波纹管泵装置
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及一种波纹管泵装置。
背景技术
在半导体制造、化学工业等中,作为为了输送供给药液、溶剂等移送流体而使用的波纹管泵,已知以如下方式构成的结构,即,在泵头的两侧将泵壳体连结而形成2个空气室,在上述空气室的内部设置相互独立而能够伸缩的一对波纹管,向各空气室交替地供给加压空气而使得各波纹管连续地伸缩(例如,参照专利文献1)。
关于专利文献1记载的波纹管泵,一对波纹管中的一个波纹管收缩而将移送流体向其内部吸入,与此同时,另一个波纹管伸长而将其内部的移送流体排出。另外,所述另一个波纹管收缩而将移送流体向其内部吸入,与此同时,所述一个波纹管伸长而将其内部的移送流体排出。
专利文献1:日本特开2012-211512号公报
发明内容
关于上述波纹管泵,在一个波纹管从伸长向收缩(从移送流体的吸入向排出)切换的定时,另一个波纹管从收缩向伸长(从移送流体的排出向吸入)切换。此时,对向一个波纹管的移送流体的吸入进行开闭的吸入阀、以及对向另一个波纹管的移送流体的吸入进行开闭的吸入阀这两个阀有时在瞬间同时关闭。在该情况下,吸入移送流体的流动被切断,因此在将移送流体吸入至波纹管泵的吸入配管内产生称为“水锤”的冲击压力、气穴,有可能对半导体制造工艺等造成不良影响。
本发明就是鉴于这种情形而提出的,其目的在于提供在从移送流体的吸入向排出切换时能够抑制产生冲击压力、气穴的波纹管泵装置。
(1)本发明是一种波纹管泵装置,其具有:第1波纹管和第2波纹管,它们彼此独立地伸缩自由,通过伸长而将移送流体吸入至内部,通过收缩而将移送流体从内部排出;第1驱动部,其使所述第1波纹管在规定的伸长状态与规定的收缩状态之间连续地进行伸缩动作;第2驱动部,其使所述第2波纹管在规定的伸长状态与规定的收缩状态之间连续地进行伸缩动作;第1检测部,其检测所述第1波纹管的伸缩状态;第2检测部,其检测所述第2波纹管的伸缩状态;以及控制部,其基于所述第1检测部及所述第2检测部的各检测信号以如下方式进行所述第1驱动部及所述第2驱动部的驱动控制,即,在所述第1波纹管即将达到所述伸长状态之前使所述第2波纹管从所述收缩状态伸长,并且在所述第2波纹管即将达到所述伸长状态之前使所述第1波纹管从所述收缩状态伸长。
根据本发明的波纹管泵装置,控制部以如下方式进行驱动控制,即,在第1波纹管即将达到伸长状态之前使第2波纹管从收缩状态伸长(吸入),并且在第2波纹管即将达到伸长状态之前使第1波纹管从收缩状态伸长(吸入)。由此,在第1波纹管(第2波纹管)的从吸入向排出的切换定时,第2波纹管(第1波纹管)已经伸长而吸入移送流体,因此不会在所述切换定时使得将移送流体向波纹管泵装置吸入的流动切断。其结果,在移送流体从吸入向排出切换时能够抑制产生冲击压力、气穴。
(2)优选地,所述第1驱动部具有被供给用于使所述第1波纹管伸长至所述伸长状态的加压流体的第1吸入侧流体室,所述第2驱动部具有被供给用于使所述第2波纹管伸长至所述伸长状态的加压流体的第2吸入侧流体室,所述波纹管泵装置还具有:第1流体压力调整部,其对供给至所述第1驱动部的第1吸入侧流体室的加压流体的第1流体压力进行调整;以及第2流体压力调整部,其对供给至所述第2驱动部的第2吸入侧流体室的加压流体的第2流体压力进行调整。
在该情况下,利用第1流体压力调整部(第2流体压力调整部)对供给至第1驱动部(第2驱动部)的第1吸入侧流体室(第2吸入侧流体室)的加压流体的第1流体压力(第2流体压力)进行调整,从而能够调整第1波纹管(第2波纹管)的伸长速度。
(3)优选地,所述控制部基于所述各检测信号,在所述第1波纹管伸长至即将达到所述伸长状态之前的伸长中途状态时判定所述第2波纹管是否使得所述收缩状态持续了大于或等于规定时间的时间,在该判定结果为肯定的情况下,进行以使得下一次的所述第1波纹管伸长时的所述第1流体压力升高的方式对所述第1流体压力调整部进行控制的第1升压控制,并且基于所述各检测信号,在所述第2波纹管伸长至即将达到所述伸长状态之前的伸长中途状态时判定所述第1波纹管是否使得所述收缩状态持续了大于或等于规定时间的时间,在该判定结果为肯定的情况下,进行以使得下一次的所述第2波纹管伸长时的所述第2流体压力升高的方式对所述第2流体压力调整部进行控制的第2升压控制。
在上述驱动控制中,在第1波纹管(第2波纹管)伸长至伸长中途状态时,有时第2波纹管(第1波纹管)使得收缩状态持续了大于或等于规定时间的时间。其原因在于,因气氛温度等变化而导致第1波纹管(第2波纹管)变硬、因移送流体的流量变化等而导致第1波纹管(第2波纹管)的伸长时间大于或等于所需程度地延长。如果第1波纹管(第2波纹管)的伸长时间变得过长,则波纹管泵装置的排出侧的脉动变差。
对此,上述(3)的控制部进行如下第1升压控制(第2升压控制),即,在第1波纹管(第2波纹管)伸长至伸长中途状态时,在第2波纹管(第1波纹管)使得收缩状态持续了大于或等于规定时间的时间的情况下,在下一次的第1波纹管(第2波纹管)伸长时,使得供给至第1吸入侧流体室(第2吸入侧流体室)的加压流体的第1流体压力(第2流体压力)升高。由此,在第1波纹管(第2波纹管)的伸长时间大于或等于所需程度地延长时,能够自动地将用于使第1波纹管(第2波纹管)伸长的第1流体压力(第2流体压力)重新设定为较高的值。其结果,下一次的第1波纹管(第2波纹管)的伸长时间缩短,因此能够抑制波纹管泵装置的排出侧的脉动变差。
(4)优选地,所述(2)的控制部基于所述各检测信号,在所述第1波纹管伸长至即将达到所述伸长状态之前的伸长中途状态时判定所述第2波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,进行以使得下一次的所述第1波纹管伸长时的所述第1流体压力降低的方式对所述第1流体压力调整部进行控制的第1降压控制,并且基于所述各检测信号,在所述第2波纹管伸长至即将达到所述伸长状态之前的伸长中途状态时判定所述第1波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,进行以使得下一次的所述第2波纹管伸长时的所述第2流体压力降低的方式对所述第2流体压力调整部进行控制的第2降压控制。
在上述驱动控制中,在第1波纹管(第2波纹管)伸长至伸长中途状态时,有时第2波纹管(第1波纹管)未收缩至收缩状态。其原因在于,因气氛温度等变化而导致第1波纹管(第2波纹管)变软、因移送流体的流量变化等而导致第1波纹管(第2波纹管)的伸长时间缩短。如果第1波纹管(第2波纹管)的伸长时间缩短,则其伸长速度加快,在第1波纹管(第2波纹管)的内部产生负压,从而有可能在波纹管泵装置的吸入侧产生冲击压力、气穴。
对此,上述(4)的控制部进行如下第1降压控制(第2降压控制),即,在第1波纹管(第2波纹管)伸长至伸长中途状态时,在第2波纹管(第1波纹管)未收缩至收缩状态的情况下,在下一次的第1波纹管(第2波纹管)伸长时,使供给至第1吸入侧流体室(第2吸入侧流体室)的加压流体的第1流体压力(第2流体压力)降低。由此,在第1波纹管(第2波纹管)的伸长时间缩短时,能够自动地将用于使第1波纹管(第2波纹管)伸长的第1流体压力(第2流体压力)重新设定为较低的值。其结果,下一次的第1波纹管(第2波纹管)的伸长时间延长且伸长速度减慢,因此能够进一步抑制在波纹管泵装置的吸入侧产生冲击压力、气穴。
