控制装置
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及一种用于控制车辆的控制装置。
背景技术
近年来,提供对可持续运输系统的使用的努力变得活跃,这些系统考虑了处于弱势地位的交通参与者。作为这些努力之一,为了进一步改善交通的安全性、便利性,进行了与汽车等车辆中的驾驶辅助技术、自动驾驶技术相关的研究开发。作为驾驶辅助技术的一例,抑制车辆从行驶道路偏移的车辆偏移抑制系统(RDM:Road Departure Mitigation)被提出。
在下述专利文献1中公开了如下技术:在作为规定时间内的从行驶道路偏移的次数而计数了n次(其中,n为大于1的自然数)的情况下,执行至少通过转向来避免从行驶道路偏移的偏移避免控制和警报输出控制中的至少任意1个。
现有技术文献
专利文献
专利文献1:日本特开2015-210680号公报
发明内容
发明要解决的课题
在现有技术中,例如在进入路旁的店铺或者靠近路肩等驾驶员有意地使车辆向行驶道路外(以下也称为“车道外”)行进的情况下,有时RDM也会启动且输出警报等,驾驶员可能会对这样过度启动的RDM感到厌烦。
本发明提供一种控制装置,其能够减少可能使驾驶员感到厌烦的过度通知。
用于解决课题的手段
本发明的一个方式如下:
一种控制装置,其对车辆进行控制,该车辆具备:外界传感器,其获取本车辆的周边信息;驾驶状况传感器,其获取表示本车辆的驾驶员的驾驶状况的驾驶状况信息;以及通知装置,其能够执行对所述驾驶员的通知,其中,
所述控制装置具备:
划分线识别部,其基于由所述外界传感器获取的所述周边信息来识别对所述车辆所行驶的行驶道路的左右进行划分的划分线;
偏移预测部,其基于所述车辆相对于由所述划分线识别部识别出的所述划分线的位置和姿势,来推定所述车辆从所述行驶道路偏移的可能性的高低;以及
控制部,其基于由所述偏移预测部推定的从所述行驶道路偏移的可能性的高低、由所述驾驶状况传感器获取的所述驾驶状况信息、以及所述车辆的行进方向上的所述行驶道路的状态,来控制由所述通知装置执行的所述通知,
在所述行进方向上存在曲率半径小于规定值的弯道、从所述行驶道路偏移的可能性高、且所述驾驶员的驾驶状况不适合在所述行驶道路上行驶的情况下,所述控制部执行所述通知。
发明效果
根据本发明,能够提供一种能够抑制可能使驾驶员感到厌烦的过度通知的控制装置。
附图说明
图1是表示本发明一实施方式的车辆的概略结构的框图。
图2是表示该实施方式的控制装置所执行的车道偏移抑制控制开始处理的一例的流程图。
图3是表示该实施方式的控制装置所执行的车道偏移抑制控制结束处理的一例的流程图。
图4是表示驾驶状况判定表的一例的图。
图5是表示容许范围的一例的图。
图6是表示容许范围的其他例子的图。
图7是表示伴随时间经过的车辆1及驾驶员的状态变化的一例的图。
图8是表示驾驶状况判定表的其他例子的图。
图9是表示该实施方式的控制装置所执行的其他处理的一例的流程图。
附图标记说明
1 车辆
2 外部装置
10 传感器组(外界传感器)
16 操作检测部(驾驶状况传感器)
17 乘员摄像头(驾驶状况传感器)
21 触控面板(通知装置)
22 扬声器(通知装置)
30 控制装置
31 划分线识别部
32 偏移预测部
33 控制部
41 转向角传感器(驾驶状况传感器)
42 扭矩传感器(驾驶状况传感器)
46 转向装置(操作部)
48 转向装置接触传感器(驾驶状况传感器)
具体实施方式
以下,参照附图对本发明的控制装置的一实施方式进行说明。需要说明的是,以下,对相同或类似的要素标注相同或类似的附图标记,有时适当省略或简化其说明。
[车辆]
图1所示的本实施方式的车辆1(以下也称为“本车辆”)是具有驱动源和车轮的汽车,该车轮包括由驱动源的动力驱动的驱动轮和能够转向的转向轮(均未图示)。例如,车辆1是具有左右一对前轮和左右一对后轮的四轮汽车。车辆1的驱动源可以是电动机,可以是汽油发动机、柴油发动机等内燃机,也可以是电动机与内燃机的组合。此外,车辆1的驱动源可以驱动左右一对前轮,也可以驱动左右一对后轮,还可以驱动左右一对前轮和左右一对后轮这四个轮。前轮和后轮可以是任意一方能够转向的转向轮,也可以是双方均能够转向的转向轮。
如图1所示,车辆1具备传感器组10、导航装置20、作为本发明的控制装置的一例的控制装置30、EPS系统(电动助力转向系统)40、通信部50、驱动力控制系统60、制动力控制系统70和操作输入部80。
传感器组10获取与车辆1或车辆1的周边相关的各种检测值。由传感器组10获取的检测值用于控制装置30对车辆1进行控制。传感器组10包括前摄像头11a、后摄像头11b、左侧摄像头11c、右侧摄像头11d、前声纳组12a、后声纳组12b、左侧声纳组12c和右侧声纳组12d。这些摄像头、声纳组、雷达、激光雷达等能够作为获取车辆1的周边信息的外界传感器发挥功能。
前摄像头11a、后摄像头11b、左侧摄像头11c和右侧摄像头11d将通过拍摄车辆1的周边而得到的周边图像的图像数据向控制装置30输出。前摄像头11a、后摄像头11b、左侧摄像头11c和右侧摄像头11d拍摄的周边图像分别被称为前方图像、后方图像、左侧方图像和右侧方图像。由左侧方图像和右侧方图像构成的图像也被称为侧方图像。
前声纳组12a、后声纳组12b、左侧声纳组12c和右侧声纳组12d向车辆1周边发射声波,并且接收来自其他物体的反射音。前声纳组12a例如包括4个声纳。构成前声纳组12a的声纳分别设置在车辆1的左斜前方、前方左侧、前方右侧和右斜前方。后声纳组12b例如包括4个声纳。构成后声纳组12b的声纳分别设置在车辆1的左斜后方、后方左侧、后方右侧和右斜后方。左侧声纳组12c例如包括2个声纳。构成左侧声纳组12c的声纳分别设置在车辆1的左侧部前方和左侧部后方。右侧声纳组12d例如包括2个声纳。构成右侧声纳组12d的声纳分别设置在车辆1的右侧部前方和右侧部后方。
