抑制风力涡轮机的塔架的向前和向后运动的装置和方法
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种抑制风力涡轮机的塔架的向前和向后运动的装置和方法。
背景技术
主动塔架阻尼通过应用适当的桨距角变化来减少塔架振荡。桨距角是关于每个叶片的纵向轴线测得的角度。桨距角的适当变化改变了叶片的空气动力学性质,使得能够抑制塔架振荡。这减小了塔架和塔架基部的弯曲负荷。然而,因为除了普通的变桨操作之外还需要附加的变桨以便抑制塔架振荡,所以变桨活动(pitch activity)和变桨轴承(pitchbearing)损坏将增加。如果变桨系统容量和/或变桨轴承容量对于某些风力涡轮机设计而言是问题,特别是对于大且重的叶片或其他约束而言,则变桨系统可能难以实现塔架阻尼。
EP 1 320 680 A1公开了安装到风力涡轮机转子的叶片的襟翼。这些襟翼改变空气流以调节转子的旋转速度。
发明内容
可能需要一种抑制风力涡轮机的塔架的向前和向后运动的装置和方法,所述装置和方法将转子和叶片约束条件考虑在内。这种需求可由根据独立权利要求的主题满足。本发明也如从属权利要求中所阐述的那样进一步发展。
根据本发明的第一方面,提供了一种抑制风力涡轮机的塔架的向前和向后运动的方法,其中,风力涡轮机包括塔架和转子,转子安装在塔架的顶部处以绕其中发生塔架的向前和向后运动的旋转轴线旋转,并且该转子具有多个叶片,其中,每个叶片具有至少一个对应的主动附加构件,该主动附加构件由对应的致动器致动以更改叶片的空气动力学性质。每个附加构件由对应的致动器致动以更改叶片的空气动力学性质,使得转子被构造成抑制风力涡轮机的塔架的向前和向后运动。
有利地,变桨系统基本上不必然参与抑制,使得变桨系统或叶片的约束条件对于本创造性方法而言不再是相关的。主动附加构件能够减少结构负荷(主要是塔架负荷和地基(foundation)负荷),并且变桨系统(例如,液压装置)不受应力。因此能够避免变桨轴承损坏。
附加构件在被激活时将降低转子的推力(类似于在传统设置中使叶片朝向顺桨变桨将降低推力)。因此,如果在塔架将向后移动时激活附加构件,则能够减小推力,并且塔架将不向后摇摆那么多,这将减少振荡。类似地,当塔架将被向前推动时,能够激活附加构件以增加推力从而对抗塔架振荡的运动。
优选地,该方法包括以下步骤:a)测量时间信号,该时间信号表示塔架或机舱的向前和向后加速度、速度或位置;b)对时间信号进行滤波,以提取至少一个频率分量;以及c)基于至少一个提取的频率分量来为每个致动器生成致动信号并将致动信号供应到致动器以致动对应的附加构件。
优选地,步骤b)能够进一步包括以下子步骤中的至少一者:针对至少一个滤波后的频率分量补偿时间信号的相位;以及应用增益来为每个致动器获得单独的致动信号以作用在至少一个频率分量上。
主动塔架阻尼功能通过将偏移应用于主动附加构件来减小由向前和向后运动造成的塔架基部上的负荷。送至致动器的阻尼信号能够是塔架加速度信号的函数。阻尼信号包含主导塔架运动的频率组成(content)(第一塔架本征模式)。
阻尼信号在第一塔架本征模式下能够具有最佳相位,使得主动附加构件将应用推力变化,该推力变化将抑制塔架振荡。例如,当旋转叶片经过塔架时,触发塔架振荡。由此,该叶片和塔架之间的空气压力突然改变,使得触发塔架振荡。因为确定了塔架振荡的相位,所以每个叶片的致动器以正确的正时被致动。
附加构件的偏移(因为这将被加到主动附加构件的已有的控制器输出)能够基于塔架(或机舱)的测得的向前和向后加速度来计算,并在以下步骤中进行:1)测量机舱或塔架顶部的向前和向后加速度,2)对加速度信号进行滤波以确保a)通过(一个或多个)相关频率分量,否则对其进行抑制;b)将主导运动下的相位(第一塔架本征频率)考虑在内,以确保通过相应的附加构件来正确地抑制塔架振荡。
更优选的是,应用增益的步骤包括将激活信号限制在上界和/或下界内的子步骤。由此,能够使致动信号饱和以确保偏移在期望范围内,所述期望范围遵守附加构件的容量和期望的使用范围。