(5)优选地,所述(3)的控制部基于所述各检测信号,在所述第1波纹管伸长至即将达到所述伸长状态之前的伸长中途状态时判定所述第2波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,进行以使得下一次的所述第1波纹管伸长时的所述第1流体压力降低的方式对所述第1流体压力调整部进行控制的第1降压控制,并且基于所述各检测信号,在所述第2波纹管伸长至即将达到所述伸长状态之前的伸长中途状态时判定所述第1波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,进行以使得下一次的所述第2波纹管伸长时的所述第2流体压力降低的方式对所述第2流体压力调整部进行控制的第2降压控制。
在该情况下,进行第1升压控制(第2升压控制)及第1降压控制(第2降压控制)这两种控制。由此,在第1波纹管(第2波纹管)的伸长时间大于或等于所需程度地延长时,能够自动地将用于使第1波纹管(第2波纹管)伸长的第1流体压力(第2流体压力)重新设定为较高的值,并且在第1波纹管(第2波纹管)的伸长时间缩短时能够自动地将用于使第1波纹管(第2波纹管)伸长的第1流体压力(第2流体压力)重新设定为较低的值。
(6)优选地,所述控制部基于所述各检测信号在所述第1波纹管伸长至所述伸长状态时判定所述第2波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,将下一次的所述第1波纹管伸长时的基于所述第1流体压力调整部的所述第1流体压力的调整范围的上限值设定为比上一次的所述第1波纹管伸长时的所述第1流体压力更低,并且基于所述各检测信号在所述第2波纹管伸长至所述伸长状态时判定所述第1波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,将下一次的所述第2波纹管伸长时的基于所述第2流体压力调整部的所述第2流体压力的调整范围的上限值设定为比上一次的所述第2波纹管伸长时的所述第2流体压力更低。
在控制部进行第1升压控制(第2升压控制)的情况下,在第1波纹管(第2波纹管)伸长至伸长状态时,有时第2波纹管(第1波纹管)未收缩至收缩状态。其原因在于,通过第1升压控制(第2升压控制)使得供给至第1吸入侧流体室(第2吸入侧流体室)的加压流体的第1流体压力(第2流体压力)大于或等于所需程度地升高,从而第1波纹管(第2波纹管)的伸长时间变得过短。如果第1波纹管(第2波纹管)的伸长时间变得过短,则无法正常地进行所述驱动控制,有可能在波纹管泵装置的吸入侧产生冲击压力、气穴。
对此,上述(6)的控制部将下一次的第1波纹管(第2波纹管)伸长时的第1流体压力(第2流体压力)的调整范围的上限值设定为比上一次的第1波纹管(第2波纹管)伸长时的第1流体压力(第2流体压力)更低。由此,能够限制在下一次的第1波纹管(第2波纹管)伸长时利用第1流体压力调整部(第2流体压力调整部)调整的第1流体压力(第2流体压力)高于上限值,能够抑制第1波纹管(第2波纹管)的伸长时间变得过短。其结果,能够进一步抑制在波纹管泵装置的吸入侧产生冲击压力、气穴。
(7)优选地,所述控制部基于所述各检测信号,在所述第1波纹管伸长至所述伸长状态时判定所述第2波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,将下下次以后的所述第1波纹管伸长时的基于所述第1流体压力调整部的所述第1流体压力的调整范围的上限值设定为比上一次的所述第1波纹管伸长时的所述第1流体压力更低,并且基于所述各检测信号,在所述第2波纹管伸长至所述伸长状态时判定所述第1波纹管是否处于所述收缩状态,在该判定结果为否定的情况下,将下下次以后的所述第2波纹管伸长时的基于所述第2流体压力调整部的所述第2流体压力的调整范围的上限值设定为比上一次的所述第2波纹管伸长时的所述第2流体压力更低。
在控制部进行了第1升压控制(第2升压控制)的情况下,在第1波纹管(第2波纹管)伸长至伸长状态时,有时第2波纹管(第1波纹管)未收缩至收缩状态。其原因在于,通过第1升压控制(第2升压控制)使得供给至第1吸入侧流体室(第2吸入侧流体室)的加压流体的第1流体压力(第2流体压力)大于或等于所需程度地升高,从而第1波纹管(第2波纹管)的伸长时间变得过短。如果第1波纹管(第2波纹管)的伸长时间变得过短,则无法正常地进行所述驱动控制,有可能在波纹管泵装置的吸入侧产生冲击压力、气穴。
对此,上述(7)的控制部将下下次以后的第1波纹管(第2波纹管)伸长时的第1流体压力(第2流体压力)的调整范围的上限值设定为比上一次的第1波纹管(第2波纹管)伸长时的第1流体压力(第2流体压力)更低。由此,能够限制在下下次以后的第1波纹管(第2波纹管)伸长时由第1流体压力调整部(第2流体压力调整部)调整后的第1流体压力(第2流体压力)高于上限值,能够抑制第1波纹管(第2波纹管)的伸长时间变得过短。其结果,能够进一步抑制在波纹管泵装置的吸入侧产生冲击压力、气穴。
发明的效果
根据本发明的波纹管泵装置,在移送流体从吸入向排出切换时能够抑制产生冲击压力等。
附图说明
图1是本发明的实施方式所涉及的波纹管泵装置的概略结构图。
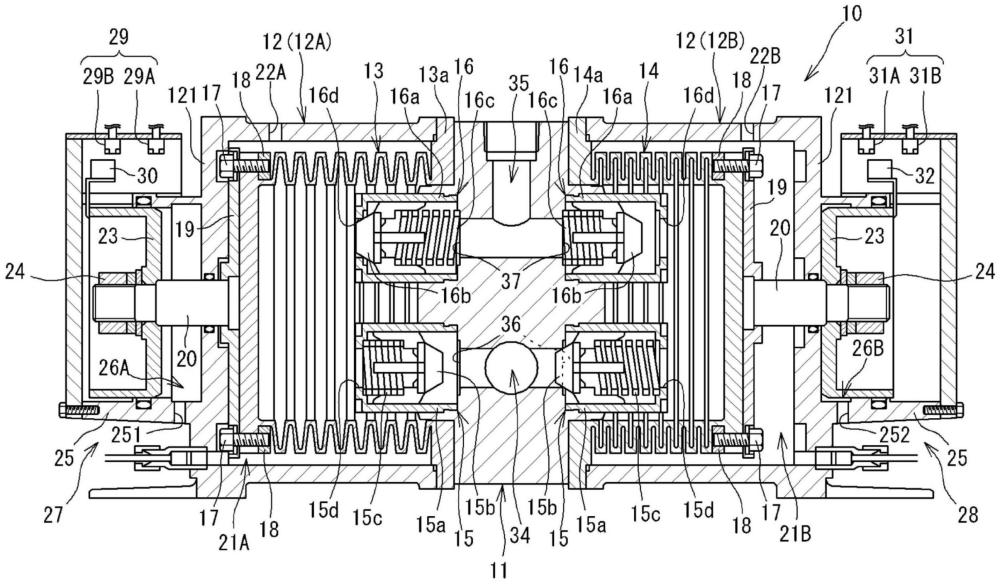
图2是波纹管泵的剖面图。
图3是表示波纹管泵的动作的说明图。
图4是表示波纹管泵的动作的说明图。
图5是表示驱动控制的一个例子的时序图。
图6是表示第1升压控制以及第2升压控制的一个例子的时序图。
图7是表示第1降压控制以及第2降压控制的一个例子的时序图。
图8是表示利用第1电动气动调节器对第1气压的调整范围的上限值进行再设定的一个例子的时序图。
具体实施方式
接下来,参照附图对本发明的优选实施方式进行说明。
[整体结构]
图1是本发明的实施方式所涉及的波纹管泵装置的概略结构图。本实施方式的波纹管泵装置1例如在半导体制造装置中供给恒定量的药液、溶剂等移送流体时使用。波纹管泵装置1具有空气供给装置(流体供给装置)2、机械式调节器3、第1电磁阀4、第2电磁阀5、控制部6、波纹管泵10、第1电动气动调节器(第1流体压力调整部)51、以及第2电动气动调节器(第2流体压力调整部)52。
空气供给装置2例如由空气压缩机构成,生成向波纹管泵10供给的加压空气(加压流体)。机械式调节器3以手动方式对空气供给装置2中生成的加压空气的气压(流体压力)进行调整。后文中对第1电动气动调节器51以及第2电动气动调节器52进行叙述。
图2是本实施方式所涉及的波纹管泵10的剖面图。本实施方式的波纹管泵10具有:泵头11,其配置于中央部;一对泵壳体12,它们安装于上述泵头11的左右方向的两侧;作为一对波纹管的第1波纹管13和第2波纹管14,它们在各泵壳体12的内部安装于泵头11的左右方向的侧面;以及共计4个的止回阀15、止回阀16,它们在第1及第2波纹管13、14各自的内部安装于泵头11的左右方向的侧面。
[波纹管]
第1波纹管13及第2波纹管14由聚四氟乙烯(PTFE)、四氟乙烯/全氟烷基乙烯基醚共聚物(PFA)等氟树脂形成为有底筒形状。在第1及第2波纹管13、14的敞开侧端部一体形成的凸缘部13a及凸缘部14a以气密状按压固定于泵头11的侧面。第1及第2波纹管13、14的各周壁形成为波纹形状,构成为彼此独立地在左右方向上自由伸缩。
利用螺栓17及螺母18将工作板19固定于第1及第2波纹管13、14的封闭侧端部的外表面。第1及第2波纹管13、14能够在工作板19的外表面与有底圆筒形状的泵壳体12的底壁部121的内表面抵接的最大伸长状态、和后述的活塞体23的内表面与底壁部121的外表面抵接的最大收缩状态之间伸缩。
[泵壳体]
泵壳体12(下面,也称为“第1泵壳体12A”)的开口周缘部以气密状按压固定于第1波纹管13的凸缘部13a。由此,在第1泵壳体12A的内部的第1波纹管13的外侧形成有保持为气密状态的第1排出侧空气室(第1排出侧流体室)21A。