此外,在传感器组10中,还具备车轮传感器13a、13b、车速传感器14、惯性测量装置(IMU:Inertial Measurement Unit)15、操作检测部16和乘员摄像头17。车轮传感器13a、13b分别检测车轮(未图示)的旋转角度。车轮传感器13a、13b可以由角度传感器构成,也可以由位移传感器构成。车轮传感器13a、13b在车轮每旋转规定角度时向控制装置30输出检测脉冲。从车轮传感器13a、13b输出的检测脉冲能够用于计算车轮的旋转角度和车轮的旋转速度。基于车轮的旋转角度,能够计算出车辆1的移动距离。车轮传感器13a例如检测左后轮的旋转角度θa。车轮传感器13b例如检测右后轮的旋转角度θb。
车速传感器14检测车辆1(车身)的行驶速度、即车速V,并将检测出的车速V向控制装置30输出。车速传感器14例如基于变速器的中间轴的旋转来检测车速V。
惯性测量装置15检测车辆1的俯仰方向、侧倾方向和横摆方向的各角速度和车辆1的前后方向、左右方向以及上下方向的各加速度,并将这些检测结果向控制装置30输出。此外,在本实施方式中,对设置有惯性测量装置15的例子进行了说明,但本发明不限于此。例如,代替惯性测量装置15,还可以设置检测车辆1的规定方向的加速度的加速度传感器、或者设置检测车辆1的规定方向的角速度的陀螺仪传感器。
操作检测部16检测使用操作输入部80进行的用户的操作内容,并将检测出的操作内容向控制装置30输出。操作输入部80例如可以包括转向灯拨杆(未图示)等,该转向灯拨杆接受使作为车辆1的方向指示器的转向灯点亮的操作。
乘员摄像头17例如将通过以就座于车辆1的驾驶席的乘员(即驾驶员)的面部为中心进行拍摄而得到的图像数据向控制装置30输出。乘员摄像头17是用于获取表示驾驶员的驾驶状况的驾驶状况信息的驾驶状况传感器的一例,具体而言,能够作为用于获取驾驶员的面部或视线的朝向即视野方向的驾驶状况传感器发挥功能。
导航装置20例如使用全球定位系统(GPS:Global Positioning System)来检测车辆1的当前位置,并且将抵达目的地的路径引导给车辆1的用户(例如驾驶员,以下也简称为“用户”)。导航装置20具有具备地图信息数据库的存储装置(未图示)。
导航装置20包括触控面板21和扬声器22。触控面板21能够作为接受针对控制装置30的各种信息的输入的输入装置和由控制装置30控制的显示装置发挥功能。即,用户能够经由触控面板21将各种指令输入到控制装置30。另外,在触控面板21上能够显示用于对用户进行引导和通知的各种信息的画面。此外,扬声器22通过声音向用户输出各种信息。即,触控面板21和扬声器22能够作为能够执行对驾驶员的规定通知的通知装置发挥功能。
控制装置30搭载于车辆1,并且与搭载于车辆1的其他设备以可通信方式连接,通过与该其他设备进行通信来统一控制车辆1整体。控制装置30例如通过具备进行各种运算的处理器、具有存储各种信息的非暂时性存储介质的存储装置、控制控制装置30的内部与外部之间数据的输入输出的输入输出装置等的电子控制单元(ECU:Electronic ControlUnit)来实现。此外,控制装置30可以由一个ECU实现,也可以由多个ECU实现。
作为与控制装置30连接的其他设备(以下,也简称为“其他设备”),能够举出传感器组10所包含的各摄像头/声纳组/传感器、EPS系统40的EPS ECU45、驱动力控制系统60的驱动ECU61、制动力控制系统70的制动ECU71等例。此外,关于EPS ECU45、驱动ECU61和制动ECU71在后面叙述。
控制装置30与其他设备例如经由由布线于车辆1内的各种线束、电缆、连接器等构成的有线通信网而连接。另外,控制装置30与其他设备的通信例如能够采用控制器局域网(CAN:Controller Area Network)、本地互联网络(LIN:Local Interconnect Network)、FlexRay、具有灵活数据速率的控制器局域网(CANFD:CAN with Flexible Data Rate)等。
作为与车辆1相关的控制的一例,控制装置30构成为能够执行抑制车辆1从行驶道路偏移的车道偏移抑制控制,详情后述。车道偏移抑制控制包括:通过规定的通知装置向驾驶员进行车辆1有可能从行驶道路偏移的通知的通知控制;以及以使车辆1不从行驶道路偏移的方式进行辅助转向的转向辅助控制。
在本实施方式中,车辆1有可能从行驶道路偏移的通知通过向触控面板21显示规定的警告图像和从扬声器22输出规定的警报声来进行,但不限于此。例如,也可以在车辆1设置与触控面板21不同的被称为“多信息显示器”的显示装置,通过使该多信息显示器显示警告图像来进行上述通知。
EPS系统40具有转向角传感器41、扭矩传感器42、EPS马达43、旋转变压器44、EPS电子控制装置(EPS ECU)45和转向装置接触传感器48。
转向角传感器41、扭矩传感器42和转向装置接触传感器48能够作为用于获取驾驶员对转向装置46的操作的驾驶状况传感器发挥功能。具体而言,转向角传感器41检测(获取)转向装置46的转向角θst,扭矩传感器42检测(获取)对转向装置46施加的扭矩TQ,转向装置接触传感器48检测(获取)驾驶员有无与转向装置46接触,并将这些检测结果向控制装置30输出。
EPS马达43例如在上述的转向辅助控制时,通过对与转向装置46连结的转向柱47赋予驱动力或者反作用力,能够辅助驾驶员的转向操作。旋转变压器44检测EPS马达43的旋转角度θm。EPS ECU45负责EPS系统40的整体控制。
