胀,在低温低湿度环境中,片材1的刚性变强。
当差(Hd-Ld)超过值(THa)时,CPU201基于最高值Hd和最低值Ld来计算用于确定传感器输出的H电平和L电平的阈值THd1和THd2(步骤S26和步骤S27)。鉴于由信号干扰等引起的噪声变化wn,阈值THd1和THd2被设置为具有滞后性的独立阈值。使用阈值THd1确定传感器输出从H电平到L电平的改变,并且使用阈值THd2确定从L电平到H电平的改变。依据片材的类型,光的反射特性不同,因而传感器单元6的传感器输出值波动。因此,基于卷筒R转动时传感器输出的数据设置阈值THd1和THd2。在指定已知片材的前端部的位置的情况下,预先保存在ROM204(参照图5)中的值可以被设定为阈值THd1和THd2。当获得的最高值Hd和最低值Ld的SN比足够大时,最高值Hd与最低值Ld之间的单个中间值可以被设定为用于确定传感器输出从H电平到L电平的改变以及从L电平到H电平的改变的阈值。
此后,在传感器输出基于卷筒R的一次转动的数据而从H电平改变到L电平之后,CPU201分析储存在RAM203中的传感器输出的数据并且获得L电平的持续时间PL(步骤S28)。可以基于卷筒转动量传感器36(参照图5)的输出脉冲或各给定时间段获得的数据来计算对应于持续时间PL的卷筒R的转动角度。当传感器输出改变多次,并且存在对应于卷筒R的转动角度A以上的多个持续时间PLAs时,CPU201选择最大持续时间PLAmax(步骤S29和步骤S30)。此后,CPU201指定片材1的前端部与卷筒R的外周面分离的位置(步骤S31)。具体地,如图10A所示,指定最大持续时间PLAmax之前的传感器输出的改变点Pa。改变点Pa对应于片材1的前端部与卷筒R的外周面分离的位置。当仅存在对应于转动角度A以上的一个持续时间PLA时,从持续时间PLA之前的传感器输出的改变点Pa指定片材1的前端部分离的位置(步骤S32和步骤S33)。
在步骤S31或步骤S33中指定了片材1的前端部分离的位置之后,CPU201使卷筒R沿箭头C2的方向反转直到片材1的前端部分离的位置(步骤S34)。因此,片材1的前端部从卷筒R的外周面分离并且定位在传感器单元6与驱动转动体8之间的臂构件4上。此后,当卷筒R沿箭头C1的方向正转(步骤S35)时,片材1的前端部能够自动插入臂构件4与分离挡板10之间的片材供给路径并给送片材1(自动加载)。
当在步骤S26中确定差(Hd-Ld)未超过阈值THa时,或当在步骤S32中确定不存在对应于转动角度A以上的持续时间PLA时,处理继续到步骤S36。在步骤S36中,卷筒R的转动停止,给予使用者表示自动加载不能被执行的通知以促使使用者手动操作将片材1的前端部插入片材供给路径。
如上所述,在本实施方式中,即使当传感器单元6的输出暂时发生波动时,也能够基于卷筒R反转时的传感器输出指定片材1的前端部与卷筒R分离的位置。
(第三实施方式)
图12是本发明的第三实施方式中的控制系统的框图。与第一实施方式相同,传感器单元6是输出根据与卷筒R的正面的间隔而变化的传感器。在本实施方式中,在CPU201的控制下具有调光功能的LED驱动器6e连接到诸如LED的发光单元6c,并且能够通过调整流向发光单元6c的电流来改变发光单元6c的发光强度的放大率。电流电压转换电路6h和放大电路6i连接到诸如光电二极管的受光单元6d,并且能够通过在CPU201的控制下调整数字电位器6f的电阻值来改变受光单元6d的受光灵敏度的放大率。此外,传感器单元6包括诸如非易失性存储器的EEPROM6g,以便储存例如传感器单元6的放大率(发光单元6c的发光强度的放大率以及受光单元6d的受光灵敏度的放大率)。
