一种鼓式制动器制动噪声预测方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及制动噪声领域,尤其涉及一种鼓式制动器制动噪声预测方法。使用复模态分析可以一次获取鼓式制动器所有不稳定模态,其中就有可能包含噪声频率;而瞬态动力学分析可以获取制动器制动时各部件的时域响应,包括位移、速度、加速度,通过离散傅里叶变换可以获得制动器的频域响应。
背景技术
制动噪声是困扰汽车行业许多年的问题,许多研究者通过实验,仿真等方法对制动噪声进行了研究,试图了解预防和预测制动噪声的发生,但限于制动噪声产生机理的复杂性,至今未能提出一套完整的方案解决制动噪声。随着有限元技术的发展,数值仿真已成为分析制动噪声的首选方法。与实验方法相比,有限元方法能够模拟制动部件的任何改动,灵活性高,成本低。
利用有限元方法预测制动噪声通常有两种分析方法,复模态分析与瞬态分析,两种方法各有优缺点。在复模态分析中,复特征值的实部表明制动系统不稳定程度,虚部为对应模态的固有频率,复模态分析可以在一次模拟分析中找到所有的不稳定频率,但并不是所有的不稳定频率都能在实际工况下发现,如果实际工况下制动蹄与制动鼓之间的粘滑振动频率与制动系统不稳定频率不相等,则系统不会失稳产生噪声,该阶模态频率就不会出现;对于瞬态动力学分析,原则上能够预测在实际工况下出现的不稳定频率,即噪声频率,但是较复模态分析而言,瞬态动力学分析计算量较大,而且它不能指出系统不稳定模态的具体信息。复模态方法已经用于预测盘式制动器的异响研究中,但针对鼓式制动器异响的研究相对较少。由于复模态分析仅考虑鼓式制动器的结构因素,预测的噪声频率可能与实际情况有所偏差。
发明内容
为了解决现有技术中存在的问题,本发明提供一种鼓式制动器制动噪声预测方法,该方法主要是通过有限元计算制动系统的时频特性,以确保计算结果的准确性。
为了实现本发明目的,本发明提供的一种鼓式制动器制动噪声预测方法,按以下步骤实现:
(1)建立鼓式制动器三维模型:在三维建模软件中建立鼓式制动器三维模型。
(2)网格划分:为了保证有限元模型的计算精度,对鼓式制动器各部件比如制动鼓、制动蹄、摩擦衬片、凸轮轴均进行六面体网格划分,网格单元尺寸控制在2mm以内。对于受力较复杂的摩擦衬片,采用更精细的六面体网格,网格单元尺寸为1mm;
(3)材料属性赋予:给鼓式制动器各部件的网格赋予材料属性,材料属性包括密度
ρ,弹性模量E,泊松比ε三个参数。除摩擦衬片采用各向异性材料外,其余部件均设置为各向同性材料;
(4)装配:将鼓式制动器各部件的有限元模型装配成一个整体,形成制动器总成的有限元模型;
(5)分析步设置:
a.对于复模态分析,建立以下五个分析步:
·Step-1:静力学通用分析步,该分析步用于在凸轮轴上施加小位移载荷,使制动蹄与制动鼓平稳接触。场变量输出与历史变量输出采用默认设置。
·Step-2:静力学通用分析步,打开几何大变形开关(考虑几何非线性,
后续分析步会自动打开几何大变形开关),该分析步用于在凸轮轴上施加正常制动力,模拟实际制动过程。场变量输出与历史变量输出采用默认设置。
·Step-3:静力学通用分析步,该分析步用于在制动鼓上施加旋转角速度,模拟车轮转动。场变量输出与历史变量输出采用默认设置。
·Step-4:线性摄动分析步,该分析步用于提取制动器的实模态信息。场变量输出与历史变量输出采用默认设置。