驱动力控制系统60具备驱动ECU61。驱动力控制系统60执行车辆1的驱动力控制。驱动ECU61例如根据驾驶员对加速踏板(未图示)的操作来控制发动机(未图示)等,由此控制车辆1的驱动力。
制动力控制系统70具备制动ECU71。制动力控制系统70执行车辆1的制动力控制。制动ECU71根据驾驶员对制动踏板(未图示)的操作来控制制动机构(未图示)等,由此控制车辆1的制动力。
通信部50是根据控制装置30的控制,在与设置于车辆1的外部的外部装置2之间进行通信的通信接口。即,控制装置30能够经由通信部50与外部装置2之间进行通信。车辆1与外部装置2的通信例如能够采用蜂窝线路等移动通信网、Wi-Fi(注册商标)、蓝牙(注册商标)等。外部装置2例如由车辆1的制造商管理。此外,外部装置2既可以是在云计算服务中实现的虚拟的服务器(云服务器),也可以是作为1个装置而实现的物理的服务器。
[控制装置]
接着,对控制装置30的一例进行详细说明。如上所述,控制装置30构成为能够执行抑制车辆1从行驶道路偏移的车道偏移抑制控制。例如,控制装置30在车辆1接近(例如接触)对车辆1所行驶的行驶道路的左右进行划分的划分线(例如白线、黄线)的情况下执行车道偏移抑制控制,由此抑制车辆1从行驶道路偏移。由此,抑制车辆1从行驶道路偏移,实现车辆1的安全性的提高。
另一方面,例如在进入路旁的店铺或者靠近路肩等驾驶员有意地使车辆1向车道外行进的情况下,若也执行车道偏移抑制控制,则驾驶员有时会对该车道偏移抑制控制感到厌烦。并且,若这样的使人感到厌烦的车道偏移抑制控制持续下去,则车辆1的商品性可能会降低、或者用户可能会变更设定为不执行车道偏移抑制控制(即设定为不有效利用难得的车道偏移抑制控制)。
因此,控制装置30仅在车辆1的行进方向上存在弯道、车辆1从行驶道路偏移的可能性高、且驾驶员的驾驶状况不适合驾驶车辆1在行驶道路上行驶的情况下,执行车道偏移抑制控制。由此,对于驾驶员主动从行驶道路偏移等难以导致事故的行驶道路偏移,不执行车道偏移抑制控制,从而能够减少可能使驾驶员感到厌烦的过度的车道偏移抑制控制。另一方面,对于在视野差的弯道中从行驶道路偏移这样容易导致事故的偏移,执行车道偏移抑制控制,从而抑制这样的偏移,实现车辆1的安全性的提高。因此,能够在确保车辆1的安全性的同时减少过度的车道偏移抑制控制。
具体而言,控制装置30例如作为通过处理器执行存储于控制装置30的存储装置的程序而实现的功能部、或者通过控制装置30的输入输出装置实现的功能部,具备划分线识别部31、偏移预测部32和控制部33。
划分线识别部31具有基于由传感器组10获取的周边信息来识别对车辆1所行驶的行驶道路的左右进行划分的划分线(例如白线、黄线)的功能。例如,划分线识别部31通过对由前摄像头11a、后摄像头11b、左侧摄像头11c和右侧摄像头11d得到的周边图像进行图像解析,能够识别划分线。
偏移预测部32具有基于车辆1相对于由划分线识别部31识别出的划分线的位置和姿势来推定车辆1从行驶道路偏移的可能性的高低的功能。例如,偏移预测部32计算作为表示车辆1从行驶道路偏移的可能性的高低的指标的车辆1到达划分线所需的时间(TTLC:Time to Line Crossing)。TTLC的值越小,表示车辆1越接近划分线(即车辆1从行驶道路偏移的可能性越高)。此外,由于TTLC的计算方法是公知的,因此在此省略其详细说明。
控制部33具有基于由偏移预测部32推定的从行驶道路偏移的可能性的高低、由乘员摄像头17等驾驶状况传感器获取的驾驶状况信息、以及车辆1的行进方向上的行驶道路的状态来执行车道偏移抑制控制的功能。
在本实施方式中,驾驶状况信息包括表示对转向灯拨杆的操作、驾驶员的视野方向、与转向装置46的接触、转向装置46的转向角θst、对转向装置46施加的扭矩TQ的信息。此外,驾驶状况信息不一定需要包含上述的全部信息。即,驾驶状况信息只要是控制装置30(控制部33)能够以某种程度的精度判定驾驶员的驾驶状况是否符合驾驶车辆1在行驶道路上行驶的信息即可,例如,也可以不包括表示与转向装置46的接触的信息,也可以不包括转向角θst和扭矩TQ中的一方的信息。
另外,在本实施方式中,在作为车辆1的行进方向上的行驶道路的状态而在车辆1的行进方向上存在弯道、作为车辆1从行驶道路偏移的可能性的高低的TTLC小于规定值、且驾驶状况信息所表示的驾驶员的驾驶状况不适合车辆1在行驶道路上行驶的情况下,控制部33执行车道偏移抑制控制。换言之,控制部33在“在车辆1的行进方向上没有弯道”、“TTLC为规定值以上”、以及“驾驶员的驾驶状况适合驾驶车辆1在行驶道路上行驶”这3个条件中的至少任意1个成立的情况下,不执行车道偏移抑制控制。由此,能够减少过度的车道偏移抑制控制。
[控制装置执行的处理]
以下,关于车道偏移抑制控制,对控制装置30执行的具体的处理的一例进行说明。此外,关于车道偏移抑制控制,控制装置30例如能够设定下述3个标志。
1)弯道到达标志:其是表示车辆1到达弯道或者即将到达弯道之前的标志,在车辆1的行驶道路中,在车辆1的行进方向上存在弯道的情况下被设定为开启。2)接近划分线标志:其是表示车辆1接近行驶道路的左右中的一方的划分线的标志,在TTLC小于规定值的情况下被设定为开启。3)驾驶状况非匹配标志:其是表示驾驶员的驾驶状况不适合在行驶道路上行驶的标志,在驾驶员的驾驶状况为规定内容的情况下被设定为开启。
<车道偏移抑制控制开始处理>
首先,参照图2对控制装置30为了开始车道偏移抑制控制而执行的车道偏移抑制控制开始处理的一例进行说明。例如,控制装置30在未执行车道偏移抑制控制时,以规定周期反复执行图2所示的车道偏移抑制控制开始处理。