图13是卷筒R反转时传感器单元6的输出波形的说明图。当传感器单元6的传感器输出的最高值Hd大于上限确定值THmax时,传感器输出可能会饱和。当传感器单元6的传感器输出的最低值Ld小于下限确定值THmin时,传感器单元6的灵敏度可能会不足。此外,当最高值Hd与最低值Ld之间的差小于预定值时,传感器输出可能受到平稳噪声(stationarynoise)的影响,并且可能难以检测到片材1的前端部。因此,还设置用于确定最高值Hd与最低值Ld之间的差是否足够的确定值。
图14是说明用于调整传感器6的放大率(传感器放大率)的放大率调整处理的流程图。
首先,CPU201初始化数据处理区域以确保用于处理传感器单元6的输出数据的区域(步骤S41),并且设定传感器的放大率的初始值(步骤S42)。传感器的通过之前的放大率调整处理调整的放大率储存在EEPROM6g中,并且将该储存的放大率设定为初始值。当没有储存该放大率时,将预定放大率设定为初始值。在这种情况下,可以根据通过操作面板28提前输入的卷筒R的类型、缠绕直径、宽度等设定放大率的初始值。可以在打印设备主体中设置或可以通过以有线或无线的方式连接到打印设备的诸如个人电脑的终端中的驱动器设置卷筒R的卷绕直径和宽度。此外,可以安装温度/湿度传感器,并且可以根据设置卷筒R时的环境温度和环境湿度来设定放大率的初始值。
然后,CPU201使卷筒R沿箭头C2的方向进行一次以上的转动,在此时获取传感器输出(步骤S43),并且根据传感器输出评价卷筒R的各预定转动角度的移动平均值(步骤S44)。在本示例的情况中,CPU201获得卷筒R转动两次的传感器输出并且评价卷筒R的各预定转动角度的移动平均值。提取移动平均数据的最高值Hd与最低值Ld(步骤S45),并且确定最高值Hd是否等于或大于图13中的上限确定值THmax(步骤S46)。当最高值Hd等于或大于上限确定值THmax时,CPU201确定发光单元6c的发光强度的放大率是否在预定范围内(第一允许范围内)(步骤S47)。当发光单元6c的发光强度的放大率在预定范围内时,CPU201减小发光强度的放大率(步骤S48)。当发光单元6c的发光强度的放大率在预定范围之外时,CPU201减小受光单元6d的受光强度的放大率(步骤S49)。因此,能够防止传感器输出饱和的情况。
另一方面,当最高值Hd小于上限确定值THmax时,CPU201确定最低值Ld是否小于下限确定值THmin(步骤S50)。当最低值Ld小于下限确定值THmin时,CPU201确定发光单元6c的发光强度的放大率是否在预定范围内(步骤S51)。当发光单元6c的发光强度的放大率在预定范围内时,CPU201增大发光强度的放大率(步骤S52)。当发光单元6c的发光强度的放大率在预定范围外时,CPU201增大受光单元6d的受光强度的放大率(步骤S53)。因此,能够增大传感器单元6的检测灵敏度。
当最低值Ld等于或大于下限确定值THmin时,CPU201确定最高值Hd与最低值Ld之间的差(Hd-Ld)是否小于预定确定值(步骤S51)。当差(Hd-Ld)小于预定确定值时,传感器输出可能受到平稳噪声的影响,并且可能难以检测片材1的前端部的位置。在这种情况下,该处理从步骤S54继续到步骤S51,以便增大传感器单元6的发光强度或受光强度的放大率。当差(Hd-Ld)等于或大于预定确定值时,传感器单元6的发光强度和受光强度的放大率被确定为适当调整,放大率调整处理结束。
在步骤S48、步骤S49、步骤S52或步骤S53中调整发光强度的放大率或受光强度的放大率之后,CPU201确定放大率是否为预定范围内的放大率(步骤S55)。换言之,确定发光强度的放大率是否在预定范围内(第一允许范围内)以及确定受光强度的放大率是否在预定范围内(第二允许范围内)。当发光强度的放大率和受光强度的放大率在预定范围内时,处理返回到之前的步骤S41,以便再次检查放大率是否合适。当发光强度的放大率和受光强度的放大率不是预定范围内的放大率时,放大率被确定为超过调整极限,并且执行诸如错误显示的输出的错误处理。在发光强度的放大率和受光强度的放大率变为预定范围内的放大率的情况下,可以对在步骤S48、步骤S49、步骤S52或步骤S53中的放大率的增大或减小的次数进行计数,并且当计数值等于或大于预定次数时可以执行错误处理。