·Step-5:线性摄动分析步,该分析步用于提取制动器的复模态信息,使用子空间迭代法求解器。需考虑由摩擦引起的阻尼效应。场变量输出与历史变量输出采用默认设置。
b.对于瞬态动力学分析,建立以下三个分析步:
·Step-1:动力学隐式分析步,仿真时间设置为1s。该分析步用于在凸轮轴上施加小位移载荷,使制动蹄与制动鼓平稳接触。场变量输出与历史变量输出采用默认设置。
·Step-2:动力学隐式分析步,仿真时间设置为1s。该分析步用于在凸轮轴上施加正常制动力,模拟实际制动过程。场变量输出与历史变量输出采用默认设置。
·Step-3:动力学隐式分析步,仿真时间设置为5s。该分析步用于在制动鼓上施加旋转角速度,模拟鼓式制动器制动过程;场变量输出采用默认设置,历史变量输出为制动鼓和制动蹄上3-5个节点在制动过程中的加速度。为了使得到的加速度曲线更为平滑,可以初始增量步设为0.001,最大增量步数设置为10000,将时间输出间隔设置为0.005s;(6)相互作用:定义鼓式制动器各部件之间的运动约束及接触关系,具体信息如以
下几点:
a.制动鼓与制动蹄之间的法向接触采用“硬”接触,切向作用采用库伦摩擦模型;
b.摩擦衬片与制动蹄面板之间的连接关系为铆接,在有限元模型中直接将两者共节点;
c.凸轮轴与制动蹄之间的接触采用无摩擦硬接触,减少计算量;
d.凸轮轴设置为刚体;
(7)边界条件:制动鼓与制动蹄仅有绕各自旋转中心的转动自由度,在凸轮轴上施加一定的制动力矩。
(8)求解:前处理完成后导出求解文件,使用有限元求解软件求解。
(9)后处理:
a.对于复特征值提取,通过分析结果可以获取制动系统不稳定模态,打开后缀名为.odb的结果文件,点击Result->Step/Frame->Complex Frequecy,即可获得鼓式制动器所有不稳定模态,包括不稳定模态频率与对应的振型。
b.对于瞬态动力学分析,选择ODB history output(历史变量输出),在制动器各部件上选取几个测点,绘制其加速度响应曲线,即可得到制动器在制动过程中的时域响应。再通过FFT(快速傅里叶变换)可得到制动过程的频域响应
(10)结果分析:通过复模态分析得到结构的不稳定模态频率,通过瞬态动力学分析得到的频域响应,如果两种方法计算的频率相等或者接近,即外界激励频率与系统固有频率相等或接近,容易产生共振现象,从而引发噪声。
进一步地,制动蹄面板与摩擦衬片之间的约束不采用绑定,直接将制动蹄面板与摩擦衬片共节点。
与现有技术相比,本发明至少能够实现以下有益效果:
(1)本发明结合复模态分析与瞬态动力学分析,利用复模态分析给出制动系统的不稳定模态频率,利用瞬态动力学分析仿真模拟出实际工况下制动蹄与制动鼓之间的粘滑振动频率,如果两者相等或相近,则有可能引发制动异响,从而达到预测噪声的目的。
(2)本发明通过鼓式制动器的复模态分析,可以计算出鼓式制动器的结构特性,计算其不稳定模态对应的模态频率。
(3)本发明通过鼓式制动器的瞬态动力学分析,可以计算鼓式制动器在实际工况下的时域响应,通过傅里叶变换计算其频域响应。
附图说明
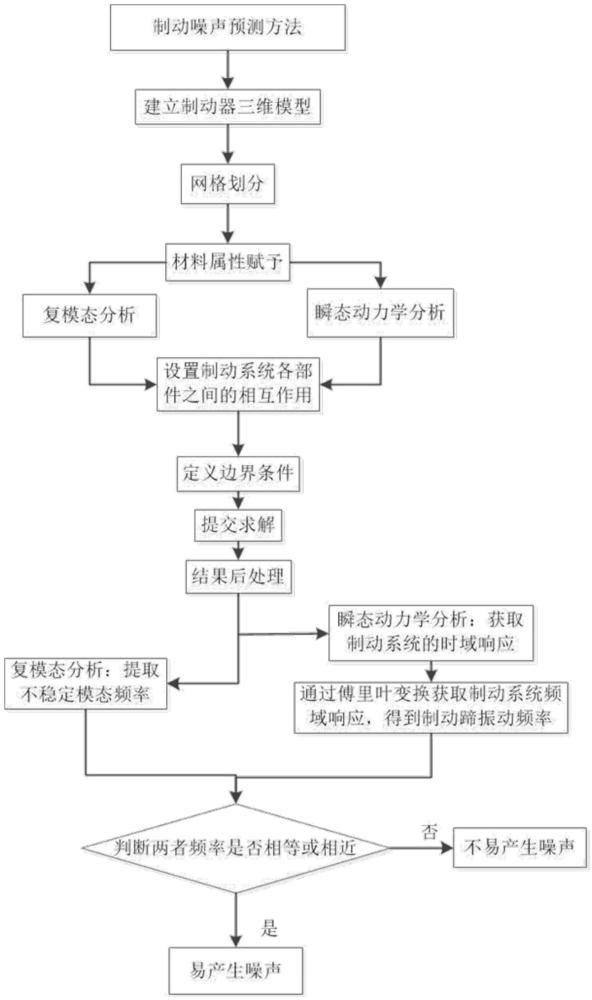
图1是本发明实施例提供的一种鼓式制动器制动噪声预测方法的步骤流程图。
图2是本发明实施例中的鼓式制动器有限元模型示意图。
图3是本发明实施例中第一阶不稳定模态示意图,模态频率为71Hz。
图4是本发明实施例中瞬态分析中制动蹄质心振动加速度时域曲线示意图。
