一种用于人工智能机器人的保护设备
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及人工智能机器人技术领域,具体为一种用于人工智能机器人的保护设备。
背景技术
智能机器人之所以叫智能机器人,这是因为它有相当发达的大脑,在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系,最主要的是,这样的计算机可以进行按目的安排的动作,正因为这样,我们才说这种机器人才是真正的机器人,尽管它们的外表可能有所不同,但是目前使用的人工智能机器人保护装置,密封效果差、缓冲效果差,从而因内部的减震效果差加上外部的密封效果对内部容易造成损坏,容易导致智能机器人出现故障,从而现推出一种智能制造的人工智能机器人的保护设备。
为解决上述问题,发明者提供了一种用于人工智能机器人的保护设备,通过拉伸弹簧不断的将平衡支架恢复至原始的位置,从而达到了密封性的效果,通过转动块带来的力分散到自身的伸缩杆上,在保护内壳上不断地进行升降,分散内部带来的冲击力,从而达到了减震缓冲的效果,通过内圈固定板固定安装在保护外壳的外围,此时内圈固定板会稳固住保护外壳,固定挡板会抵靠在设备主体上,从而达到了稳固设备的效果。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种用于人工智能机器人的保护设备,具备密封效果和缓冲效果好优点,解决了密封效果差、缓冲效果差的问题。
(二)技术方案
为实现上述密封效果和缓冲效果好目的,本发明提供如下技术方案:一种用于人工智能机器人的保护设备,包括设备主体,所述设备主体的正面固定安装有保护机构,所述保护机构的内部固定连接有减震机构,所述保护机构的外围固定安装有压紧机构。
优选的,所述保护机构包括保护外壳、卡扣凹槽板、升降块、限制齿、滑槽、拉伸弹簧、平衡支架、螺纹套、转动螺杆,所述保护外壳的右端固定安装有卡扣凹槽板,所述保护外壳的底部固定连接有升降块,所述升降块的正面转动连接有限制齿,所述保护外壳远离卡扣凹槽板的一端固定安装有滑槽,所述滑槽的内部固定连接有拉伸弹簧,所述滑槽的正面滑动连接有平衡支架,所述平衡支架远离滑槽的一端转动连接有螺纹套,所述螺纹套的内部转动连接有转动螺杆。
优选的,所述卡扣凹槽板的内壁设置有向上的斜齿,在卡扣凹槽板向下与限制齿相互啮合后,因为开口凹槽板内壁的斜齿为向上的,所以在保护外壳受力时,限制齿不会脱离卡扣凹槽板。
优选的,所述减震机构包括减震底板、保护内壳、伸缩支架、转动块、减震内壳,所述减震底板的正面固定安装有保护内壳,所述保护内壳的正面转动连接有伸缩支架,所述伸缩支架远离保护内壳的一端转动连接有转动块,所述转动块的底部固定安装有减震内壳。
优选的,所述伸缩支架靠近保护内壳的一端宽,靠近转动块的一端窄,伸缩支架会在转动块向上运动时,进行不断地伸缩。
优选的,所述压紧机构包括内圈固定板、转动支架、转动把手、复位弹簧、固定挡板,所述内圈固定板的底部转动连接有转动支架,所述转动支架远离内圈固定板的一端转动连接有转动把手,所述内圈固定板的底部固定安装有复位弹簧,所述复位弹簧远离内圈固定板的一端固定连接有固定挡板。
优选的,所述内圈固定板的底部固定安装在保护外壳的外围。
(三)有益效果
与现有技术相比,本发明提供了一种用于人工智能机器人的保护设备,具备以下有益效果:
1、该用于人工智能机器人的保护设备,通过限制齿会将卡扣凹槽板内壁的斜齿进行啮合,在设备主体内部受力时,右端的限制齿会将卡扣凹槽板内壁的斜齿机械卡死,保护外壳左端的平衡支架会在滑槽的正面不断地滑动,拉伸弹簧不断的将平衡支架恢复至原始的位置,从而达到了密封性的效果。
2、该用于人工智能机器人的保护设备,通过减震底板正面的减震内壳受到内部带来的冲击力时,减震内壳会将所受到的力传递到转动块上,而在转动块两端的伸缩支架,将转动块带来的力分散到自身的伸缩杆上,在保护内壳上不断地进行升降,分散内部带来的冲击力,从而达到了减震缓冲的效果。