如上所述,在本实施方式中,能够在卷筒R进行一次以上反转时通过基于传感器输出调整传感器单元6的发光强度和受光强度的放大率来优化传感器单元6的输出。因此,能够可靠地指定具有不同反射率等的各种片材1的前端部的位置。
(第四实施方式)
图15A至图17B时说明本发明的第四实施方式的图。
图15A和图15B是说明配置于片材供给设备200的臂构件4的传感器单元6的位置的图,图15A示出了设置有具有大卷绕直径的卷筒R的示例,图15B示出了设置有具有小卷绕直径的卷筒R的示例。在本实施方式中,传感器单元6无论如图15A和图15B所示的卷筒R的卷绕直径大还是小都被设置为满足公式(1)的位置关系。另外,当卷筒R被构造成片材1绕着诸如纸管等的管卷绕,仅设置诸如纸管的管,即使当卷筒R具有最小卷绕直径,也保持以下公式(1)的位置关系。
α>β(α1>β1,α2>β2)(1)
α1表示图15A中卷筒R抵接分离挡板10的位置P1(卷筒R上的上引导件的抵接位置)与卷筒R抵接驱动转动体8的位置P2(卷筒上的下引导件的抵接位置)之间的距离。此外,α2表示图15B中的位置P1与位置P2之间的距离。距离α1和α2统称为“距离α”。传感器单元6的检测位置是传感器单元6的检测部的能够检测片材1的前端部的位置并且对应于例如发光单元6c和受光单元6d的位置的位置。β1表示图15A中的传感器单元6的检测位置与位置P2之间的距离,β2表示图15B中的传感器单元6的检测位置与位置P2之间的距离。距离β1和β2统称为“距离β”。
传感器单元6安装于臂构件4上的位置处以满足如图15A所示的距离β1小于距离α1的条件,以及满足如图15B所示的距离β2小于距离α2的条件。换言之,传感器单元6无论卷筒R的卷绕半径如何都被安装成满足关系α>β。
图16A和图16B是传感器单元6中的发光单元6c的发光光轴的说明图,图16A示出了设置有具有大卷绕直径的卷筒R的示例,图16B示出了设置有具有小卷绕直径的卷筒R的示例。图16A中的发光单元6c的发光光轴I1与向量Q1之间的角度γ1以及图16B中的发光单元6c的发光光轴I2与向量Q2之间的角度γ2两者均满足公式(2)的关系。
0°<γ(γ1,γ2)<90°(2)
向量Q1是沿着光轴I1与卷筒R之间的交叉点P3处的切线指向卷筒R的正转方向(箭头C1的方向)的向量。类似地,向量Q2是沿着光轴I2与卷筒R之间的交叉点P3处的切线指向卷筒R的正转方向的向量。光轴I1和I2统称为“光轴I”,向量Q1和Q2统称为向量“Q”,角度γ1和γ2统称为“角度γ”。
如上所述,传感器单元6被配置为使得通过将光轴I(I1,I2)延伸到卷筒R的内部而获得的假想线与向量Q(Q1,Q2)之间的角度γ(γ1,γ2)为锐角。
图17A和图17B是传感器单元6中的发光单元6c与受光单元6d之间的配置关系的说明图。图17A是沿X轴方向观察的片材供给设备200的主要部分的图,图17B是沿Z轴方向观察的主要部分的图。
在本实施方式中,发光单元6c和受光单元6d沿卷筒R的轴线方向(X轴方向)并排配置。因为发光单元6c和受光单元6d沿卷筒R的轴线方向并排配置,所以发光单元6c的发光光轴和受光单元6d的受光光轴沿卷筒R的轴线方向大致彼此面对。因为发光单元6c和受光单元6d如上所述地配置,所以无论卷筒R的卷绕直径大还是小都能够检测片材1的前端部与传感器单元6之间的距离。换言之,随着卷筒R反转当片材1的前端部经过分离挡板10的从动辊10a并且随后由于其自重落到臂构件4上时能够检测片材1的前端部。