在第1泵壳体12A设置有第1进气排气端口22A,第1进气排气端口22A经由第1电磁阀4、第1电动气动调节器51以及机械式调节器3而与空气供给装置2连接(参照图1)。由此,如果从空气供给装置2将加压空气供给至第1排出侧空气室21A的内部,则第1波纹管13收缩至规定的收缩状态(下面,简称为“收缩状态”)。第1波纹管13的收缩状态可以是最大收缩状态,也可以是即将达到最大收缩状态之前的状态。
泵壳体12(下面,也称为“第2泵壳体12B”)的开口周缘部以气密状按压固定于第2波纹管14的凸缘部14a。由此,在第2泵壳体12B的内部的第2波纹管14的外侧形成有保持为气密状态的第2排出侧空气室(第2排出侧流体室)21B。
在第2泵壳体12B设置有第2进气排气端口22B,第2进气排气端口22B经由第2电磁阀5、第2电动气动调节器52以及机械式调节器3而与空气供给装置2连接(参照图1)。由此,如果从空气供给装置2将加压空气供给至第2排出侧空气室21B的内部,则第2波纹管14收缩至规定的收缩状态(下面,简称为“收缩状态”)。第2波纹管14的收缩状态可以是最大收缩状态,也可以是即将达到最大收缩状态之前的状态。
棒状的连结部件20将各泵壳体12A、12B的底壁部121贯通,连结部件20相对于底壁部121支撑为能够在左右方向上滑动。利用螺母24将活塞体23固定于连结部件20的外端部。活塞体23相对于在底壁部121的外侧一体设置的圆筒状的缸体25的内周面支撑为保持气密状态且能够向左右方向上滑动。
由此,在第1泵壳体12A侧,由底壁部121、缸体25以及活塞体23包围的空间设为保持了气密状态的第1吸入侧空气室(第1吸入侧流体室)26A。另外,在第2泵壳体12B侧,由底壁部121、缸体25以及活塞体23包围的空间设为保持了气密状态的第2吸入侧空气室(第2吸入侧流体室)26B。
在第1泵壳体12A侧的缸体25形成有与第1吸入侧空气室26A连通的进气排气口251。该进气排气口251经由第1电磁阀4、第1电动气动调节器51以及机械式调节器3而与空气供给装置2连接(参照图1)。由此,如果从空气供给装置2经由进气排气口251将加压空气供给至第1吸入侧空气室26A的内部,则第1波纹管13伸长至规定的伸长状态(下面,简称为“伸长状态”)。第1波纹管13的伸长状态可以是最大伸长状态,也可以是即将达到最大伸长状态之前的状态。
在第2泵壳体12B侧的缸体25形成有与第2吸入侧空气室26B连通的进气排气口252。该进气排气口252经由第2电磁阀5、第2电动气动调节器52以及机械式调节器3而与空气供给装置2连接(参照图1)。由此,如果从空气供给装置2经由进气排气口252将加压空气供给至第2吸入侧空气室26B的内部,则第2波纹管14伸长至规定的伸长状态(下面,简称为“伸长状态”)。第2波纹管14的伸长状态可以是最大伸长状态,也可以是即将达到最大伸长状态之前的状态。
根据以上结构,由在内部形成有第1排出侧空气室21A的第1泵壳体12A、形成第1吸入侧空气室26A的活塞体23以及缸体25,构成使得第1波纹管13在伸长状态与收缩状态之间连续地进行伸缩动作的第1驱动部27。
另外,由在内部形成有第2排出侧空气室21B的第2泵壳体12B、以及形成第2吸入侧空气室26B的活塞体23及缸体25,构成使得第2波纹管14在伸长状态与收缩状态之间连续地进行伸缩动作的第2驱动部28。
[检测部]
在第1驱动部27的缸体25安装有一对的接近传感器29A、接近传感器29B。在第1驱动部27的活塞体23安装有由各接近传感器29A、29B检测的被检测板30。被检测板30与活塞体23一起进行往返移动而交替地与接近传感器29A、29B接近。
接近传感器29A配置于在第1波纹管13处于收缩状态时检测被检测板30的位置。接近传感器29B配置于在第1波纹管13处于即将达到伸长状态之前的伸长中途状态时检测被检测板30的位置。如果各接近传感器29A、29B检测到被检测板30,则将该检测信号输出至控制部6。一对接近传感器29A、29B作为对第1波纹管13的伸缩状态进行检测的第1检测部29而起作用。
在第2驱动部28的缸体25安装有一对的接近传感器31A、接近传感器31B。在第2驱动部28的活塞体23安装有由各接近传感器31A、31B检测的被检测板32。被检测板32与活塞体23一起往返移动而交替地与接近传感器31A、31B接近。
接近传感器31A配置于在第2波纹管14处于收缩状态时检测被检测板32的位置。接近传感器31B配置于在第2波纹管14处于即将达到伸长状态之前的伸长中途状态时检测被检测板32的位置。如果各接近传感器31A、31B检测到被检测板30,则将该检测信号输出至控制部6。一对接近传感器31A、31B作为对第2波纹管14的伸缩状态进行检测的第2检测部31而起作用。
这里,第1波纹管13(第2波纹管14)的“伸长中途状态”是指第1波纹管13(第2波纹管14)的伸长经过位置是比伸长开始位置(收缩状态)更接近伸长结束位置(伸长状态)的位置,更详细而言,是指第1波纹管13(第2波纹管14)伸长至从收缩状态至伸长状态的的伸长长度的50%~90%的位置。
[泵头]
泵头11由PTFE、PFA等氟树脂形成。在泵头11的内部形成有移送流体的吸入通路34及排出通路35。吸入通路34及排出通路35在泵头11的外周面处开口,与设置于该外周面的吸入端口及排出端口(均省略图示)连接。
吸入端口与移送流体的贮存容器等连接,排出端口与移送流体的移送目的地连接。另外,吸入通路34及排出通路35分别具有朝向泵头11的左右两侧面处分支并且在泵头11的左右两侧面处开口的吸入口36及排出口37。各吸入口36及各排出口37分别经由止回阀15、16而与波纹管13、14的内部连通。
[止回阀]
在各吸入口36及各排出口37设置有止回阀15、16。
安装于吸入口36的止回阀15(下面,也称为“吸入用止回阀”)具有:阀壳体15a;阀体15b,其收容于上述阀壳体15a;以及压缩螺旋弹簧15c,其对上述阀体15b朝闭阀方向施力。
阀壳体15a形成为有底圆筒形状。在阀壳体15a的底壁形成有与波纹管13、14的内部连通的贯通孔15d。阀体15b利用压缩螺旋弹簧15c的作用力将吸入口36封闭(闭阀),如果由与波纹管13、14的伸缩相伴的移送流体的流动引起的背压发挥作用,则使得吸入口36敞开(开阀)。
由此,吸入用止回阀15在供自身配置的波纹管13、14伸长时打开,允许从吸入通路34朝向波纹管13、14内部的方向(一个方向)的移送流体的吸入。另外,吸入用止回阀15在供自身配置的波纹管13、14收缩时关闭,阻止移送流体向从波纹管13、14内部朝向吸入通路34的方向(另一方向)的倒流。
安装于排出口37的止回阀16(下面,也称为“排出用止回阀”)具有:阀壳体16a;阀体16b,其收容于上述阀壳体16a;以及压缩螺旋弹簧16c,其对上述阀体16b朝闭阀方向施力。
阀壳体16a形成为有底圆筒形状。在阀壳体16a的底壁形成有与波纹管13、14的内部连通的贯通孔16d。阀体16b利用压缩螺旋弹簧16c的作用力将阀壳体16a的贯通孔16d封闭(闭阀),如果由于波纹管13、14的伸缩相伴的移送流体的流动引起的背压发挥作用,则使得阀壳体16a的贯通孔16d敞开(开阀)。
由此,排出用止回阀16在供自身配置的波纹管13、14收缩时打开,允许移送流体向从波纹管13、14内部朝向排出通路35的方向(一个方向)的流出。另外,排出用止回阀16在供自身配置的波纹管13、14伸长时关闭,阻止移送流体向从排出通路35朝向波纹管13、14内部的方向(另一方向)的倒流。