3、该用于人工智能机器人的保护设备,通过设备主体上的转动把手转动,带动两端的转动支架进行反向转动,带动上下两端的内圈固定板以及固定挡板,内圈固定板固定安装在保护外壳的外围,此时内圈固定板会稳固住保护外壳,固定挡板会抵靠在设备主体上,从而达到了稳固设备的效果。
附图说明
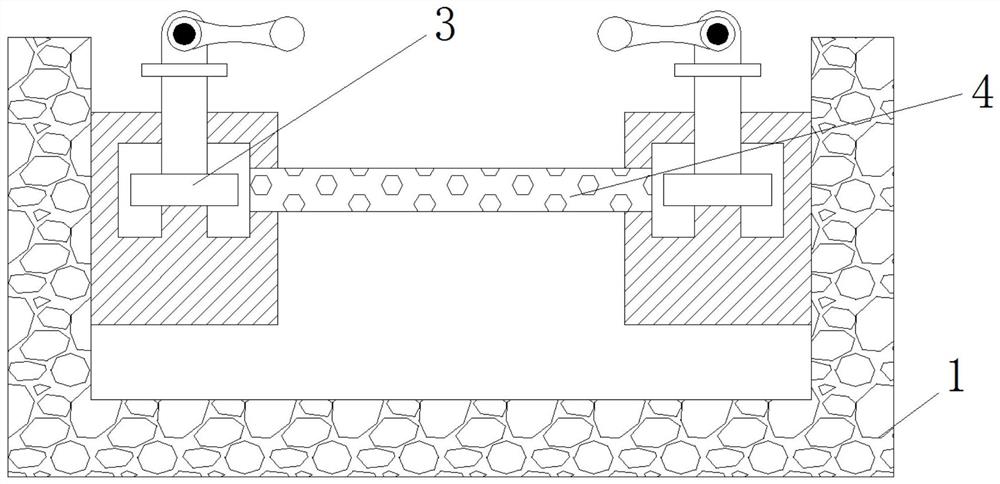
图1为本发明正面结构示意图;
图2为本发明俯视结构示意图;
图3为本发明保护机构及其连接结构示意图;
图4为本发明减震机构及其连接结构示意图;
图5为本发明压紧机构及其连接结构示意图。
图中:1、设备主体;2、保护机构;21、保护外壳;22、卡扣凹槽板;23、升降块;24、限制齿;25、滑槽;26、拉伸弹簧;27、平衡支架;28、螺纹套;29、转动螺杆;3、减震机构;31、减震底板;32、保护内壳;33、伸缩支架;34、转动块;35、减震内壳;4、压紧机构;41、内圈固定板;42、转动支架;43、转动把手;44、复位弹簧;45、固定挡板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一:
请参阅图1-3,一种用于人工智能机器人的保护设备,包括设备主体1,设备主体1的正面固定安装有保护机构2,保护机构2包括保护外壳21、卡扣凹槽板22、升降块23、限制齿24、滑槽25、拉伸弹簧26、平衡支架27、螺纹套28、转动螺杆29,保护外壳21的右端固定安装有卡扣凹槽板22,卡扣凹槽板22的内壁设置有向上的斜齿,保护外壳21的底部固定连接有升降块23,升降块23的正面转动连接有限制齿24,保护外壳21远离卡扣凹槽板22的一端固定安装有滑槽25,滑槽25的内部固定连接有拉伸弹簧26,滑槽25的正面滑动连接有平衡支架27,平衡支架27远离滑槽25的一端转动连接有螺纹套28,螺纹套28的内部转动连接有转动螺杆29,保护机构2的内部固定连接有减震机构3,保护机构2的外围固定安装有压紧机构4,通过保护外壳21左端的平衡支架27会在滑槽25的正面不断地滑动,拉伸弹簧26不断的将平衡支架27恢复至原始的位置,从而达到了密封性的效果。
实施例二:
请参阅图4,一种用于人工智能机器人的保护设备,包括设备主体1,设备主体1的正面固定安装有保护机构2,保护机构2的内部固定连接有减震机构3,减震机构3包括减震底板31、保护内壳32、伸缩支架33、转动块34、减震内壳35,减震底板31的正面固定安装有保护内壳32,保护内壳32的正面转动连接有伸缩支架33,伸缩支架33靠近保护内壳32的一端宽,靠近转动块34的一端窄,伸缩支架33远离保护内壳32的一端转动连接有转动块34,转动块34的底部固定安装有减震内壳35,保护机构2的外围固定安装有压紧机构4,通过转动块34带来的力分散到自身的伸缩杆上,在保护内壳32上不断地进行升降,分散内部带来的冲击力,从而达到了减震缓冲的效果。
实施例三:
请参阅图5,一种用于人工智能机器人的保护设备,包括设备主体1,设备主体1的正面固定安装有保护机构2,保护机构2的内部固定连接有减震机构3,保护机构2的外围固定安装有压紧机构4,压紧机构4包括内圈固定板41、转动支架42、转动把手43、复位弹簧44、固定挡板45,内圈固定板41的底部转动连接有转动支架42,内圈固定板41的底部固定安装在保护外壳21的外围,转动支架42远离内圈固定板41的一端转动连接有转动把手43,内圈固定板41的底部固定安装有复位弹簧44,复位弹簧44远离内圈固定板41的一端固定连接有固定挡板45,通过内圈固定板41固定安装在保护外壳21的外围,此时内圈固定板41会稳固住保护外壳21,固定挡板45会抵靠在设备主体1上,从而达到了稳固设备的效果。
实施例四:
请参阅图1-5,一种用于人工智能机器人的保护设备,包括设备主体1,设备主体1的正面固定安装有保护机构2,保护机构2包括保护外壳21、卡扣凹槽板22、升降块23、限制齿24、滑槽25、拉伸弹簧26、平衡支架27、螺纹套28、转动螺杆29,保护外壳21的右端固定安装有卡扣凹槽板22,卡扣凹槽板22的内壁设置有向上的斜齿,保护外壳21的底部固定连接有升降块23,升降块23的正面转动连接有限制齿24,保护外壳21远离卡扣凹槽板22的一端固定安装有滑槽25,滑槽25的内部固定连接有拉伸弹簧26,滑槽25的正面滑动连接有平衡支架27,平衡支架27远离滑槽25的一端转动连接有螺纹套28,螺纹套28的内部转动连接有转动螺杆29,保护机构2的内部固定连接有减震机构3,减震机构3包括减震底板31、保护内壳32、伸缩支架33、转动块34、减震内壳35,减震底板31的正面固定安装有保护内壳32,保护内壳32的正面转动连接有伸缩支架33,伸缩支架33靠近保护内壳32的一端宽,靠近转动块34的一端窄,伸缩支架33远离保护内壳32的一端转动连接有转动块34,转动块34的底部固定安装有减震内壳35,保护机构2的外围固定安装有压紧机构4,压紧机构4包括内圈固定板41、转动支架42、转动把手43、复位弹簧44、固定挡板45,内圈固定板41的底部转动连接有转动支架42,内圈固定板41的底部固定安装在保护外壳21的外围,转动支架42远离内圈固定板41的一端转动连接有转动把手43,内圈固定板41的底部固定安装有复位弹簧44,复位弹簧44远离内圈固定板41的一端固定连接有固定挡板45。
工作原理:在使用该设备时,先将保护外壳21的左端进行安装,将螺纹套28转动连接到转动螺杆29上,通过平衡支架27连接上下两端的保护外壳21,保护外壳21右端只需按下卡扣凹槽板22即可,限制齿24会将卡扣凹槽板22内壁的斜齿进行啮合,在设备主体1内部受力时,右端的限制齿24会将卡扣凹槽板22内壁的斜齿机械卡死,保护外壳21左端的平衡支架27会在滑槽25的正面不断地滑动,拉伸弹簧26不断的将平衡支架27恢复至原始的位置,从而达到了密封性的效果,在减震底板31正面的减震内壳35受到内部带来的冲击力时,减震内壳35会将所受到的力传递到转动块34上,而在转动块34两端的伸缩支架33,将转动块34带来的力分散到自身的伸缩杆上,在保护内壳32上不断地进行升降,分散内部带来的冲击力,从而达到了减震缓冲的效果,在稳固保护外壳21时,通过设备主体1上的转动把手43转动,带动两端的转动支架42进行反向转动,带动上下两端的内圈固定板41以及固定挡板45,内圈固定板41固定安装在保护外壳21的外围,此时内圈固定板41会稳固住保护外壳21,固定挡板45会抵靠在设备主体1上,从而达到了稳固设备的效果。
该用于人工智能机器人的保护设备,通过限制齿24会将卡扣凹槽板22内壁的斜齿进行啮合,在设备主体1内部受力时,右端的限制齿24会将卡扣凹槽板22内壁的斜齿机械卡死,保护外壳21左端的平衡支架27会在滑槽25的正面不断地滑动,拉伸弹簧26不断的将平衡支架27恢复至原始的位置,从而达到了密封性的效果。
该用于人工智能机器人的保护设备,通过减震底板31正面的减震内壳35受到内部带来的冲击力时,减震内壳35会将所受到的力传递到转动块34上,而在转动块34两端的伸缩支架33,将转动块34带来的力分散到自身的伸缩杆上,在保护内壳32上不断地进行升降,分散内部带来的冲击力,从而达到了减震缓冲的效果。
该用于人工智能机器人的保护设备,通过设备主体1上的转动把手43转动,带动两端的转动支架42进行反向转动,带动上下两端的内圈固定板41以及固定挡板45,内圈固定板41固定安装在保护外壳21的外围,此时内圈固定板41会稳固住保护外壳21,固定挡板45会抵靠在设备主体1上,从而达到了稳固设备的效果。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种用于人工智能机器人的保护设备
- 一种用于人工智能机器人的多状态测试平台