一种模块化无人智能拖轮结构
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及一种无人智能拖轮结构,更具体地,涉及模块化无人智能拖轮结构。
背景技术
船舶的无人化是船舶业发展的大趋势,因此作为港口活动较多的港作拖轮来说,无人港作拖轮是一个值得研究的方向。然而其发展需要很多的技术支持,包括控制系统、推进系统、导航系统等,最重要的还是拖轮自身的结构设计。
传统的港作拖轮结构固定,均由人工操作,且每艘拖轮之间相互独立,仅通过人工协调完成拖曳、顶推工作。但是人工操作需要在拖轮端配置人工操作的平台和装置,这样不仅耗费更多的资源,而且增加了拖轮的结构和操作复杂程度。因此,考虑到这些不足,需要一种新型的拖轮结构,简化结构设计,满足基本拖轮要求,并且在进行拖曳、顶推作业过程中能做到协同,形成集群作业模式。
发明内容
有鉴于此,针对上述传统拖轮存在的不足,本发明设计了一种模块化无人智能拖轮结构,为拖轮结构和工作方式的多样化提供了新的思路和途径。
为解决上述问题,本发明采用的技术方案在于,拖轮采用多模块化设计,当不进行拖航作业时,各模块可单独作业,实现不同的功能,也可以在岸边搭建成运输平台或停靠在岸边进行充电,当进行拖航作业时,模块任意组合成需求的大小,模块之间协同工作实现功能。
为了实现上述目的,本发明采用了如下技术方案:一种模块化无人智能拖轮结构,即拖轮采用模块化结构设计;其中:所述模块化无人智能拖轮由控制中心进行控制,单一拖轮模块可以自主运行,通过控制中心发送的指令执行不同任务,多拖轮模块也可根据需要任意组合,形成集群作业模式,实现拖轮相关功能。
所述模块化无人智能拖轮结构主要包括:甲板、矩形基座、推进器。
所述推进器采用吊舱式全回转推进器,安装在船体底部中心位置,能将良好的操纵性、创新的制导控制、优越的推进性能和低噪声结合起来,从而提高拖轮的工作效率。
所述矩形基座分布有无人智能拖轮的控制模块、供电模块、通信模块、能源管理模块、新能源发电模块、推进电机等,用来控制拖轮的基本运行,实现无人操作、自主运行。
所述甲板上配备拖轮的基本作业设施:平铺的太阳能板用来吸收太阳能发电,太阳能板四周均匀分布了风力发电风车,将机械能转化为电能供电,风车不仅能够在一个平面内转动,还能跟随风向杆旋转,使得最大程度地利用风能发电;最外面一圈围绕的是拖缆的自动连接装置,也就是执行连接拖缆任务的智能小车以及小车的运行导轨。
所述拖轮模块四周安装自动对接装置,用来执行多模块之间或模块与基站之间的自动对接;主要包括自动对接装置、安装机构,自动对接装置分为公头装置和母头装置,安装机构主要包括连接锥体和旋转球,所述公头和母头对接装置分别固定在旋转球的两个方向上,一同焊接在锥体上,锥体水平焊接固定在无人船体的四周。
所述拖缆的自动连接装置,包括智能小车与小车移动导轨,安装于拖轮甲板四周,智能小车包括含有控制模块、供电模块、检测模块的小车基座、上层建筑、固定在上层建筑上的固定圆环。
所述模块化无人智能拖轮,充分利用新能源,在拖轮甲板上安装有太阳能板、电力风车用来供电,并利用柴油发电,形成多能源混合电力推进系统,并对多能源进行能源管理,合理、高效发电。