[波纹管泵的动作]
接下来,参照图3及图4对本实施方式的波纹管泵10的动作进行说明。此外,在图3及图4中简化示出了第1及第2波纹管13、14的结构。如图3所示,在第1波纹管13收缩、且第2波纹管14伸长的情况下,安装于泵头11的图中左侧的吸入用止回阀15及排出用止回阀16的各阀体15b、16b从第1波纹管13内的移送流体受到压力,分别朝各阀壳体15a、16a的图中右侧移动。由此,吸入用止回阀15关闭,并且排出用止回阀16打开,第1波纹管13内的移送流体从排出通路35向泵外排出。
另一方面,安装于泵头11的图中右侧的吸入用止回阀15的阀体15b因第2波纹管14的吸入作用而向阀壳体15a的图中右侧移动。安装于泵头11的图中右侧的排出用止回阀16的阀体16b因第2波纹管14的吸入作用、以及从第1波纹管13向排出通路35排出的移送流体的按压作用而朝阀壳体16a的图中右侧移动。由此,吸入用止回阀15打开,并且排出用止回阀16关闭,从吸入通路34向第2波纹管14内吸入移送流体。
接下来,如图4所示,在第1波纹管13伸长、第2波纹管14收缩的情况下,安装于泵头11的图中右侧的吸入用止回阀15及排出用止回阀16的各阀体15b、16b从第2波纹管14内的移送流体受到压力,向各阀壳体15a、16a的图中左侧移动。由此,吸入用止回阀15关闭,并且排出用止回阀16打开,第2波纹管14内的移送流体从排出通路35向泵外排出。
另一方面,安装于泵头11的图中左侧的吸入用止回阀15的阀体15b因第1波纹管13的吸入作用而朝阀壳体15a的图中左侧移动。安装于泵头11的图中左侧的排出用止回阀16的阀体16b因第1波纹管13的吸入作用、以及从第1波纹管13向排出通路35排出的移送流体的按压作用而朝阀壳体16a的图中左侧移动。由此,吸入用止回阀15打开,并且排出用止回阀16关闭,从吸入通路34朝第1波纹管13内吸入移送流体。
反复进行以上动作,从而左右的波纹管13、14能够交替地进行移送流体的吸入及排出。
[电磁阀]
在图1中,第1电磁阀4例如由具有一对的螺线管4a、螺线管4b的三通的电磁切换阀构成。各螺线管4a、4b基于从控制部6收到的指令信号而被励磁。由此,第1电磁阀4由控制部6进行切换控制。第1电磁阀4在第1驱动部27中对针对第1排出侧空气室21A的加压空气的供给排出、以及针对第1吸入侧空气室26A的加压空气的供给排出进行切换。
具体而言,如果螺线管4a被励磁,则第1电磁阀4切换为向第1排出侧空气室21A供给加压空气且排出第1吸入侧空气室26A内的加压空气的状态。另外,如果螺线管4b被励磁,则第1电磁阀4切换为排出第1排出侧空气室21A内的加压空气且向第1吸入侧空气室26A供给加压空气的状态。
第2电磁阀5例如由具有一对的螺线管5a、螺线管5b的三通的电磁切换阀构成。各螺线管5a、5b基于从控制部6收到的指令信号而被励磁。由此,第2电磁阀5由控制部6进行切换控制。第2电磁阀5在第2驱动部28中切换针对第2排出侧空气室21B的加压空气的供给排出、以及针对第2吸入侧空气室26B的加压空气的供给排出。
具体而言,如果螺线管5a被励磁,则第2电磁阀5切换为向第2排出侧空气室21B供给加压空气且排出第2吸入侧空气室26B内的加压空气的状态。另外,如果螺线管5b被励磁,则第2电磁阀5切换为排出第2排出侧空气室21B内的加压空气且向第2吸入侧空气室26B供给加压空气的状态。
此外,本实施方式的第1及第2电磁阀4、5由三通的电磁切换阀构成,但也可以是不具有中立位置的两通的电磁切换阀。
[电动气动调节器]
第1电动气动调节器51配置于机械式调节器3与第1电磁阀4之间。第1电动气动调节器51分别对向第1驱动部27的第1吸入侧空气室26A供给的加压空气的气压(第1流体压力)、以及向第1驱动部27的第1排出侧空气室21A供给的加压空气的气压进行调整。
第2电动气动调节器52配置于机械式调节器3与第2电磁阀5之间。第2电动气动调节器52分别对向第2驱动部28的第2吸入侧空气室26B供给的加压空气的气压(第2流体压力)、以及向第2驱动部28的第2排出侧空气室21B供给的加压空气的气压进行调整。
此外,电动气动调节器51、52只要至少调整向排出侧空气室21A、21B供给的加压空气的气压即可。另外,在本实施方式中,作为第1及第2流体压力调整部,使用直接对压力进行调整的电动气动调节器51、52,但也可以利用对空气流量进行调整的空气流量调整阀间接地对气压进行调整,也可以利用对除了空气以外的气体(例如氮气)、液体等的压力或流量进行调整的设备。
[控制部]
在图1及图2中,控制部6构成为具有计算机,该计算机具有CPU等。由CPU执行存储于所述计算机的存储装置的控制程序而发挥控制部6的各功能。控制部6基于第1检测部29及第2检测部31的各检测结果而进行驱动控制、第1升压控制、第2升压控制、第1降压控制、第2降压控制以及上限值的再设定。下面,对上述控制进行说明。
[驱动控制]
控制部6基于第1检测部29及第2检测部31的各检测结果对第1电磁阀4及第2电磁阀5进行切换,由此进行第1驱动部27及第2驱动部28的驱动控制。具体而言,控制部6基于第1检测部29及第2检测部31的各检测结果以如下方式对第1驱动部27及第2驱动部28的各驱动进行控制,即,在第1波纹管13即将达到伸长状态之前使第2波纹管14从收缩状态伸长,并且在第2波纹管14即将达到伸长状态之前使第1波纹管13从收缩状态伸长。
图5是表示控制部6进行的驱动控制的一个例子的时序图。下面,参照图1及图5对控制部6执行的驱动控制进行说明。这里,从第1波纹管13处于收缩动作中(排出中)、且第2波纹管14处于伸长动作中(吸入中)的状态进行说明。在该状态下,第1电磁阀4的螺线管4a被励磁,螺线管4b被消磁。另外,第2电磁阀5的螺线管5a被消磁,螺线管5b被励磁。
在接近传感器31B检测到第2波纹管14的伸长中途状态(ON)的时刻t1,如果接近传感器29A检测到第1波纹管13的收缩状态(ON),则控制部6使第1电磁阀4的螺线管4a消磁且使螺线管4b励磁。此外,即使在接近传感器29A在时刻t1未处于ON的情况下,如果在第2波纹管14变为伸长状态的时刻t2之前接近传感器29A变为ON,则控制部6如上所述使第1电磁阀4的螺线管4a消磁且使螺线管4b励磁。
如果第1电磁阀4的螺线管4b被励磁,则在空气供给装置2中生成的加压空气经由机械式调节器3、第1电动气动调节器51以及第1电磁阀4而供给至第1驱动部27的第1吸入侧空气室26A。由此,在第2波纹管14即将达到伸长动状态之前,第1波纹管13从收缩状态开始伸长动作。
接下来,在从接近传感器31B变为ON的时刻t1起经过了规定的运算时间的时刻t2,控制部6判断为第2波纹管14处于伸长状态。而且,控制部6使第2电磁阀5的螺线管5a励磁且使螺线管5b消磁。如果第2电磁阀5的螺线管5a被励磁,则在空气供给装置2中生成的加压空气经由机械式调节器3、第2电动气动调节器52以及第2电磁阀5而供给至第2驱动部28的第2排出侧空气室21B。由此,第2波纹管14从伸长状态开始收缩动作。
接下来,在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)的时刻t3,如果接近传感器31A检测到第2波纹管14的收缩状态(ON),则控制部6使第2电磁阀5的螺线管5a消磁且使螺线管5b励磁。此外,即使在接近传感器31A在时刻t3未处于ON的情况下,如果在第1波纹管13变为伸长状态的时刻t4之前接近传感器31A变为ON,则控制部6也如上所述,使第2电磁阀5的螺线管5a消磁且使螺线管5b励磁。
