一种三点控制笔杆整理笔毛连续书写的装置及方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及书法机器人,特别涉及一种三点控制笔杆整理笔毛连续书写的装置及方法,本装置可模仿人手的三指握笔的松紧度,以三点磁吸控制笔杆来驱动毛笔的前锋及在连续书写中能始终保持笔毛弹性,并在改变行笔不同方向时都能保持笔锋以平行排序状态收放和移动。
背景技术
现有技术,执毛笔书写的机械臂,其控制笔杆有五指握,一点握或两点握,一点,二点握不能如仿生人手指控制笔杆。五指握则解决不了争论千年的因须掌竖腕平而直接阻碍了了手腕及臂的功能。传说千年的三指执笔却失落历史考证,为此发明人历经了数十年的探索实验,并研究将其运用于书法机器人,使得书法机器人在连续运笔中笔锋保持不同方向平行排序,得到工业化应用。
现有技术写字机器人握笔都采用紧固件完全紧固的状态,缺少应用教学及探索人工智能模仿人在艺术实践中思想与硬件柔性关系的能力。现有技术缺少在不间断连续书写的状态下始终保持笔毛弹性的操作方法。现有技术不能做到在不间断连续书写的情况下笔锋无论如何转向都保持平行排序的状态,而时常要到砚台或取墨器等载体上整理笔毛。现有技术也做不到在连续运动中以平行排序状态中收放笔锋,也要借助上述载体整理笔毛。
发明内容
本发明的目的是提供一种三点控制笔杆整理笔毛连续书写的装置及方法,主要解决执毛笔书写的机械臂缺少三点控制笔杆,以及无法在书写过程中通过控制笔杆保持笔毛弹性并在改变行笔不同方向时都能保持笔锋以平行排序状态收放和移动的技术问题。
本发明的技术方案是,一种三点控制笔杆整理笔毛连续书写的装置,包括:连接机械臂的执行末端连接体,执行末端连接体通过软性接圈连接总连杆,总连杆另一端连接总轴承柱,总轴承柱自上而下转动连接三个中连杆,所述三个中连杆分别可转动连接三个中轴承柱,中轴承柱通过前连杆可转动连接前轴承柱,三个前轴承柱上设有磁吸金属体,磁吸金属体端部设有带胶磁铁,所述带胶磁铁通过可替换型不干胶层连接毛笔杆。
各磁吸金属体与带胶磁铁可分离;带胶磁铁附着的是可替换型不干胶层。也可适用于不同类别的书写工具及设置不同磁性能的构件。
本发明部件除磁吸构件外,优选铝合金材质,且表面进行阳极氧化处理。
总轴承柱、中轴承柱和前轴承柱上轴承通过销轴转动连接。
当笔杆置以其他介质,本发明可选用更先进的数字模拟接口,以对古今书法专业人士的创作意识的探索,提供新的选项。
所述装置的整理笔毛书写方法,在可展开书写的毛笔头含有液体的状态下,毛笔头呈笔尖垂直触及平面触体点为启动坐标点,以毛笔头笔毛10%至40%的高度为笔杆下压限制高度,三个带胶磁铁带动笔杆同时下按至笔毛纵向平行排序的状态,其展开的宽度收放均由笔杆下按时,以笔杆最前端为圆心坐标点,尾端则作笔锋平行排序的90°平面方向在坐标点的两侧做在0到15°之间弧型摆动来实现。