更优选的是,使用低通滤波器和带通滤波器中的至少一者来执行步骤b)。低通滤波器能够起作用以改变信号的相位(经调谐以在塔架频率下对其进行充分调整),而带通滤波器能够仅通过第一塔架本征频率(即,主导运动)。
更优选的是,使用测得的加速度和转子推力变化之间的传递函数来执行补偿时间信号的相位的步骤,以补偿可能的通信延迟、致动器动力学和空气动力学。获得正确的相位能够取决于测得的加速度和转子推力变化之间的传递函数,包括可能的通信延迟、致动器动力学、致动器延迟、传感器延迟、系统延迟、空气动力学等。
更优选的是,在应用增益的步骤中的增益具有固定值。应用增益以将加速度信号转换为主动附加构件的适当激活。替代地,在应用增益的步骤中的增益具有可变值,这些可变值是基于对应的主动附加构件在某操作点处的灵敏度来确定的,和/或仅在所选的操作点处应用阻尼。能够通过相关操作参数对增益进行安排以包括主动附加件在某操作点处的灵敏度,或者能够对增益进行安排以仅在所选的操作点处应用阻尼,例如,如果对于一些操作点而言不期望致动器的附加激活,则仅在某些操作区域中应用阻尼。
优选地,每个叶片均可运动以更改其桨距角;并且由对应的致动器基于致动信号使每个叶片的主动附加构件运动,而该叶片的桨距角保持不变。由此,变桨系统完全不受应力。
优选地,每个叶片均可运动以更改其桨距角;并且由对应的致动器基于致动信号使每个叶片的主动附加构件运动,所述致动信号将该叶片的桨距角考虑在内。由此,变桨系统不必关闭,而是通过附加构件的抑制操作使其不受应力。
优选地,每个叶片均可运动以更改其桨距角;并且通过将对应的致动器的致动信号考虑在内来确定桨距角。例如,在低塔架频率或浮基(也具有低频率)下,在系统频率如此低以至于其将干扰速度/变桨控制器的情况下,附加构件的激活可能具有相反的影响,因为所得的桨距角将以相反的符号来改变推力。然而,该实施例将桨距角和附加构件激活相结合,其中功率和速度将相同,但是转子推力将变化。
根据本发明的第二方面,提供了一种用于抑制风力涡轮机的塔架的向前和向后运动的装置,其中,风力涡轮机包括塔架和转子,该转子安装在塔架的顶部处以绕其中发生塔架的向前和向后运动的旋转轴线旋转,并且该转子具有多个叶片,其中,每个叶片具有至少一个对应的主动附加构件,该主动附加构件由对应的致动器致动以更改叶片的空气动力学性质。每个附加构件由对应的致动器致动以更改叶片的空气动力学性质,使得转子被构造成抑制风力涡轮机的塔架的向前和向后运动。
优选地,装置进一步包括:测量装置,其被构造成测量时间信号,该时间信号表示塔架或机舱的向前和向后加速度、速度或位置;滤波装置,其被构造成对时间信号进行滤波以提取至少一个频率分量;以及生成和供应装置,其被构造成基于至少一个提取的频率分量来为每个致动器生成致动信号并将致动信号供应到致动器以致动对应的附加构件。
优选地,滤波装置进一步包括以下各者中的至少一者:补偿装置,其被构造成针对至少一个滤波后的频率分量补偿时间信号的相位;以及应用装置,其被构造成应用增益来为每个致动器获得单独的致动信号以作用在至少一个频率分量上。
更优选的是,应用装置被构造成将激活信号限制在上界和/或下界内。
更优选的是,滤波装置包括低通滤波器和带通滤波器中的至少一者。
更优选的是,确定装置被构造成使用测得的加速度和转子推力变化之间的传递函数来补偿可能的通信延迟、致动器动力学、致动器延迟、传感器延迟、系统延迟和空气动力学。
更优选的是,增益具有固定值。替代地,增益具有可变值,这些可变值基于对应的主动附加构件在某操作点处的灵敏度确定,和/或仅在所选的操作点处应用阻尼。
优选地,每个叶片均可运动以更改其桨距角;并且由对应的致动器基于致动信号使每个叶片的主动附加构件运动,而该叶片的桨距角保持不变。
优选地,每个叶片均可运动以更改其桨距角;并且由对应的致动器基于致动信号使每个叶片的主动附加构件运动,所述致动信号将该叶片的桨距角考虑在内。
优选地,每个叶片均可运动以更改其桨距角;并且通过将对应的致动器的致动信号考虑在内来确定桨距角。