如果第2电磁阀5的螺线管5b被励磁,则在空气供给装置2中生成的加压空气经由机械式调节器3、第2电动气动调节器52以及第2电磁阀5而供给至第2驱动部28的第2吸入侧空气室26B。由此,在第1波纹管13即将达到伸长动状态之前,第2波纹管14从收缩状态开始伸长动作。
接下来,在从接近传感器29B变为ON的时刻t3起经过了规定的运算时间的时刻t4,控制部6判断为第1波纹管13处于伸长状态。而且,控制部6使第1电磁阀4的螺线管4a励磁且使螺线管4b消磁。如果第1电磁阀4的螺线管4a被励磁,则在空气供给装置2中生成的加压空气经由机械式调节器3、第1电动气动调节器51以及第1电磁阀4而供给至第1驱动部27的第1排出侧空气室21A。由此,第1波纹管13从伸长状态开始收缩动作。
此后,控制部6反复进行在上述时刻t1~t4分别进行的控制。由此,波纹管泵10以如下方式进行驱动,即,在第2波纹管14即将达到伸长状态之前,第1波纹管13从收缩状态伸长,并且在第1波纹管13即将达到伸长状态之前,使第2波纹管14从收缩状态伸长。
[升压控制]
在所述驱动控制中,例如如果气氛温度降低,则第1波纹管13及第2波纹管14因该影响而变硬,有时第1波纹管13及第2波纹管14的各伸长时间延长。在该情况下,控制部6进行用于使第1波纹管13及第2波纹管14的各伸长时间缩短的第1升压控制及第2升压控制。
具体而言,控制部6基于第1检测部29及第2检测部31的各检测结果,在第1波纹管13伸长至伸长中途状态时进行判定第2波纹管14是否以大于或等于规定时间的时间持续收缩状态的第1判定。在第1判定的判定结果为肯定(以大于或等于规定时间的时间持续收缩状态)的情况下,在下一次的第1波纹管13伸长时,控制部6进行以使得向第1吸入侧空气室26A供给的加压空气的第1气压升高的方式控制第1电动气动调节器51的第1升压控制。
另外,控制部6基于第1检测部29及第2检测部31的各检测结果,在第2波纹管14伸长至伸长中途状态时进行判定第1波纹管13是否以大于或等于规定时间的时间持续收缩状态的第2判定。在第2判定的判定结果为肯定(以大于或等于规定时间的时间持续收缩状态)的情况下,在下一次的第2波纹管14伸长时,控制部6进行以使得向第2吸入侧空气室26B供给的加压空气的第2气压升高的方式控制第2电动气动调节器52的第2升压控制。
优选地,第1及第2升压控制的第1及第2气压的升压程度设为+1kPa~+50kPa(更优选为+1kPa~+20kPa)。
图6是表示利用控制部6在驱动控制中进行的第1及第2升压控制的一个例子的时序图。下面,参照图1及图6对控制部6执行的第1及第2升压控制进行说明。这里,从第1波纹管13处于伸长动作中(吸入中)、且第2波纹管14处于收缩动作中(排出中)的状态进行说明。
在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)之前,控制部6判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)。这里,在第1波纹管13达到伸长中途状态之前的时刻t20,接近传感器31A检测到第2波纹管14的收缩状态,因此控制部6判定为接近传感器31A变为ON。
在判定为接近传感器31A变为ON的情况下,控制部6进一步在接近传感器29B检测到第1波纹管13的伸长中途状态的时刻t21,判定接近传感器31A是否从检测到第2波纹管14的收缩状态的时刻t20起持续了大于或等于规定时间T的时间(第1判定)。这里,在时刻t21经过了规定时间T,因此控制部6判定为从时刻t20起持续了大于或等于规定时间T的时间。根据该判定结果,如后所述,控制部6在下一次的第1波纹管13伸长时(时刻t24~时刻t27)执行第1升压控制。
如果在所述时刻t21接近传感器29B变为ON,则通过上述驱动控制在第1波纹管13变为伸长状态之前(伸长中途状态)使得第2波纹管14从收缩状态开始伸长动作。然后,第1波纹管13在时刻t22变为伸长状态而开始收缩动作。
接下来,在接近传感器31B检测到第2波纹管14的伸长中途状态(ON)之前,控制部6判定接近传感器29A是否检测到第1波纹管13的收缩状态(ON)。这里,在第2波纹管14达到伸长中途状态之前的时刻t23,接近传感器29A检测到第1波纹管13的收缩状态,因此控制部6判定为接近传感器29A变为ON。
在判定为接近传感器29A变为ON的情况下,控制部6进一步在接近传感器31B检测到第2波纹管14的伸长中途状态的时刻t24,判定接近传感器29A是否从检测到第1波纹管13的收缩状态的时刻t23起持续了大于或等于规定时间T的时间(第2判定)。这里,在时刻t24经过了规定时间T,因此控制部6判定为从时刻t23起持续了大于或等于规定时间T的时间。根据该判定结果,如后所述,控制部6在下一次的第2波纹管14伸长时(时刻t27~时刻t29)执行第2升压控制。
如果在所述时刻t23接近传感器29A变为ON,则通过上述驱动控制,在第2波纹管14变为伸长状态之前(伸长中途状态)使得第1波纹管13从收缩状态开始伸长动作。然后,第2波纹管14在时刻t25变为伸长状态而开始收缩动作。
在第1波纹管13在所述时刻t23开始伸长动作时,在所述时刻t21进行的第1判定的判定结果为肯定(判定为从接近传感器31A变为ON的时刻t20起持续了大于或等于规定时间T的时间),因此控制部6执行以使得供给至第1吸入侧空气室26A的加压空气的第1气压升高的方式对第1电动气动调节器51进行控制的第1升压控制。
具体而言,控制部6以如下方式对第1电动气动调节器51进行控制,即,使得供给至第1吸入侧空气室26A的加压空气的第1气压变为比上一次(时刻t22以前)的值P11高的值P12。由此,第1波纹管13的伸长速度比上一次的第1波纹管13的伸长动作时的伸长速度快。
接下来,在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)之前,控制部6判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)。这里,如上所述,第1波纹管13的伸长速度加快,第1波纹管13的伸长时间缩短,从而第2波纹管14在第1波纹管13达到伸长中途状态的时刻t26达到收缩状态。
因此,在第1波纹管13达到伸长中途状态之前,接近传感器31A未检测到第2波纹管14的收缩状态(OFF),控制部6判定为接近传感器31A未变为ON。根据该判定结果,在第1波纹管13达到伸长中途状态的时刻t26,不进行基于控制部6的第2判定,因此在下一次的第1波纹管13伸长时不执行第1升压控制。
接下来,如果在时刻t26接近传感器29B及接近传感器31A均变为ON,则通过上述驱动控制在第1波纹管13变为伸长状态之前(伸长中途状态),第2波纹管14从收缩状态开始伸长动作。然后,第1波纹管13在时刻t27变为伸长状态而开始收缩动作。
在第2波纹管14在所述时刻t26开始伸长动作时,在所述时刻t24进行的第2判定的判定结果为肯定(判定为接近传感器29A从变为ON的时刻t23起持续了大于或等于规定时间T的时间),因此控制部6执行以使得供给至第2吸入侧空气室26B的加压空气的第2气压升高的方式对第2电动气动调节器52进行控制的第2升压控制。
具体而言,控制部6以使得供给至第2吸入侧空气室26B的加压空气的第2气压达到比上一次(时刻t21~时刻t25)的值P21更高的值P22的方式,对第2电动气动调节器52进行控制。由此,第2波纹管14的伸长速度比上一次的第2波纹管14的伸长动作时的伸长速度快。