此外,因为角度γ被设定为锐角,所以在随着卷筒R反转片材1的前端部由于其自重落到臂构件4上之后、直到片材1的前端部越过传感器单元6,存在如下状态:在发光光轴I与片材1的前端部的正面之间形成直角。在直角的状态下,从发光单元6c照射并被片材1的前端部反射的反射光作为最强正反射光被受光单元6d检测到。此外,因为落有片材1的前端部的臂构件4的表面与发光光轴I之间的角度被设定为90°,所以当片材1的前端部变为沿着臂构件4的形状时,发光光轴I和片材1的前端部的正面形成直角。
如上所述,片材1的前端部由于其自重落到臂构件4之后直到片材1的前端部越过传感器单元6,存在受光单元6d接收最强正反射光的状态。因此,当片材1的前端部由于其自重落到臂构件4上时,传感器单元6的传感器输出高度可靠地变为H电平,并且能够获取高度可靠地指定片材1的前端部的位置所必须的传感器输出。
此外,发光单元6c和受光单元6d沿卷筒R的轴线方向并排配置使得发光光轴和受光光轴大致彼此面对。因此,能够减少或抑制片材1的类型、卷筒R的卷绕直径的改变、片材1的前端部的行为的改变等对于传感器输出的影响。此外,在一系列的传感器输出中,能够通过增大受光单元6d接收正反射光时传感器输出的比例来减少或抑制由外部光产生的影响。在不满足公式(1)和(2)的关系而满足α<β和γ>90°的情况下,传感器单元6的光轴指向分离挡板10,不能获取与片材1的前端部的间隔对应的传感器输出。
设置传感器单元6的位置不限于臂构件4,而可以鉴于传感器单元6的光学特性等将传感器单元6设置于除了臂构件4之外的位置处。
(第五实施方式)
图18A和图18B是本发明的第五实施方式中的片材供给设备200的构造的说明图。图18A示出了设置有具有大卷绕直径的卷筒R的示例,图18B示出了设置有具有小卷绕直径的卷筒R的示例。
在本实施方式中,臂构件4以及沿着卷筒R与驱动转动体8之间的接触点处的切线指向卷筒R的正转方向的向量W(W1,W2)之间的关系被指定。换言之,供给设备200被构造成无论卷筒R的卷绕直径大还是小在向量W(W1,W2)与臂构件4的表面之间都存在有交叉点P4。此外,交叉点P4在输送方向上定位成比传感器单元6的发光光轴I与臂构件4的表面的交叉点5靠片材1的上游侧(图18A和图18B中的左侧)。
因为供给设备200被如上所述地构造,所以当片材1随着卷筒R沿箭头C1的方向正转而被输送时,片材1的前端部沿着向量W朝向臂构件4移动。因此,无论卷筒R的卷绕直径大还是小,片材1的前端部都在与臂构件4接触的同时被输送。此外,因为交叉点P4在输送方向上定位成比交叉点P5靠上游侧,所以无论卷筒R的卷绕直径大还是小片材1的前端部在片材1的前端部的输送处理中都越过传感器单元6。因此,无论卷筒R的卷绕直径大还是小,传感器单元6都能够可靠地检测与片材1的前端部的间隔。
(第六实施方式)
图19A至图21是本发明的第六实施方式的说明图。图19A是传感器单元6的输出波形的说明图。图19B是片材1的前端部与卷筒R的外周面适当分离的状态的说明图,图19C是由于静电等的影响片材1的前端部与卷筒R的外周面的分离量小的状态的说明图。图20A、图20B和图20C是在图19C的状态下当卷筒R沿箭头C1的方向正转时的说明图。图21是说明本实施方式中的片材前端设置处理(自动加载)的流程图。
如图19B所示,当片材1的前端部与卷筒R的外周面适当分离时,传感器单元6的传感器输出以图19A中的波形W1改变。换言之,在片材1的前端部靠近从动辊10a的状态下,卷筒R开始沿箭头C2的方向反转,并且当卷筒R转动大约45°时,片材1的前端部经过从动辊10a并掉落。因此,传感器输出从L电平改变到H2电平。此外,当卷筒R在转动开始之后转动大约90°时,随着片材1的前端部如图19B所示越过传感器单元6,传感器输出从H电平改变到L电平。此后,因为卷筒R沿箭头C1的方向正转,所以片材1的前端部能够被自动插入片材供给路径并且被给送。