进一步,笔锋在摆动中下按,即锋毛平行展开;笔锋在摆动中提升,则锋毛收起。
进一步,笔锋在向平行展开方向前后移动中需要90°或近90°改变移动方向时,横向移动时笔杆前端则与笔锋方向相反,要改变90°方向,控制笔杆的前端向笔锋的45°左上方抬笔至笔头高度使笔毛直立后向左上45°移动笔头長度的距离,笔杆尾部则向相反方向移动笔头二倍的距离,再笔杆前端向相反方向微提至笔头高度,过程中笔杆尾部则与前端相反方向移动与前端呈垂直状,笔锋已完成至舒張的竖立状态。
进一步,将笔杆前部朝下方向逆顶,三个带胶磁铁带动笔杆尾部则以0到15°反向运动;即笔锋与笔杆尾部同向,但笔移动方向则相反;此时已完成笔锋90°变向并仍保持着平行排序的可移动状态。完成整理笔毛过程中书写动作连续不断。
本发明的有益效果:人工智能机械臂连接本装置,能模拟人手三指执笔的仿生书写创作,并且能使用传统毛笔在不间断的书写中笔锋移动书写时始终保持在笔毛自身弹性范围内,峰毛以平行排序的状态进行工作。实现长时间,准确,不间断,等人所不能及的有效整理笔毛连续书写的工作效率。
附图说明
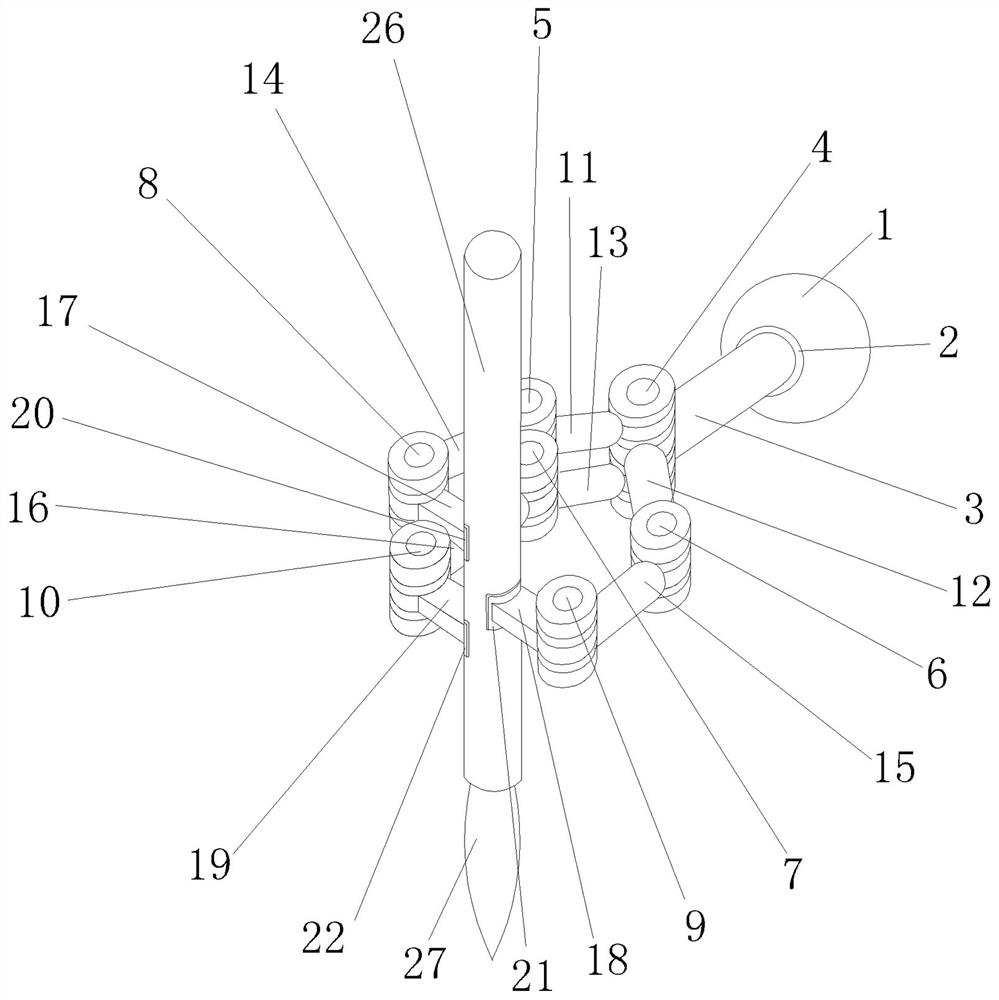
图1为本发明结构示意图。
图2是带胶磁铁,磁吸金属体的放大示意图。
图3是笔尖垂直触及平面触点示意图。
图4是笔尖垂直下按锋毛呈平行叠加的示意图。
图5为图4俯视图。
图6是笔尖锋毛呈平行叠加时控杆在摆动中收放的示意图。
图7为笔锋左朝右横向运笔俯视图。
图8是笔锋90°转向时笔杆向45°移动的示意图。
图9是笔锋完成竖立状态示意图。
图10 是笔锋完成90°变向运行并保持平行排序示意图。
图中:1-执行末端连接体,2-软性接圈,3-总连杆,4-总轴承柱,5-中上轴承柱,6-中中轴承柱,7-下中轴承柱,8-上前轴承柱,9-中前轴承柱,10-下前轴承柱,11-上中连杆,12-中中连杆,13-下中连杆,14-上前连杆,15-中前连杆,16-下前连杆,17-上磁吸金属体,18-中磁吸金属体,19-下磁吸金属体,20-上带胶磁铁,21-中带胶磁铁,22-下带胶磁铁,23-上不干胶层,24-中不干胶层,25-下不干胶层,26-毛笔杆。
具体实施方式