接下来,在接近传感器31B检测到第2波纹管14的伸长中途状态(ON)之前,控制部6判定接近传感器29A是否检测到第1波纹管13的收缩状态(ON)。这里,如上所述,第2波纹管14的伸长速度加快,第2波纹管14的伸长时间缩短,从而第1波纹管13在第2波纹管14达到伸长中途状态的时刻t28达到收缩状态。
因此,在第2波纹管14达到伸长中途状态之前,接近传感器29A未检测到第1波纹管13的收缩状态(OFF),因此控制部6判定为接近传感器29A未变为ON。根据该判定结果,在第2波纹管14达到伸长中途状态的时刻t28,不进行基于控制部6的第2判定,因此在下一次的第2波纹管14伸长时不执行第2升压控制。
[降压控制]
在上述驱动控制中,例如如果气氛温度升高,则因其影响而使得第1波纹管13及第2波纹管14变软,有时第1波纹管13及第2波纹管14的各伸长时间缩短。在该情况下,控制部6进行用于使第1波纹管13及第2波纹管14的各伸长时间延长的第1降压控制及第2降压控制。
具体而言,控制部6基于第1检测部29及第2检测部31的各检测结果,在第1波纹管13伸长至伸长中途状态时进行判定第2波纹管14是否处于收缩状态的第3判定。在第3判定的判定结果为否定(并非收缩状态)的情况下,在下一次的第1波纹管13伸长时,控制部6进行以使得供给至第1吸入侧空气室26A的加压空气的第1气压降低的方式对第1电动气动调节器51进行控制的第1降压控制。
另外,控制部6基于第1检测部29及第2检测部31的各检测结果,在第2波纹管14伸长至伸长中途状态时进行判定第1波纹管13是否处于收缩状态的第4判定。在第4判定的判定结果为否定(并非收缩状态)的情况下,在下一次的第2波纹管14伸长时,控制部6进行以使得供给至第2吸入侧空气室26B的加压空气的第2气压降低的方式对第2电动气动调节器52进行控制的第2降压控制。
优选地,第3及第4判定的所述规定时间例如设定为500msec(优选为10~200msec)的值。
优选地,第1及第2降压控制的第1及第2气压的降压程度设为-1kPa~-50kPa(更优选为-1kPa~-20kPa)。
图7是表示由控制部6在驱动控制中进行的第1及第2降压控制的一个例子的时序图。下面,参照图1及图7对控制部6执行的第1及第2降压控制进行说明。这里,从第1波纹管13处于伸长动作中(吸入中)且第2波纹管14处于收缩动作中(排出中)的状态进行说明。
控制部6在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)的时刻t41判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)(第3判定)。这里,在时刻t41,接近传感器31A未检测到第2波纹管14的收缩状态(OFF),因此控制部6判定为接近传感器31A未变为ON。根据该判定结果,如后所述,控制部6在下一次的第1波纹管13伸长时(时刻t45~时刻t48)执行第1降压控制。
在所述第3判定之后,在第1波纹管13的伸长动作中的时刻t42,如果接近传感器31A变为ON,则通过上述驱动控制在第1波纹管13即将达到伸长状态之前(伸长中途状态)使第2波纹管14从收缩状态开始伸长动作。然后,第1波纹管13在时刻t43变为伸长状态而开始收缩动作。
接下来,在接近传感器31B检测到第2波纹管14的伸长中途状态(ON)的时刻t44,控制部6判定接近传感器29A是否检测到第1波纹管13的收缩状态(ON)(第4判定)。这里,在时刻t44,接近传感器29A未检测到第1波纹管13的收缩状态(OFF),因此控制部6判定为接近传感器29A未变为ON。根据该判定结果,如后所述,控制部6在下一次的第2波纹管14伸长时(时刻t47~时刻t50)执行第2降压控制。
在所述第4判定之后,在第2波纹管14的伸长动作中的时刻t45,如果接近传感器29A变为ON,则通过上述驱动控制在第2波纹管14即将达到伸长状态之前(伸长中途状态)使第1波纹管13从收缩状态开始伸长动作。然后,第2波纹管14在时刻t46变为伸长状态而开始收缩动作。
在第1波纹管13在所述时刻t45开始伸长动作时,在时刻t41进行的第3判定的判定结果为否定(判定为接近传感器31A为变为ON),因此控制部6执行以使得供给至第1吸入侧空气室26A的加压空气的第1气压降低的方式对第1电动气动调节器51进行控制的第1降压控制。
具体而言,控制部6以使得供给至第1吸入侧空气室26A的加压空气的第1气压变为比上一次(时刻t43以前)的值P11更低的值P13的方式对第1电动气动调节器51进行控制。由此,第1波纹管13的伸长速度比上一次的第1波纹管13的伸长速度慢。
接下来,在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)的时刻t47,控制部6判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)(第3判定)。这里,如上所述,第1波纹管13的伸长速度减慢,第1波纹管13的伸长时间延长,从而第2波纹管14在时刻t47达到收缩状态。因此,接近传感器31A在时刻t47检测到第2波纹管14的收缩状态,因此控制部6判定为接近传感器31A变为ON。根据该判定结果,控制部6在下一次的第1波纹管13伸长时不执行第1降压控制。
如果接近传感器29B及接近传感器31A在所述时刻t47均变为ON,则通过上述驱动控制在第1波纹管13即将达到伸长状态之前(伸长中途状态)使第2波纹管14从收缩状态开始伸长动作。然后,第1波纹管13在时刻t48变为伸长状态而开始收缩动作。
在第2波纹管14在所述时刻t47开始伸长动作时,在所述时刻t44进行的第4判定的判定结果为否定(判定为接近传感器29A未变为ON),因此控制部6执行以使得供给至第2吸入侧空气室26B的加压空气的第2气压降低的方式对第2电动气动调节器52进行控制的第2降压控制。
具体而言,控制部6以使得供给至第2吸入侧空气室26B的加压空气的第2气压变为比上一次(时刻t42~时刻t46)的值P21更低的值P23的方式对第2电动气动调节器52进行控制。由此,第2波纹管14的伸长速度比上一次的第2波纹管14的伸长速度慢。
接下来,在接近传感器31B检测到第2波纹管14的伸长中途状态(ON)的时刻t49,控制部6判定接近传感器29A是否检测到第1波纹管13的收缩状态(ON)(第4判定)。这里,如上所述,第2波纹管14的伸长速度减慢,第2波纹管14的伸长时间延长,从而第1波纹管13在时刻t49达到收缩状态。因此,接近传感器29A在时刻t49检测到第1波纹管13的收缩状态,因此控制部6判定为接近传感器29A变为ON。根据该判定结果,控制部6在下一次的第2波纹管14伸长时不执行第2降压控制。
[上限值的再设定]
可以认为,在进行了第1及第2升压控制的情况下,供给至第1吸入侧空气室26A(第2吸入侧空气室26B)的加压空气的第1气压(第2气压)大于或等于所需程度地升高。在该情况下,第1波纹管13(第2波纹管14)的伸长时间变得过短,即使第1波纹管13(第2波纹管14)伸长至伸长状态,也有可能引起第2波纹管14(第1波纹管13)未达到收缩状态的情况。由此,无法正常地进行所述驱动控制,有可能在波纹管泵10的吸入侧产生冲击压力、气穴。
因此,在通过第1及第2升压控制使得供给至第1吸入侧空气室26A(第2吸入侧空气室26B)的加压空气的第1气压(第2气压)大于或等于所需程度地升高的情况下,在下一次的第1波纹管13(第2波纹管14)伸长时,控制部6对基于第1电动气动调节器51(第2电动气动调节器52)的第1气压(第2气压)的调整范围的上限值进行再设定。