图5是本发明实施例中制动蹄质心振动加速度频域曲线的示意图,基频为68Hz。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都是本发明保护的范围。
本发明提供的一种鼓式制动器制动噪声预测方法,通过有限元方法计算鼓式制动器的时频特性,从而预测鼓式制动器在工作过程中可能出现的噪声,实施步骤如下:
步骤1:在三维建模软件中建立鼓式制动器的三维模型。
步骤2:将鼓式制动器的三维模型进行网格划分。
在本发明的其中一些实施例中,将鼓式制动器的三维模型导入有限元前处理软件Hypermesh中进行网格划分。
在本发明的其中一些实施例中,为了保证有限元模型的计算精度,对鼓式制动器各部件比如制动鼓、制动蹄、摩擦衬片、凸轮轴均进行六面体网格划分,网格单元尺寸控制在2mm以内。对于受力较复杂的摩擦衬片,采用更精细的六面体网格,网格单元尺寸为1mm。
步骤3:材料属性赋予:给鼓式制动器各部件的网格赋予材料属性,材料属性包括密度ρ,弹性模量E,泊松比ε三个参数。除摩擦衬片采用各向异性材料外,其余部件均设置为各向同性材料。
摩擦衬片由复合材料制成,各个方向上的力学性能差异较大,故摩擦衬片的材料应该选用各向异性材料,输入摩擦衬片材料参数,以提高仿真精度。
在本发明的其中一些实施例中,制动鼓的密度7.28*10
步骤4:装配:将鼓式制动器各部件的有限元模型装配成一个整体,形成制动器总成的有限元模型。
步骤5:设置分析步。
a.对于复模态分析,建立以下五个分析步:
Step-1:静力学通用分析步,该分析步用于在凸轮轴上施加小位移载荷,使制动蹄与制动鼓平稳接触,场变量输出与历史变量输出采用默认设置;
Step-2:静力学通用分析步,打开几何大变形开关(考虑几何非线性,后续分析步会自动打开几何大变形开关),该分析步用于在凸轮轴上施加正常制动力,模拟实际制动过程,场变量输出与历史变量输出采用默认设置;
Step-3:静力学通用分析步,该分析步用于在制动鼓上施加旋转角速度,模拟车轮转动,场变量输出与历史变量输出采用默认设置;
Step-4:线性摄动分析步,该分析步用于提取制动器的实模态信息,场变量输出与历史变量输出采用默认设置;
Step-5:线性摄动分析步,该分析步用于提取制动器的复模态信息,使用子空间迭代法求解,需考虑由摩擦引起的阻尼效应,场变量输出与历史变量输出采用默认设置;
b.对于瞬态动力学分析:建立三个分析步:
·Step-1:动力学隐式分析步,仿真时间设置为1s。该分析步用于在凸轮轴上施加小位移载荷,使制动蹄与制动鼓平稳接触。场变量输出与历史变量输出采用默认设置。
·Step-2:动力学隐式分析步,仿真时间设置为1s。该分析步用于在凸轮轴上施加正常制动力,模拟实际制动过程。场变量输出与历史变量输出采用默认设置。
·Step-3:动力学隐式分析步,仿真时间设置为5s。该分析步用于在制动鼓上施加旋转角速度,模拟鼓式制动器制动过程;场变量输出采用默认设置,历史变量输出为制动鼓和制动蹄上3-5个节点在制动过程中的加速度。为了使得到的加速度曲线更为平滑,可以将初始增量步设置得尽量小一点,如初始增量步设为0.001;隐式动力学分析步一般需要更多的增量步,如可将最大增量步数设置为10000,可以使模型计算更容易收敛;输出时间间隔设置小一点,如将时间输出间隔设置为0.005s,可以得到更多的结果输出,使加速度曲线更加平滑。其中,如果输出所有节点的加速度曲线,会导致计算速度降低与结果文件过大,因此,在本实施例中,为了提高计算速度,仅在制动鼓与制动蹄上选取3-5个节点作为输出集合。