如图2所示,在车道偏移抑制控制开始处理中,首先,控制装置30判定在车辆1的行驶道路上在车辆1的行进方向上是否存在弯道(步骤S11)。在此,弯道是曲率半径小于规定值的区间。作为弯道处理的条件的规定值能够由车辆1的制造商等适当确定。例如,控制装置30基于由划分线识别部31识别出的划分线,判定在车辆1的行进方向上是否存在弯道。另外,控制装置30也可以基于导航装置20存储的道路信息,判定在车辆1的行进方向上是否存在弯道。另外,此时,控制装置30也可以判定在车辆1的行进方向的规定距离内是否存在弯道。
在车辆1的行进方向上存在弯道的情况下(步骤S11:是),控制装置30将弯道到达标志设为开启(步骤S12),进入步骤S14的处理。另一方面,在车辆1的行进方向上不存在弯道的情况下(步骤S11:否),控制装置30将弯道到达标志设为关闭(步骤S13),进入步骤S14的处理。
接下来,控制装置30计算针对由划分线识别部31识别的划分线的TTLC(步骤S14),并且判定所计算的TTLC是否小于规定值(步骤S15)。在TTLC小于规定值的情况下(步骤S15:是),控制装置30将接近划分线标志设为开启(步骤S16),进入步骤S18的处理。另一方面,在TTLC为规定值以上的情况下(步骤S15:否),控制装置30将接近划分线标志设为关闭(步骤S17),进入步骤S18的处理。此外,成为开启接近划分线标志的条件的规定值能够由车辆1的制造商等适当决定。
接下来,控制装置30基于从乘员摄像头17等驾驶状况传感器获取的驾驶状况信息,判定驾驶员的驾驶状况是否适合在行驶道路上行驶(步骤S18)。在步骤S18的处理中,例如,控制装置30参照所获取的驾驶状况信息和后述的驾驶状况判定表TL,判定驾驶员的驾驶状况是否适合在行驶道路上行驶,详细情况后述。
在驾驶员的驾驶状况不适合在行驶道路上行驶的情况下(步骤S18:否),控制装置30将驾驶状况非匹配标志设为开启(步骤S19),进入步骤S21的处理。另一方面,在驾驶员的驾驶状况适合在行驶道路上行驶的情况下(步骤S18:是),控制装置30将驾驶状况非匹配标志设为关闭(步骤S20),进入步骤S21的处理。
接着,控制装置30判定弯道到达标志、接近划分线标志和驾驶状况非匹配标志的全部标志是否为开启状态(步骤S21)。然后,在全部标志为开启状态的情况下(步骤S21:是),控制装置30开始车道偏移抑制控制(步骤S22),结束本次的车道偏移抑制控制开始处理。另一方面,在至少任意1个标志为关闭的情况下(步骤S21:否),控制装置30直接结束本次的车道偏移抑制控制开始处理。
如以上说明的那样,控制装置30在弯道到达标志、接近划分线标志和驾驶状况非匹配标志的全部标志为开启状态、即“在车辆1的行进方向上存在弯道”、“TTLC小于规定值”、以及“驾驶员的驾驶状况不适合驾驶车辆1在行驶道路上行驶”这3个条件全部成立的情况下,开始车道偏移抑制控制。由此,如上所述,对于驾驶员主动从行驶道路的偏移等难以导致事故的行驶道路偏移,不执行车道偏移抑制控制,另一方面,对于视野差的弯道中的从行驶道路偏移这样容易导致事故的偏移,执行车道偏移抑制控制,能够在确保车辆1的安全性的同时,抑制过度的车道偏移抑制控制。
<车道偏移抑制控制结束处理>
接着,参照图3对控制装置30为了结束车道偏移抑制控制而执行的车道偏移抑制控制结束处理的一例进行说明。例如,控制装置30在执行车道偏移抑制控制时,以规定周期反复执行图3所示的车道偏移抑制控制结束处理。
如图3所示,在车道偏移抑制控制结束处理中,首先,控制装置30判定在车辆1的行进方向上是否没有弯道(步骤S31)。在车辆1的行进方向上依然存在弯道的情况下(步骤S31:否),控制装置30直接结束本次的车道偏移抑制控制结束处理。这样,在不执行后述的步骤S35的处理而结束了车道偏移抑制控制结束处理的情况下,直接继续车道偏移抑制控制。
另一方面,在车辆1的行进方向上没有弯道的情况下(步骤S31:是),控制装置30计算针对由划分线识别部31识别出的划分线的TTLC,判定计算出的TTLC是否为规定值以上(步骤S32)。在步骤S32的处理中使用的规定值可以与在步骤S15的处理中使用的规定值相同,但不限于此。例如,在步骤S32的处理中使用的规定值也可以比在步骤S15的处理中使用的规定值大。
在TTLC小于规定值的情况下(步骤S32:否),控制装置30直接结束本次的车道偏移抑制控制结束处理。另一方面,在TTLC为规定值以上的情况下(步骤S32:是),控制装置30与步骤S18的处理同样地判定驾驶员的驾驶状况是否适合在行驶道路上行驶(步骤S33)。
在驾驶员的驾驶状况不适合在行驶道路上行驶的情况下(步骤S33:否),控制装置30直接结束本次的车道偏移抑制控制结束处理。另一方面,在驾驶员的驾驶状况适合在行驶道路上行驶的情况下(步骤S33:是),控制装置30判定从当前执行的车道偏移抑制控制的开始时起是否经过了规定期间(步骤S34)。
在从当前执行的车道偏移抑制控制的开始时起未经过规定期间的情况下(步骤S34:否),控制装置30直接结束本次的车道偏移抑制控制结束处理。另一方面,在从当前执行的车道偏移抑制控制的开始时起经过了规定期间的情况下(步骤S34:是),控制装置30结束车道偏移抑制控制(步骤S35),结束本次的车道偏移抑制控制结束处理。
如以上说明的那样,控制装置30在“在车辆1的行进方向上没有弯道”、“TTLC为规定值以上”、以及“驾驶员的驾驶状况适合驾驶车辆1在行驶道路上行驶”这3个条件全部成立的情况下,结束车道偏移抑制控制。由此,控制装置30在执行了车道偏移抑制控制的情况下,能够使该车道偏移抑制控制继续直到能够确保车辆1的安全性为止。因此,能够实现车辆1的安全性的提高。