具体而言,控制部6基于第1检测部29及第2检测部31的各检测结果,在第1波纹管13伸长至伸长状态时进行判定第2波纹管14是否处于收缩状态的第5判定。在第5判定的判定结果为否定(并非收缩状态)的情况下,在下一次的第1波纹管13伸长时,控制部6将基于第1电动气动调节器51的第1气压的调整范围的上限值设定为比上一次的第1波纹管13伸长时的第1气压低。
另外,控制部6基于第1检测部29及第2检测部31的各检测结果,在第2波纹管14伸长至伸长状态时进行判定第1波纹管13是否处于收缩状态的第6判定。在第6判定的判定结果为否定(并非收缩状态)的情况下,在下一次的第2波纹管14伸长时,控制部6将基于第2电动气动调节器52的第2气压的调整范围的上限值设定为比上一次的第2波纹管14伸长时的第2气压低。
优选地,第1及第2气压的调整范围的上限值的设定程度设为+1kPa~+50kPa(更优选为+5kPa~+20kPa)。此外,当然第1及第2气压的调整范围的下限值为固定值,即使再设定上限值,也不会使得下限值变更。这样再设定的上限值在下下次以后的第1波纹管13(第2波纹管14)伸长时也用作基于第1电动气动调节器51(第2电动气动调节器52)的第1气压(第2气压)的调整范围的上限值。
图8是表示在利用控制部6进行第1升压控制之后对基于第1电动气动调节器51的第1气压的调整范围的上限值进行再设定的一个例子的时序图。下面,参照图1及图8对控制部6执行的所述上限值的再设定进行说明。此外,关于图8中的时刻t60至时刻t63之间进行的第1电动气动调节器51的控制,与图6中的时刻t20至时刻t23之间进行的控制相同,因此省略说明。另外,关于图8中进行的第2电动气动调节器52的控制,与图6中进行的控制相同,因此省略说明。
控制部6在接近传感器31B检测到第2波纹管14的伸长中途状态的时刻t64,通过上述驱动控制而开始第1波纹管13的伸长动作。此时,控制部6执行以使得供给至第1吸入侧空气室26A的加压空气的第1气压升高的方式对第1电动气动调节器51进行控制的第1升压控制。具体而言,控制部6以使得供给至第1吸入侧空气室26A的加压空气的第1气压变为比上一次(时刻t62以前)的值P11更高的值P14的方式,对第1电动气动调节器51进行控制。由此,第1波纹管13的伸长速度比上一次的第1波纹管13的伸长动作时的伸长速度快。
接下来,在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)之前,控制部6判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)。这里,如上所述,第1波纹管13的伸长速度加快,第1波纹管13的伸长时间缩短,从而第2波纹管14在第1波纹管13达到伸长中途状态的时刻t66也处于收缩动作中。
因此,在第1波纹管13达到伸长中途状态之前,接近传感器31A未检测到第2波纹管14的收缩状态(OFF),因此控制部6判定为接近传感器31A未变为ON。根据该判定结果,在第1波纹管13达到伸长中途状态的时刻t66,不进行基于控制部6的第1判定,因此在下一次的第1波纹管13伸长时不执行第1升压控制。
接下来,在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)的时刻t66,控制部6判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)(第3判定)。这里,在时刻t66,接近传感器31A未检测到第2波纹管14的收缩状态(OFF),因此控制部6判定为接近传感器31A未变为ON。根据该判定结果,如后所述,控制部6在下一次的第1波纹管13伸长时(时刻t69~时刻t72)执行第1降压控制。
接下来,在从接近传感器29B变为ON的时刻t66起经过了规定的运算时间的时刻t67,如果判断为第1波纹管13变为伸长状态,则控制部6判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)(第5判定)。这里,第2波纹管14在时刻t67未达到收缩状态,因此控制部6判定为接近传感器31A未变为ON。根据该判定结果,如后所述,控制部6在下一次的第1波纹管13伸长时(时刻t69~时刻t72),对基于第1电动气动调节器51的第1气压的调整范围的上限值进行再设定。
如果第1波纹管13在所述时刻t67变为伸长状态,则控制部6通过上述驱动控制而开始第1波纹管13的收缩动作。然后,在时刻t69,如果接近传感器29A检测到第1波纹管13的收缩状态,则控制部6通过上述驱动控制而开始第1波纹管13的伸长动作。此时,在所述时刻t67进行的第5判定的判定结果为否定(判定为接近传感器31B未变为ON),因此控制部6对基于第1电动气动调节器51的第1气压的调整范围的上限值进行再设定。
具体而言,控制部6将基于第1电动气动调节器51的第1气压的调整范围的上限值Pu设定为比在上一次的第1波纹管13伸长时(时刻t64~时刻t67)通过第1升压控制而供给至第1吸入侧空气室26A的加压空气的第1气压的值P14更低的气压(这里为值P12)。
在上限值Pu的再设定之后,在所述时刻t66进行的第3判定的判定结果为否定(判定为接近传感器31A未变为ON),因此控制部6进一步执行以使得供给至第1吸入侧空气室26A的加压空气的第1气压降低的方式对第1电动气动调节器51进行控制的第1降压控制。
具体而言,控制部6以使得供给至第1吸入侧空气室26A的加压空气的第1气压低于上一次(时刻t64~时刻t67)的值P14、且低于再设定的上限值Pu(P12)的方式对第1电动气动调节器51进行控制。这里,控制部6以使得第1气压达到上限值Pu(P12)的方式对第1电动气动调节器51进行控制。由此,第1波纹管13的伸长速度比上一次的第1波纹管13的伸长速度慢。
接下来,在接近传感器29B检测到第1波纹管13的伸长中途状态(ON)之前,控制部6判定接近传感器31A是否检测到第2波纹管14的收缩状态(ON)。这里,如上所述,第1波纹管13的伸长速度减慢,第1波纹管13的伸长时间延长,从而在第1波纹管13达到伸长中途状态的时刻t71,第2波纹管14达到收缩状态。
因此,在第1波纹管13达到伸长中途状态之前,接近传感器31A未检测到第2波纹管14的收缩状态(OFF),因此控制部6判定为接近传感器31A未变为ON。根据该判定结果,在第1波纹管13达到伸长中途状态的时刻t71,不进行基于控制部6的第1判定,因此在下一次的第1波纹管13伸长时不执行第1升压控制。
另外,在下一次以后的第1波纹管13伸长时,以上述方式再设定的上限值Pu用作基于第1电动气动调节器51的第1气压的调整范围的上限值。因此,即使在下一次以后的第1波纹管13伸长时执行第1升压控制,因该第1升压控制而升高的第1气压也不会高于上限值Pu。
在图8的控制例中,基于在时刻t67进行的第5判定的判定结果,在下一次的第1波纹管13伸长时(时刻t69~时刻t72)对基于第1电动气动调节器51的第1气压的调整范围的上限值进行再设定,但在下一次的第1波纹管13伸长时不进行该上限值的再设定,因此可以在下下次的第1波纹管13伸长时进行。其理由在于,在下一次的第1波纹管13伸长时,如上所述,执行第1降压控制,即使不对所述上限值进行再设定,也利用第1电动气动调节器51使得第1气压降低。
在下下次的第1波纹管13伸长时对所述上限值进行再设定的情况下,在下下次以后的第1波纹管13伸长时,再设定的上限值Pu用作基于第1电动气动调节器51的第1气压的调整范围的上限值。因此,即使在下下次以后的第1波纹管13伸长时执行第1升压控制,通过该第1升压控制而升高的气压也不会高于上限值Pu。此外,可以在下一次以及下下次的第1波纹管13伸长时不进行所述上限值的再设定,而是在下下次以后的第1波纹管13伸长时进行。