由于鼓式制动器各部件之间的接触复杂,在第一个分析步施加一个小位移载荷,可以使模型能够平稳建立接触,避免出现刚体位移导致结果不收敛。
分析步中考虑几何大变形,可以防止制动过程中出现几何大变形,从而导致结果不收敛。
步骤6:相互作用:定义鼓式制动器各部件之间的运动约束及接触关系,具体信息如以下几点:
a.制动鼓与制动蹄之间的法向接触采用“硬”接触,切向作用采用库伦摩擦模型;
b.摩擦衬片与制动蹄面板之间的连接关系为铆接,在有限元模型中直接将两者共节点;
c.凸轮轴与制动蹄之间的接触采用无摩擦硬接触,减少计算量;
d.凸轮轴设置为刚体。
其中,制动器有限元仿真计算主要考虑制动蹄与制动鼓之间的接触,可以把凸轮轴设置为刚体,凸轮轴与制动蹄之间的接触不考虑摩擦,以简化模型复杂度。
步骤7:确定边界条件:制动鼓与制动蹄仅有绕各自旋转中心的转动自由度,在凸轮轴上施加一定的制动力矩。
步骤8:求解:前处理完成后导出求解文件,使用有限元求解软件求解,得到有限元求解结果。
在本发明的其中一些实施例中,采用的限元求解软件为Abaqus。
步骤9:后处理,进行复模态分析和瞬态动力学分析,获取制动系统的所有不稳定模态和制动器在制动过程中的时域响应,基于所述时域响应得到制动过程的频域响应。
具体地,在本发明的其中一些实施例中,对于复特征值提取,通过分析结果可以获取制动系统不稳定模态,打开后缀名为.odb的结果文件,点击Result->Step/Frame->Complex Frequecy,即可获得鼓式制动器所有不稳定模态,包括不稳定模态频率与对应的振型;对于瞬态动力学分析,选择ODB history output(历史变量输出),在制动器各部件上选取几个测点,绘制其加速度响应曲线,即可得到制动蹄与制动鼓在制动过程中的时域响应。再通过FFT(快速傅里叶变换)可得到制动过程的频域响应。
如果复模态分析提取的结构不稳定模态频率与瞬态动力学分析获取的制动蹄振动频率相等或接近,则制动系统易共振,从而产生制动噪声,结构会以该阶不稳定模态频率振动。
其中,复特征值提取过程中,鼓式制动器中存在复杂的结构耦合与摩擦耦合,系统刚度矩阵为非对称矩阵,系统动力学方程不能解耦,必须采用复特征值提取法获取制动器模态参数,求解原理如下:
制动系统动力学方程为
式中,M为质量矩阵,
由于系统整体刚度矩阵(K-K
设式(1)的解为
其中
求解式(3)可得第k阶特征值为
λ
σ
系统第k阶运动由第k阶复特征值和复特征向量表示,即
由式(5)可知,当实部σ
在本发明的其中一些实施例中,得到的鼓式制动器某阶不稳定模态如图3所示,可知制动系统第一阶不稳定模态频率为70Hz,制动蹄质心振动加速度时域曲线如图4所示,制动蹄振动加速度频域曲线如图5所示,从图5中可以看出,制动蹄在给定工况下的振动频率为68Hz,该频率与制动系统第一阶不稳定模态频率接近,易引起结构共振,从而产生噪声。
本发明前述实施例提供的方法,本结合复模态分析与鼓式制动器瞬态动力学分析,不仅仅考虑鼓式制动器的结构特性,还通过瞬态动力学分析计算其实际工况下制动蹄与制动鼓之间的粘滑振动频率,如果粘滑振动频率与模态频率相等或者接近,则会产生异响,以此预测噪声。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其他实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。