另外,控制装置30也可以在上述3个条件成立的情况下结束车道偏移抑制控制,但在此,在从车道偏移抑制控制的开始时起经过了规定期间的情况下结束了车道偏移抑制控制。例如,当执行车道偏移抑制控制时,则通过警报声等进行对驾驶员的通知,但若该通知在极短时间内结束,则驾驶员无法识别为是来自车道偏移抑制控制的通知,有可能给驾驶员带来不适感(例如警报音被误解为某些异响)。为了避免发生这样的事态,在本实施方式中,从车道偏移抑制控制的开始时起经过了规定期间后,结束车道偏移抑制控制。
[驾驶状况判定表]
接着,参照图4对用于判定驾驶员的驾驶状况是否适合在行驶道路上行驶的驾驶状况判定表的一例进行说明。如图4所示,驾驶状况判定表TL针对每个驾驶状况,存储表示将驾驶状况非匹配标志设定为开启还是关闭的信息(参照图4中的附图标记TL_a~TL_i)。此外,驾驶状况判定表TL例如预先存储于控制装置30的存储装置等控制装置30能够适当访问的存储装置。
例如,在驾驶员操作了转向灯拨杆的情况下(即,使转向灯点亮的情况下)获取的驾驶状况信息包含表示“有”转向灯操作的信息。伴随着转向灯的点亮的车道偏移有很高的可能性是驾驶员主动向车道外偏移。因此,如图4所示,在作为驾驶员的驾驶状况而获取了包含“有”转向灯操作的信息的驾驶状况信息的情况下,控制装置30判断为驾驶员的驾驶状况适合在行驶道路上行驶,将驾驶状况非匹配标志设定为关闭(参照图4中的附图标记TL_a)。
另外,例如,在进行所谓的“旁视驾驶”的情况下获取的驾驶状况信息包含表示驾驶员的视野方向在容许范围外的信息。作为容许范围,以车辆1的行进方向为基准的规定范围(后述)能够被设定为容许范围。驾驶员的视野方向在这样的“容许范围外”的情况下的车道偏移有很高的可能性是由旁视驾驶引起的偏移(即非驾驶员主动进行的偏移)。因此,如图4所示,在作为驾驶员的驾驶状况而获取了包含驾驶员的视野方向在容许范围外的信息的驾驶状况信息的情况下,控制装置30判断为驾驶员的驾驶状况不适合在行驶道路上行驶,将驾驶状况非匹配标志设定为开启(参照图4中的附图标记TL_c、TL_e、TL_g、TL_i)。
另外,例如,在驾驶员未对转向装置46进行适当的为了驾驶车辆1的操作的情况下获取的驾驶状况信息包含表示对转向装置46施加的扭矩TQ小于规定阈值(例如大致为零)、或者转向装置46的转向角θst小于规定阈值(例如大致为零)的信息。换言之,在扭矩TQ或转向角θst小于阈值的情况下,驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高。因此,如图4所示,在作为驾驶员的驾驶状况而获取的包含扭矩TQ或转向角θst小于阈值(图示为“无”)的信息的驾驶状况信息的情况下,即使驾驶员的视野方向处于容许范围内,控制装置30也判定为驾驶员的驾驶状况不适合在行驶道路上行驶,将驾驶状况非匹配标志设定为开启(参照图4中的附图标记TL_f、TL_h)。
另外,在获取到表示未检测到对转向装置46的接触的情况(图示为“无”)的驾驶状况信息的情况下,驾驶员未对转向装置46进行适当的用于驾驶车辆1的操作的可能性也较高。因此,在作为驾驶员的驾驶状况而获取了包含“无”与转向装置46的接触的信息的驾驶状况信息的情况下,即使驾驶员的视野方向在容许范围内,控制装置30也可以判断为驾驶员的驾驶状况不适合在行驶道路上行驶,将驾驶状况非匹配标志设定为开启。
如以上说明的那样,控制装置30(例如控制部33)在以车辆1的行进方向为基准设定的容许范围内不包含视野方向的情况下,判断为驾驶员的驾驶状况不适合在行驶道路上行驶。由此,在驾驶员正在进行观察与车辆1的行进方向完全不同的方向的旁视驾驶的情况下,能够执行对驾驶员的通知,通过该通知能够唤起驾驶员的注意。
另外,在没有对作为接受对车辆1进行转向的操作的操作部的转向装置46的操作的情况下,控制装置30(例如控制部33)判断为驾驶员的驾驶状况不适合在行驶道路上行驶。由此,在驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高的情况下,能够执行对驾驶员的通知,能够通过该通知来唤起驾驶员的注意。
例如,控制装置30(例如控制部33)可以在驾驶员未接触转向装置46的情况下判断为没有针对转向装置46的操作,也可以在针对转向装置46的操作量(即转向角θst)或者对转向装置46施加的力(即扭矩TQ)小于阈值的情况下,判断为没有针对转向装置46的操作。由此,在驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高的情况下,能够执行对驾驶员的通知,能够通过该通知来唤起驾驶员的注意。
另外,即使驾驶员触碰到转向装置46,在转向角θst或扭矩TQ小于阈值的情况下,驾驶员也没有对转向装置46进行适当的操作,驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高。因此,在驾驶员接触转向装置46且对转向装置46的操作量(即转向角θst)或对转向装置46施加的力(即扭矩TQ)小于阈值的情况下,控制装置30(例如控制部33)也可以判断为没有针对转向装置46的操作。这样,在驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高的情况下,能够执行对驾驶员的通知,能够通过该通知来唤起驾驶员的注意。
[容许范围的一例]
如上所述,在作为驾驶员的面部或视线的朝向的视野方向在以车辆1的行进方向为基准设定的容许范围外的情况下(即不包含在容许范围内的情况下),控制装置30判定为驾驶员的驾驶状况不适合在行驶道路上行驶,能够将驾驶状况非匹配标志设定为开启。
容许范围可以始终是一定的范围,但优选根据车辆1的行进方向上的行驶道路的状态来设定。因此,在本实施方式中,控制装置30基于车辆1的行进方向上的行驶道路的状态来设定容许范围。例如,在控制装置30的存储装置等控制装置30能够适当访问的存储装置中,如使用图5后述的那样,预先存储有已定的应根据行驶道路的状态设定的容许范围的信息。并且,控制装置30参照该信息和根据由划分线识别部31识别出的划分线或者导航装置20存储的道路信息等确定出的车辆1的行进方向上的行驶道路的状态,设定与车辆1的行进方向上的行驶道路的状态对应的容许范围。