另一方面,当片材1的前端部的分离量如图19C所示地小时,传感器单元6的传感器输出以图19A中的波形W2改变。换言之,在片材1的前端部靠近从动辊10a的状态下,卷筒R开始沿箭头C2的方向反转,并且当卷筒R转动大约45°时,片材1的前端部经过从动辊10a并掉落。此外,当卷筒R在转动开始之后转动大约90°时,随着片材1的前端部如图19C所示越过传感器单元6,传感器输出从H电平改变到L电平。此后,当卷筒R沿箭头C1的方向正转时,因为片材1的前端部的分离量如图20A所示地小,所以片材1的前端部可能如图20B所示与从动辊10a碰撞,并且片材1可能如图20C所示卡住。图20A示出了片材1的前端部分离的状态。图20B示出了片材1的前端部与从动辊10a碰撞的状态。图20C示出了片材1卡住的状态。
图21是本实施方式中的片材前端设置处理(自动加载)的流程图。由相同的步骤附图标记表示与第一实施方式的图8的流程图中的处理相同的处理,并且省略相同的处理的说明。
CPU确定卷筒R是否被设置(图6中的步骤S1)。在卷筒R被设置之后,CPU201切换到臂构件4被“强压力”沿箭头A1的方向压的状态(强夹持状态)(图6中的步骤S2)。
在片材前端设置处理中,CPU201使卷筒R沿箭头C2的相反方向转动(反转)一次以上(步骤S11)。
在卷筒R反转时,当传感器单元6的传感器输出从H电平改变到L电平时CPU201获得改变量(电平改变量),并且确定该电平改变量是否超过预定阈值ΔH1(=H1-L)(步骤S61)。当电平改变量不大于预定阈值ΔH1(=H1-L)时,即使卷筒R进行一次以上反转,片材1的前端部也被确定为不与卷筒R的外周面分离,并且处理继续到步骤S17。在步骤S17中,促使使用者进行将片材1的前端部插入片材供给路径的手动操作。因此,阈值ΔH1是用于确定片材1的前端部是否与卷筒R的外周面分离的标准。在图19A中,L表示传感器输出的最低电平。
当传感器输出的电平改变量大于阈值ΔH1时,CPU201确定片材1的前端部与卷筒R的外周面分离,如图19B或图19C所示。然后,当传感器输出的L电平继续一定时间段时,卷筒R的转动停止(步骤S13和步骤S14)。此后,CPU201确定传感器输出的电平改变量是否大于预定阈值ΔH2(=H2-L)(步骤S62)。当电平改变量大于阈值ΔH2时,片材1的前端部被确定为与卷筒R的外周面适当分离,如图19B所示,并且执行自动加载(步骤S15)。另一方面,当电平改变量不大于阈值ΔH2时,片材1的前端部与卷筒R的外周面的分离量被确定为小,如图19C所示。然后,确定片材1的刚性是否等于或大于预定值(步骤S63)。例如基于由使用者输入的与片材1的类型相关的信息确定片材1的刚性。除了与片材1的类型相关的信息之外,可以根据片材1的宽度尺寸、片材1的使用状态、打印设备的使用环境等设定用于确定片材1的刚性的标准。当片材1的刚性等于或大于预定值时,处理继续到步骤S15,并执行自动加载。另一方面,当片材1的刚性小于预定值时,处理继续到步骤S17,促使使用者进行将片材1的前端部插入片材供给路径的手动操作。
如上所述,基于传感器单元6的传感器输出检测片材1的前端部的分离量,并且在片材1的分离量和刚性满足预定条件时执行自动加载。因此,能够防止片材1在打印设备中卡住。
(第七实施方式)
图22和图23是本发明的第七实施方式的说明图。在本实施方式中,当片材1的前端部未自动给送到片材供给路径中时,也就是,当不能进行自动加载时,片材1的前端部位于用于手动片材给送的预定范围内。图22是片材1的前端部的停止位置的说明图,图23是说明本实施方式中的片材前端设置处理(自动加载)的流程图。