基于上述技术方案,本发明的优点是:相比传统拖轮,本发明设计的拖轮更具有灵活性,符合绿色化、智能化的发展方向,既可单独完成任务,也可以任意组合形成多模块进行协同作业。此新型模块化拖轮结构可以根据需要组合成不同的工作模式,按照动力分配、控制分配等进行协同工作,集群作业时也可根据控制分配各拖轮组合,进行统一的拖曳、顶推工作,无需人工。此拖轮动力系统以电力为主,新能源与柴油机发电为辅,根据能源管理合理发电,在充分利用新能源的同时,节约能源,符合绿色发展理念。减少人工操作平台,为拖轮其他模块提供了更多的空间,拖轮的发展也更加广泛。
附图说明
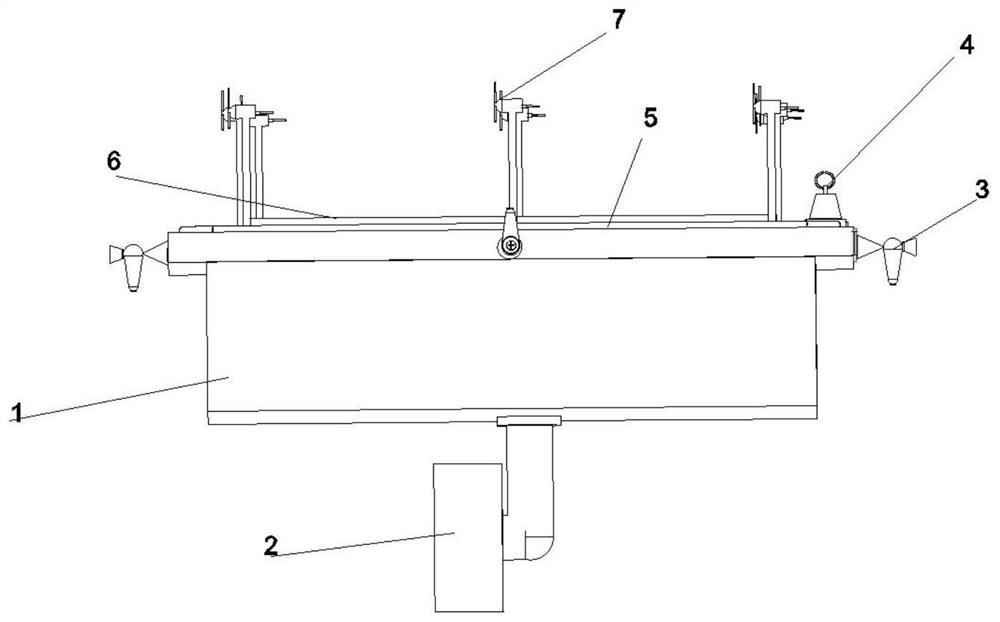
图1为单模块拖轮整体示意图;
图2为单模块拖轮三视图;
图3为基座内部模块分布示意图;
图4为吊舱式全回转推进器示意图;
图5为组合拖轮示意图1;
图6为组合拖轮示意图2;
图7为组合拖轮示意图3。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供一种模块化无人智能拖轮结构。该装置可以根据被拖轮需要实现不同的模块组合方式,形成不同的拖轮工作结构,并对这些拖轮进行协同控制,实现拖曳、顶推工作,无需人工。
如图1所示,一种模块化无人智能拖轮结构,包括基本船体、推进器,如图2所示为模块化拖轮的三视图。
所述基本船体有一个矩形基座1,如图3所示,内部分布有控制模块8、供电模块9、通信模块10等,用来完成无人操作模块的基本运行。基座底部安装了一个吊舱式全回转推进器2,如图4所示,实现拖轮模块的推进性能和可操作性性能。
所述模块化拖轮的基座表面为拖轮模块甲板,安装有太阳能板6、风车7用以进行新能源供电,甲板上还铺设有自动收放拖缆的装置4及其运行导轨5。拖轮模块的四周安装有自动连接装置3,用来进行模块之间的对接,或模块与岸边基站之间的对接。
所述单个拖轮模块由控制系统8、推进系统11、供电系统9等组成。拖轮端与岸端之间的通信主要采用无线网络,在基站网络无法实现的范围内,切换为北斗卫星通信。
单模块可通过拖轮甲板四周安装的自动对接装置完成模块之间的任意组合,如图1所示组合成了三体拖轮,如图2所示组合成并行结构,如图3所示组合成穿行结构。
拖轮与被拖轮之间拖缆的连接可通过拖轮模块甲板上安装的拖缆的自动连接装置完成,包括智能小车与小车移动导轨,智能小车包括含有控制模块、供电模块、检测模块的小车基座、上层建筑、固定在上层建筑上的固定圆环,小车跟随拖缆释放后的位置在导轨上运行,运行到离此位置最近的地方进行锁闭,此时固定圆环开始运行,随拖缆方向进行旋转,稳定后等待拖缆的越过,圆环中的红外线检测到拖缆越过后锁紧圆环,完成连接。
综上所述,本发明提供了一种模块化无人智能拖轮结构。区别于传统拖轮,本发明设计的拖轮具有灵活性,符合绿色化、智能化的发展方向,既可单独完成任务,也可以任意组合进行协同作业。
本领域普通技术人员可以理解:附图只是便于读者理解,附图中的模块或流程不一定是实施本发明所必须的。
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
- 一种模块化无人智能拖轮结构
- 一种模块化无人智能拖轮的控制方法