图5(a)表示在车辆1的行进方向上没有弯道的情况下的容许范围的一例。图5(b)表示在车辆1的行进方向上存在左弯道的情况下的容许范围的一例。图5(c)表示在车辆1的行进方向上存在右弯道的情况下的容许范围的一例。此外,在图5中,附图标记D表示驾驶员,附图标记Dv所示的箭头表示视野方向的一例。
如图5所示,与在车辆1的行进方向上不存在弯道的情况下的容许范围相比,在车辆1的行进方向上存在弯道的情况下的容许范围在车辆1的左右方向中的存在弯道的一侧(在左弯道的情况下为左侧,在右弯道的情况下为右侧)宽。由此,在车辆1的行进方向上存在弯道的情况下,能够在车辆1的左右方向中的存在弯道的一侧扩大容许范围,能够设定与车辆1的行进方向上的行驶道路的状态相应的适当的容许范围。
[容许范围的其他例子]
在车辆1的行进方向上存在弯道的情况下的容许范围也可以根据该弯道的曲率半径而变动。图6(a)表示在车辆1的行进方向上存在曲率半径为规定值(以下也称为“第一规定值”)的左弯道的情况下的容许范围的一例。另外,图6(b)表示在车辆1的行进方向上存在曲率半径比第一规定值小的第二规定值的左弯道的情况下的容许范围的一例。
如图6所示,在该弯道的曲率半径小的情况下(即急转弯的情况下),与该弯道的曲率半径大的情况(即平缓的弯道的情况)相比,在车辆1的行进方向上存在弯道的情况下的容许范围在左右方向中的存在该弯道的一侧宽,在其相反的另一侧窄。由此,在车辆1的行进方向上存在弯道的情况下,能够设定考虑了该弯道的曲率半径的容许范围,能够设定与车辆1的行进方向上的行驶道路的状态相应的适当的容许范围。
另外,控制装置30也可以在车辆1在弯道行驶时,配合车辆1的行进而使容许范围向该弯道的方向(弯道的内侧)逐渐变宽等,配合车辆1的行进而使容许范围动态地变化。
[控制装置的具体的控制例]
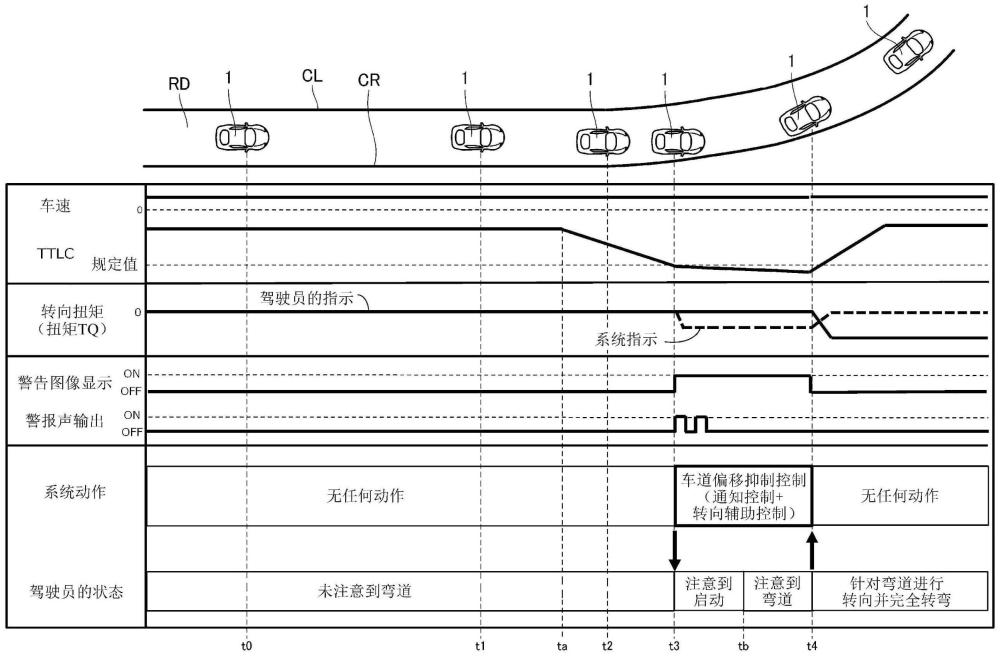
接着,参照图7对控制装置30的具体的控制例进行说明。在图7中,车辆1在由左侧划分线CL和右侧划分线CR分别划分出左右侧的行驶道路RD上行驶。另外,行驶道路RD具有直线区间和左弯道。在此,对车辆1在行驶道路RD的直线区间行驶后进入左弯道的情况的例子进行说明。
在图7所示的时刻t0到时刻t2的期间,车辆1以恒定的车速V和扭矩TQ(图示为“转向扭矩”)在行驶道路RD的直线区间行驶。另外,此时,虽然驾驶员未注意到位于直线区间的前方的左弯道,但由于车辆1相对于左侧划分线CL和右侧划分线CR的TTLC均为规定值以上,因此控制装置30不执行车道偏移抑制控制(图示为系统动作“无任何动作”)。即,此时,基于车道偏移抑制控制的警告图像的显示和警报声的输出均为关闭。但是,从时刻ta(t1<ta<t2)起,车辆1开始接近行驶道路RD的划分线(此处为右侧划分线CR),与之相应,TTLC(更具体而言,相对于右侧划分线CR的TTLC)也开始减少。
在时刻t2后的时刻t3,虽然车辆1进入了行驶道路RD的左弯道,但驾驶员正在进行旁视驾驶,未注意到车辆1进入了弯道。因此,驾驶员不对转向装置46进行想要在弯道转弯的操作,扭矩TQ保持为“0”。在这样的情况下,控制装置30基于来自乘员摄像头17、扭矩传感器42等驾驶状况传感器的驾驶状况信息,判断为驾驶员的驾驶状况不适合在行驶道路上行驶。另外,由于驾驶员未进行适当的用于在弯道转弯的操作,因此TTLC进一步减少,在时刻t3达到作为执行车道偏移抑制控制的条件的规定值。
在这样的情况下,控制装置30从时刻t3起执行车道偏移抑制控制。具体而言,作为转向辅助控制,控制装置30对EPS系统40的EPS ECU45指示向转向柱47赋予规定的驱动力。接收到该指示,EPS ECU45驱动EPS马达43,对转向柱47赋予驱动力。由此,对扭矩TQ(转向扭矩)施加基于系统指示的扭矩。
进而,作为通知控制,控制装置30使触控面板21显示警告图像,并且从扬声器22输出警报声。即,警告图像的显示和警报声的输出开启。由此,能够向驾驶员通知车道偏移抑制控制已启动。此外,如上所述,代替触控面板21,警告图像也可以显示于多信息显示器等其他显示装置。
注意到车道偏移抑制控制的启动的驾驶员在紧随其后的时刻tb(t3<tb<t4)注意到车辆1进入了左弯道。并且,注意到车辆1进入了左弯道的驾驶员在其之后的时刻t4开始利用转向装置46进行转向,伴随于此,车辆1逐渐恢复到行驶道路RD的大致中央位置。由此,驾驶员的驾驶状况符合行驶道路RD的行驶,另外,TTLC也为规定值以上,因此伴随着车辆1在弯道完全转弯,控制装置30结束车道偏移抑制控制。
如以上说明的那样,控制装置30(例如控制部33)在车辆1的行进方向上存在弯道、车辆1从行驶道路偏移的可能性高、且驾驶员的驾驶状况不适合在行驶道路上行驶的情况下,执行对驾驶员的通知。由此,能够在进行对驾驶员重要的通知的同时,抑制可能使驾驶员感到厌烦的过度通知,能够实现车辆1的安全性的提高。
另外,控制装置30(例如控制部33)在车辆1的行进方向上存在弯道、车辆1从行驶道路偏移的可能性高、且驾驶员的驾驶状况不适合在行驶道路上行驶的情况下,还执行抑制车辆1从行驶道路偏移的转向辅助控制。由此,能够进一步提高车辆1的安全性。