当片材1的前端部未自动给送到片材供给路径中时,如图22所示,卷筒R沿箭头C2的方向反转使得片材1的前端部位于从动辊10a与驱动转动体9之间的范围θ1内(可视范围内)。范围θ1包括当卷筒R安装到打印设备或从打印设备拆卸时使用者可见的卷筒R的周面的范围。因为片材1的前端部位于范围θ1内,所以使用者视觉上识别片材1的前端部并将片材1的前端部插入片材供给路径的手动操作的可操作性被改善。
在本实施方式的片材前端设置处理中,如图23所示,加入用于使片材1的前端部停止在预定范围θ1内的位置处的操作(步骤S71)。在步骤S63中,当片材1的刚性小于预定值时,CPU201使卷筒R沿箭头C2的方向反转,使得片材1的前端部位于范围θ1内。此后,处理继续到步骤S17,促使使用者进行将片材1的前端部插入片材供给路径的手动操作。
如上所述,因为片材1的前端部位于使用者能够观察到的预定范围内,所以能够改善片材1的前端部对使用者的可视性。此外,当由面板等的显示唤起使用者的注意力时,使用者能够将片材1的前端部平顺地插入片材供给路径。因此,使用者能够容易地进行手动片材给送。
在本示例中,从片材1的前端部对使用者的可视性的观点出发,如图22所示,片材1的前端部的停止位置被决定为在从动辊10a与驱动转动体9之间的范围θ1内。然而,例如为了减少卷筒R的转动量并减少插入片材1的前端部的手动操作所需要的时间,片材1的前端部可以停止在从动辊10a与驱动转动体9之间的与范围θ1不同的范围内。
(变形例)
作为传感器单元6,能够使用除了光学传感器之外的距离传感器,只要传感器具有根据离片材的距离而改变的输出值即可。例如,能够使用以非接触方式检测离物体的距离的诸如超声波传感器和静电传感器的距离传感器。
打印设备不限于包括对应于两个卷筒片材的两个片材供给设备的构造,而可以是包括一个片材供给设备或三个以上片材供给设备的构造。此外,打印设备不仅限于喷墨打印设备,只要能够在从片材供给设备供给的片材上打印图像即可。此外,打印设备的打印系统和构造也是任意的。例如,可以采用重复打印头的扫描和片材输送操作以打印图像的串行扫描系统或者将片材连续输送到与长打印头相对的位置以打印图像的全幅系统。
此外,本发明能够应用于除了将用作打印介质的片材供给至打印设备的片材供给设备之外的各种片材供给设备。例如,本发明能够应用于将读取目标片材供给至诸如扫描器或复印机的读取设备的设备、将片材状加工材料供给至诸如切割设备的加工设备的设备。这种片材供给设备可以被构造成与诸如打印设备、读取设备或加工设备的设备分离并且可以包括用于片材供给设备的控制单元(CPU)。
如图24A和图24B所示,片材供给设备可以被构造成驱动转动体8和9以及传感器单元6配置于设置在卷筒R的下侧的固定结构4’,并且无论卷筒R的卷绕直径如何,卷筒R由于卷筒R的自重都与驱动转动体8和9压力接触。此外,可以使用驱动机构(未示出)使卷筒R与驱动转动体8和9压力接触。
本发明能够广泛地应用于供给包括纸、膜、布等的各种片材的供给设备,并且应用于诸如包括这种供给设备的打印设备和图像扫描设备的各种片材处理设备。图像扫描设备扫描通过扫描头从供给设备供给的片材的图像。此外,片材处理设备不仅限于打印设备和图像扫描设备,只要能够在从供给设备供给的片材上进行各种处理(加工、涂布、照射、检查等)即可。在片材供给设备被构造为独立的设备的情况下,该设备能够配备有包括CPU的控制单元。在片材供给设备安装于片材处理设备的情况下,供给设备和片材处理设备中的至少一者能够配备有包括CPU的控制单元。
虽然已经参照示例性实施方式说明了本发明,但是应当理解,本发明不限于所公开的示例性实施方式。权利要求书的范围应符合最宽泛的解释,以包括所有这样的变型、等同结构和功能。
- 单色喷墨打印设备及其方法和将彩色喷墨打印设备转换为单色喷墨打印设备的方法
- 用于3D打印设备的粉末自动供给装置及3D打印设备