参照图1,图2,一种三点控制笔杆整理笔毛连续书写的装置,包括:连接机械臂的执行末端连接体1,执行末端连接体1通过软性接圈2连接总连杆3,总连杆3另一端连接总轴承柱4,总轴承柱4自上而下转动连接上中连杆11,中中连杆12,下中连杆13,所述上中连杆11,中中连杆12,下中连杆13分别可转动连接中上轴承柱5,中中轴承柱6,下中轴承柱7,所述中上轴承柱5,中中轴承柱6,下中轴承柱7通过上前连杆14,中前连杆15,下前连杆16可转动连接上前轴承柱8,中前轴承柱9,下前轴承柱10,所述上前轴承柱8,中前轴承柱9,下前轴承柱10设有上磁吸金属体17,中磁吸金属体18,下磁吸金属体19,所述上磁吸金属体17,中磁吸金属体18,下磁吸金属体19端部设有上带胶磁铁20,中带胶磁铁21,下带胶磁铁22,所述上带胶磁铁20,中带胶磁铁21,下带胶磁铁22通过可替换型上不干胶层23,中不干胶层24,下不干胶层25,连接毛笔杆26。
使用时选择适配的毛笔,并选定合适实际要求的定位高度,通过上带胶磁铁20,中带胶磁铁21,下带胶磁铁22与上磁吸金属体17,中磁吸金属体18,下磁吸金属体19磁吸固定。
所述装置的整理笔毛书写方法,在去胶可展开书写的笔毛头部含有液体的状态下,毛笔头部呈笔尖垂直触及平面触体点A为启动坐标点,如图3。
以笔头笔毛10%至40%的高度h为笔杆下压限制高度,这也是笔锋毛有效自然弹性的相对极限高度。实际操作可根据不同毛笔的毛种的差别,减小笔杆与笔尖的角度来借助笔毛的弹性。书写启动为,三个带胶磁铁带动笔杆同时垂直下按至笔毛纵向笔尖二侧成稍叠加的平行排序的状态,如图4和图5。
对笔锋平行排序状的收放步骤如下,当三个带胶磁铁带动笔杆下按笔锋即实施叠加状平行展开,其展开宽度收放均由笔杆下按时,以笔杆最前端为圆心坐标点,尾端则作笔锋平行排序的90°平面方向在坐标点的二侧做在0到15°之间弧型摆动来实现,如图6。在摆动中下按,即实施锋毛平行展开;在摆动中提升,则实施锋芒收起。
此时笔锋在向平行展开方向前后移动中需要90°或近90°改变移动方向时,以横向移动为例:注意此时笔杆尾部与笔锋是同一方向,笔杆前端则与笔锋方向相反,如图7;要改变90°方向,将控制笔杆的前端向笔锋的45°左上方抬笔至笔头高度使笔毛直立后向左上45°移动笔头長度的距离,笔杆尾部则向相反方向移动笔头二倍的距离,如图8;再笔杆前端向相反方向微提至笔头高度,过程中笔杆尾部则与前端相反方向移动与前端呈垂直状,笔锋已完成至舒張的竖立状态,如图9。
再在此基础上,将笔杆前部朝正下方向逆顶。三个带胶磁铁带动笔杆尾部则以0到15°反向运动。与笔尖成同方向,毛笔书写移动则向下,此时已完成笔锋90°变向并仍保持着平行排序的状态。如图10。
此逆顶动作,同时也可在此时向下移动的左右方向连续摇摆笔杆前端0到10°来控制笔锋毛尖平行展开的宽度。
本发明控制笔杆实施毛笔笔锋在移动中保持弹性范围内的平行排序,收放,转向与移动,是在连续不断的状态下完成的。
虽然已结合一些具体的实施案例描述本发明的原理,但应当明确了解,这只是通过部分实例做出这些描述,它们不用来限制本发明的范围。