此外,在图8的控制例中,说明了对基于第1电动气动调节器51的第1气压的调整范围的上限值进行再设定的情况,但在对基于第2电动气动调节器52的第2气压的调整范围的上限值进行再设定的情况下也与上述相同,因此省略说明。
[本实施方式的作用效果]
如上所述,根据本实施方式的波纹管泵装置1,控制部6进行如下驱动控制,即,在第1波纹管13即将达到伸长状态之前使第2波纹管14从收缩状态伸长(吸入),并且在第2波纹管14即将达到伸长状态之前使第1波纹管13从收缩状态伸长(吸入)。由此,在第1波纹管13(第2波纹管14)的从吸入向排出的切换定时,第2波纹管14(第1波纹管13)已经伸长而吸入移送流体,因此在所述切换定时不会切断将移送流体向波纹管泵10吸入的液体的流动。其结果,能够抑制在移送流体的从吸入向排出的切换时产生冲击压力、气穴。
另外,利用第1电动气动调节器51(第2电动气动调节器52)对供给至第1吸入侧空气室26A(第2吸入侧空气室26B)的加压空气的第1气压(第2气压)进行调整,从而能够调整第1波纹管13(第2波纹管14)的伸长速度。
在上述驱动控制中,在第1波纹管13(第2波纹管14)伸长至伸长中途状态时,有时第2波纹管14(第1波纹管13)的收缩状态持续大于或等于规定时间的时间。在该情况下,控制部6在下一次的第1波纹管13(第2波纹管14)伸长时进行使得供给至第1吸入侧空气室26A(第2吸入侧空气室26B)的加压空气的第1气压(第2气压)升高的第1升压控制(第2升压控制)。由此,在第1波纹管13(第2波纹管14)的伸长时间大于或等于所需程度地延长时,能够将用于使第1波纹管13(第2波纹管14)伸长的第1气压(第2气压)自动地重新设定为较高的值。其结果,下一次的第1波纹管13(第2波纹管14)的伸长时间缩短,因此能够抑制波纹管泵10的排出侧的脉动变差。
在上述驱动控制中,在第1波纹管13(第2波纹管14)伸长至伸长中途状态时,有时第2波纹管14(第1波纹管13)未收缩至收缩状态。在该情况下,控制部6在下一次的第1波纹管13(第2波纹管14)伸长时进行使得供给至第1吸入侧空气室26A(第2吸入侧空气室26B)的加压空气的第1气压(第2气压)降低的第1降压控制(第2降压控制)。由此,在第1波纹管13(第2波纹管14)的伸长时间缩短时,能够将用于使第1波纹管13(第2波纹管14)伸长的第1气压(第2气压)自动地重新设定为较低的值。其结果,下一次的第1波纹管13(第2波纹管14)的伸长时间延长而伸长速度减慢,因此能够进一步抑制在波纹管泵10的吸入侧产生冲击压力、气穴。
在控制部6进行了第1升压控制(第2升压控制)的情况下,第1波纹管13(第2波纹管14)的伸长时间变得过短,在第1波纹管13(第2波纹管14)伸长至伸长状态时,有时第2波纹管14(第1波纹管13)未收缩至收缩状态。在该情况下,控制部6以如下方式进行再设定,即,使得下一次的第1波纹管13(第2波纹管14)伸长时的第1气压(第2气压)的调整范围的上限值比上一次的第1波纹管13(第2波纹管14)伸长时的第1气压(第2气压)低。由此,能够限制在下一次的第1波纹管13(第2波纹管14)伸长时由第1电动气动调节器51(第2电动气动调节器52)调整的第1气压(第2气压)高于上限值,因此能够抑制第1波纹管13(第2波纹管14)的伸长时间变得过短。其结果,能够进一步抑制在波纹管泵10的吸入侧产生冲击压力、气穴。
另外,下一次的第1波纹管13(第2波纹管14)伸长时再设定的所述上限值即使在下下次以后的第1波纹管13(第2波纹管14)伸长时,也用作基于第1电动气动调节器51(第2电动气动调节器52)的第1气压(第2气压)的调整范围的上限值。因此,即使在下下次以后的第1波纹管13(第2波纹管14)伸长时执行第1升压控制(第2升压控制),升高的第1气压(第2气压)也不会低于上限值。因此,因第1升压控制(第2升压控制)而使得第1波纹管13(第2波纹管14)的伸长时间缩短,能够抑制无法执行上述驱动控制。其结果,能够进一步抑制在波纹管泵10的吸入侧产生冲击压力、气穴。
通过第1升压控制(第2升压控制),在第1波纹管13(第2波纹管14)伸长至伸长状态时,在第2波纹管14(第1波纹管13)未收缩至收缩状态的情况下,控制部6可以以如下方式进行再设定,即,使得下下次的第1波纹管13(第2波纹管14)伸长时的第1气压(第2气压)的调整范围的上限值低于上一次的第1波纹管13(第2波纹管14)伸长时的第1气压(第2气压)。在下一次的第1波纹管13(第2波纹管14)伸长时执行第1降压控制(第2降压控制),即使不对所述上限值进行再设定,也因第1电动气动调节器51(第2电动气动调节器52)而使得第1气压(第2气压)降低。由此,能够限制在下下次的第1波纹管13(第2波纹管14)伸长时由第1电动气动调节器51(第2电动气动调节器52)调整的第1气压(第2气压)高于上限值Pu,因此能够抑制第1波纹管13(第2波纹管14)的伸长时间变得过短。其结果,能够进一步抑制在波纹管泵1的吸入侧产生冲击压力、气穴。
另外,在下下次的第1波纹管13(第2波纹管14)伸长时再设定的所述上限值,即使在下下次以后的第1波纹管13(第2波纹管14)伸长时也用作基于第1电动气动调节器51(第2电动气动调节器52)的第1气压(第2气压)的调整范围的上限值。因此,即使在下下次以后的第1波纹管13(第2波纹管14)伸长时执行第1升压控制(第2升压控制),升高的第1气压(第2气压)也不会低于上限值。因此,因第1升压控制(第2升压控制)而使得第1波纹管13(第2波纹管14)的伸长时间缩短,能够抑制无法执行上述驱动控制。其结果,能够进一步抑制在波纹管泵10的吸入侧产生冲击压力、气穴。
[其他]
上述实施方式的控制部6进行驱动控制、第1以及第2升压控制、第1以及第2降压控制、以及上限值的再设定,但只要至少进行驱动控制即可。在控制部6仅进行驱动控制的情况下,波纹管泵装置1无需具有第1以及第2电动气动调节器5152,可以利用机械式调节器3以手动方式对加压空气的气压进行调整。
上述实施方式的第1检测部29以及第2检测部31对波纹管13、14的伸长中途状态以及收缩状态进行检测,但并不限定于此。例如,第1检测部29以及第2检测部31可以对波纹管13、14的伸长状态以及收缩中途状态(变为收缩状态之前的状态)进行检测。在该情况下,波纹管泵装置的控制部6基于检测伸长状态及收缩中途状态的第1及第2检测部29、31的各检测结果而进行在第1波纹管13(第2波纹管14)即将达到收缩状态之前使第2波纹管14(第1波纹管13)从伸长状态收缩的控制,在想到要能够选择性地进行该控制以及本发明的驱动控制时,能够简单地追加本发明的驱动控制,这一点特别有效。
第1检测部29以及第2检测部31并不限定于上述实施方式的接近传感器29A、29B、31A、31B。例如,第1检测部29以及第2检测部31可以由利用激光等的位移传感器构成。
应当理解,此次公开的实施方式在所有方面都是示例,并未对本发明加以限制。本发明的范围并非由上述实施方式表示,而是由权利要求书表示,意图包含与权利要求书等同的范围、以及范围内的所有变更。
标号的说明
1 波纹管泵装置
6 控制部
13 第1波纹管
14 第2波纹管
26A 第1吸入侧空气室(第1吸入侧空气室)
26B 第2吸入侧空气室(第2吸入侧空气室)
27 第1驱动部
28 第2驱动部
29 第1检测部
31 第2检测部
51 第1电动气动调节器(第1流体压力调整部)
52 第2电动气动调节器(第2流体压力调整部)。