此外,在图7中说明的例子中,同时开始基于车道偏移抑制控制的通知控制和转向辅助控制,但本发明不限于此。例如,控制装置30也可以在车辆1的行进方向存在弯道、车辆1从行驶道路偏移的可能性高、且驾驶员的驾驶状况不适合在行驶道路上行驶的情况下,首先执行对驾驶员的通知(即通知控制),若在该通知后车辆1从行驶道路偏移的可能性进一步变高(例如TTLC进一步变小),则执行转向辅助控制。这样,首先执行对驾驶员的通知来促使驾驶员进行自主的操作,由此能够避免驾驶员过于依赖于转向辅助控制。另一方面,在车辆1从行驶道路偏移的可能性进一步变高的情况下执行转向辅助控制,由此抑制车辆1从行驶道路偏移而实现车辆1的安全性的提高。
[驾驶状况判定表的其他例子]
接下来,参照图8对驾驶状况判定表TL的其他例子进行说明。例如,即使驾驶员的视野方向在容许范围外,在扭矩TQ和转向角θst为阈值以上的情况下,驾驶员也有可能为了驾驶车辆1而对转向装置46进行了适当的操作。因此,如图8所示,在作为驾驶员的驾驶状况而获取到包含扭矩TQ以及转向角θst为阈值以上(图示为“有”)的信息的驾驶状况信息的情况下,即使驾驶员的视野方向在容许范围外,控制装置30也可以判断为驾驶员的驾驶状况适合在行驶道路上行驶,将驾驶状况非匹配标志设定为关闭(参照图8中的附图标记TL_c、TL_e)。需要说明的是,包括“无”与转向装置46的接触且扭矩TQ及转向角θst为阈值以上的信息的驾驶状况信息例如可能在驾驶员戴着手套驾驶车辆1的情况下获得。
另外,若驾驶员的视野方向在容许范围内,即使不执行车道偏移抑制控制(通知控制),驾驶员注意到车辆1要向车道外偏移的可能性也较高。因此,如图8所示,在作为驾驶员的驾驶状况而获取到包括驾驶员的视野方向处于容许范围内的信息的驾驶状况信息的情况下,即使“无”对转向装置46的接触、或者扭矩TQ以及转向角θst小于阈值,控制装置30也可以判断为驾驶员的驾驶状况适合在行驶道路上行驶,并将驾驶状况非匹配标志设定为关闭(参照图8中的附图标记TL_h)。
根据图8所示的驾驶状况判定表TL,与图4所示的驾驶状况判定表TL相比,能够进一步抑制过度的车道偏移抑制控制。
[控制装置30执行的其他处理]
在车道偏移抑制控制的执行频率高的情况下,驾驶员完全依赖于车道偏移抑制控制,正确驾驶车辆1的意识可能降低。为了对这样的驾驶员进行注意唤起,控制装置30例如也可以在车辆1的点火电源接通时,以规定周期执行图9所示的处理。
如图9所示,控制装置30首先判定车道偏移抑制控制的执行频率是否比规定的阈值高(步骤S41)。执行频率例如是每单位时间的车道偏移抑制控制的执行次数。例如,控制装置30将执行车道偏移抑制控制的时刻与表示车道偏移抑制控制执行的信息建立了对应关系的车道偏移抑制控制的执行历史信息存储于控制装置30的存储装置等。由此,控制装置30通过参照存储在控制装置30的存储装置等中的车道偏移抑制控制的执行历史信息,能够求出车道偏移抑制控制的执行频率。
在车道偏移抑制控制的执行频率低的情况下(步骤S41:否),控制装置30直接结束图9所示的一系列的处理。另一方面,在车道偏移抑制控制的执行频率高的情况下(步骤S41:是),控制装置30与步骤S11的处理同样地,判定在车辆1的行进方向上是否存在弯道(步骤S42)。在车辆1的行进方向上存在弯道的情况下(步骤S42:是),控制装置30直接结束图9所示的一系列的处理。
另一方面,在车辆1的行进方向上不存在弯道的情况下(步骤S42:否),控制装置30执行对驾驶员的规定的注意唤起(步骤S43),结束图9所示的一系列的处理。通过步骤S43的处理而执行的注意唤起是与通过车道偏移抑制控制的通知控制而执行的通知不同的通知,例如,通过使触控面板21等显示装置显示或从扬声器22输出“观察到驾驶意识的降低,请注意适当驾驶”这样的消息来进行。
如以上说明的那样,控制装置30在车道偏移抑制控制的执行频率高的情况下,在车辆1的行进方向上没有弯道时对驾驶员执行规定的注意唤起。由此,在存在驾驶员想要适当地驾驶的意识降低的可能性的情况下,能够促使驾驶员在转向操作较不忙碌的适当的时机进行适当的驾驶。
此外,在图9所示的例子中,基于执行频率执行对驾驶员的注意唤起,但本发明不限于此。例如,代替执行频率,也可以在2个弯道上连续地执行了车道偏移抑制控制的情况下(即连续启动次数超过阈值的情况下),控制装置30执行注意唤起。
以上,参照附图对本发明的一个实施方式进行了说明,但本发明当然不限定于上述的实施方式。只要是本领域技术人员,就能够在权利请求的范围所记载的范畴内想到各种变更例或修正例,这些当然也属于本发明的技术范围。另外,在不脱离发明的主旨的范围内,也可以将前述实施方式中的各构成要素任意地组合。
例如,在上述的实施方式中,使用TTLC作为表示车辆1从行驶道路偏移的可能性的高低的指标,但本发明不限于此。例如,代替TTLC,可以使用车辆1与划分线之间的距离作为指示车辆1从行驶道路偏移的可能性的高低的指标。另外,例如,控制装置30也可以对发生了车辆1从行驶道路偏移的场景进行机器学习,使用该学习结果来推定车辆1从行驶道路偏移的可能性的高低。
在本说明书等中至少记载了以下事项。需要说明的是,在括号内示出了在前述实施方式中对应的构成要素等,但是本发明并不限于此。
(1)一种控制装置(控制装置30),其对车辆(车辆1)进行控制,该车辆具备:外界传感器(传感器组10),其获取本车辆(车辆1)的周边信息;驾驶状况传感器(操作检测部16、乘员摄像头17、转向角传感器41、扭矩传感器42、转向装置接触传感器48),其获取表示本车辆的驾驶员的驾驶状况的驾驶状况信息;以及通知装置(触控面板21、扬声器22),其能够执行对所述驾驶员的通知,其中,
所述控制装置具备:
划分线识别部(划分线识别部31),其基于由所述外界传感器获取的所述周边信息来识别对所述车辆所行驶的行驶道路(行驶道路RD)的左右进行划分的划分线(左侧划分线CL、右侧划分线CR);
偏移预测部(偏移预测部32),其基于所述车辆相对于由所述划分线识别部识别出的所述划分线的位置和姿势,来推定所述车辆从所述行驶道路偏移的可能性的高低(TTLC);以及
控制部(控制部33),其基于由所述偏移预测部推定的从所述行驶道路偏移的可能性的高低、由所述驾驶状况传感器获取的所述驾驶状况信息、以及所述车辆的行进方向上的所述行驶道路的状态,来控制由所述通知装置执行的所述通知,
在所述行进方向上存在曲率半径小于规定值的弯道、从所述行驶道路偏移的可能性高、且所述驾驶员的驾驶状况不适合在所述行驶道路上行驶的情况下,所述控制部执行所述通知。
根据(1),能够在进行对驾驶员重要的通知的同时,抑制可能使驾驶员感到厌烦的过度通知,能够实现本车辆的安全性的提高。
(2)根据(1)所述的控制装置,其中,
所述驾驶员的驾驶状况包括所述驾驶员的面部或视线的朝向即视野方向,
在所述视野方向不包含于以所述行进方向为基准设定的容许范围内的情况下,所述控制部判断为所述驾驶员的驾驶状况不适合在所述行驶道路上行驶。
根据(2),在驾驶员正在进行观察与本车辆的行进方向完全不同的方向即进行旁视驾驶的情况下,能够执行对驾驶员的通知,通过该通知能够唤起驾驶员的注意。
(3)根据(2)所述的控制装置,其中,
所述容许范围还基于所述行进方向上的所述行驶道路的状态来设定,
与在所述行进方向上不存在弯道的情况下的所述容许范围相比,在所述行进方向上存在弯道的情况下的所述容许范围在所述车辆的左右方向中的存在所述弯道的一侧宽。
根据(3),在本车辆的行进方向上存在弯道的情况下,能够在左右方向中的存在弯道的一侧扩大容许范围,因此能够设定与本车辆的行进方向上的行驶道路的状态相应的适当的容许范围。
(4)根据(3)所述的控制装置,其中,
在所述弯道的曲率半径小的情况下,与所述弯道的曲率半径大的情况相比,在所述行进方向上存在弯道的情况下的所述容许范围在所述一侧宽。
根据(4),能够根据本车辆的行进方向上的弯道的曲率半径,在存在弯道的一侧扩大容许范围,因此能够设定与本车辆的行进方向上的行驶道路的状态相应的适当的容许范围。
(5)根据(3)或(4)所述的控制装置,其中,
在所述弯道的曲率半径小的情况下,与所述弯道的曲率半径大的情况相比,在所述行进方向上存在弯道的情况下的所述容许范围在所述左右方向中的与所述一侧相反的另一侧窄。
根据(5),能够根据本车辆的行进方向上的弯道的曲率半径,使容许范围在与弯道所在的一侧的相反的另一侧变窄,因此能够设定与本车辆的行进方向上的行驶道路的状态相应的适当的容许范围。
(6)根据(1)至(5)中任一项所述的控制装置,其中,
所述驾驶员的驾驶状况包括针对操作部的操作状态,所述操作部接受对所述车辆进行转向的操作,
在没有针对所述操作部的操作的情况下,所述控制部判断为所述驾驶员的驾驶状况不适合在所述行驶道路上行驶。
在没有针对受理对本车辆进行转向的操作的操作部的操作的情况下,驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高。根据(6),在驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高的情况下,能够执行对驾驶员的通知,能够通过该通知来唤起驾驶员的注意。
(7)根据(6)所述的控制装置,其中,
在所述驾驶员未接触所述操作部的情况下,所述控制部判断为没有针对所述操作部的操作。
在驾驶员未接触操作部的情况下,驾驶员未进行对操作部的操作,驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高。根据(7),在驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高的情况下,能够执行对驾驶员的通知,能够通过该通知来唤起驾驶员的注意。
(8)根据(6)或(7)所述的控制装置,其中,
在针对所述操作部的操作量或对所述操作部施加的力小于阈值的情况下,所述控制部判断为没有针对所述操作部的操作。
在对操作部的操作量或对操作部施加的力小于阈值的情况下,驾驶员未对操作部进行适当的操作,驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高。根据(8),在驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高的情况下,能够执行对驾驶员的通知,能够通过该通知来唤起驾驶员的注意。
(9)根据(8)所述的控制装置,其中,
在所述驾驶员接触所述操作部且所述操作量或对所述操作部施加的力小于所述阈值的情况下,所述控制部判断为没有针对所述操作部的操作。
即使驾驶员接触到操作部,在对操作部的操作量或对操作部施加的力小于阈值的情况下,驾驶员未对操作部进行适当的操作,驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高。根据(9),在驾驶员的驾驶状况不适合在行驶道路上行驶的可能性高的情况下,能够执行对驾驶员的通知,能够通过该通知来唤起驾驶员的注意。
(10)根据(1)至(9)中任一项所述的控制装置,其中,
在所述行进方向上存在所述弯道、从所述行驶道路偏移的可能性高、且所述驾驶员的驾驶状况不适合在所述行驶道路上行驶的情况下,所述控制部还执行抑制所述车辆从所述行驶道路偏移的转向辅助控制。
根据(10),能够进一步提高本车辆的安全性。
(11)根据(10)所述的控制装置,其中,
所述通知装置能够对所述驾驶员执行作为所述通知的第一通知和与所述第一通知不同的第二通知,
根据所述第一通知和所述转向辅助控制中的至少一方的执行历史,所述控制部在所述行进方向上不存在所述弯道时执行所述第二通知。
根据(11),在存在驾驶员想要适当地驾驶的意识降低的可能性的情况下,能够促使驾驶员在转向操作较不忙碌的适当的时机进行适当的驾驶。