必须注意,已参考不同的主题描述了本发明的实施例。具体地,已参考设备类型权利要求描述了一些实施例,而已参考方法类型权利要求描述了其他实施例。然而,本领域技术人员将从上文以及后续描述中获悉,除非另有其它通知,否则除了属于一种类型的主题的特征的任何组合之外,与不同主题有关的特征之间(特别是设备类型权利要求的特征和方法类型权利要求的特征之间)的任何组合也被认为是与本申请一起被公开。
附图说明
本发明的上文限定的方面以及另外的方面从下文中将描述的实施例的示例显而易见,并且参考实施例的示例来进行解释。在下文中将参考实施例的示例来更详细地描述本发明,但是本发明并不限于实施例的示例。
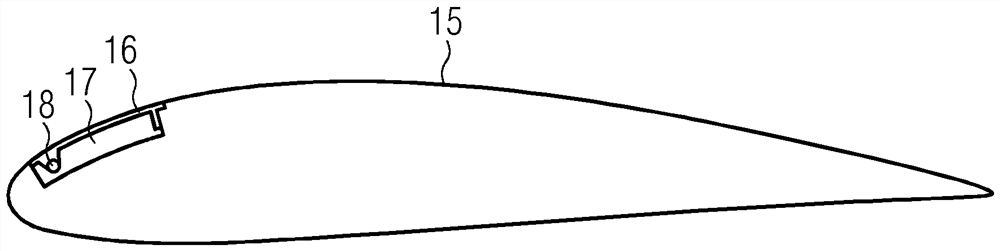
图1示出了具有附加构件的风力涡轮机叶片;
图2示出了处于激活位置中的该附加构件,其中该附加构件被转动到最大失速效果;
图3示出了根据第一实施例的抑制风力涡轮机的塔架的向前和向后运动的方法的实施方式;
图4示出了桨距和配平(trim)失速激活之间的关系;
图5示出了推力系数(Ct)和配平失速激活之间的关系,其中桨距角将根据图4变化;
图6示出了根据第二实施例的抑制风力涡轮机的塔架的向前和向后运动的方法的实施方式;以及
图7示出了根据第三实施例的抑制风力涡轮机的塔架的向前和向后运动的方法的实施方式。
具体实施方式
附图中的图示是示意性的。注意,在不同图中,类似或相同的元件设有相同的附图标记。
图1示出了风力涡轮机(未示出)的风力涡轮机叶片15。风力涡轮机包括塔架和转子,其中,该转子安装在塔架的顶部处以绕旋转轴线旋转。更详细地,转子安装到毂,毂相应地安装到机舱。机舱安装到塔架。转子具有多个叶片15。每个叶片15均具有主动附加构件17,该主动附加构件17由致动器致动以更改叶片15的空气动力学性质。
经由叶片15,转子将推力施加到塔架,使得发生塔架和塔架的机舱的向前和向后运动。
每个附加构件17均由对应的致动器致动以更改叶片15的空气动力学性质,使得转子被构造成抑制风力涡轮机的塔架的向前和向后运动。即,通过改变叶片15的空气动力学性质,适当地改变了从转子到塔架的推力以抵消塔架的向前和向后运动。
附加构件17被设计为扰流板(spoiler)。扰流板17在此布置在叶片15的前边缘附近,但是也能够布置在叶片15的后边缘附近。附加构件17被容纳在叶片15中的凹部16中,并且能够通过致动器的激活围绕铰链18转动。在图1中,扰流板17被示为处于其正常停用位置中,在该停用位置中,不期望扰流板效果以及失速。
图2示出处于激活位置中的该附加构件17,在该激活位置中,附加构件17通过致动器被最大程度地转动,使得失速效果最大。
根据本发明,附加构件17不一定形成为扰流板。附加构件17能够具有能够更改叶片15的空气动力学性质的任何其他构型。
图3示出了根据第一实施例的抑制风力涡轮机的塔架的向前和向后运动的方法的实施方式。
附图标记1标示转子速度参考;附图标记2标示速度配平失速控制器;附图标记3标示配平失速系统;附图标记4标示转子速度;附图标记5标示配平失速参考;附图标记6标示配平失速变桨控制器;附图标记7标示变桨系统;附图标记8标示塔架加速度;并且附图标记9标示塔架配平失速控制器。
测量塔架的向前和向后加速度以获得塔架加速度8。塔架加速度8被输入塔架配平失速控制器9中。替代地,能够测量塔架的向前和向后速度或甚至塔架沿向前和向后方向的位置而不是加速度。
在塔架配平失速控制器9中,对时间信号进行滤波以提取至少一个频率分量。能够通过使用低通滤波器和带通滤波器中的至少一者来执行滤波。由带通滤波器且然后可选地由低通滤波器实现滤波,以补偿相位并作为次要目标来进一步衰减噪声。可选地,能够进一步提供时间延迟和/或超前-滞后滤波器。所使用的滤波器对时间序列(例如,针对测得的塔架或机舱加速度信号)起作用,并被设计成具有旨在输出特定频率(塔架模式)使得其具有高振幅(水平)和正确相位(时间超前/滞后)以实现抑制目的的特性。
由此,能够补偿用于至少一个滤波后的频率分量的时间信号的相位。为了补偿可能的通信延迟、致动器动力学、致动器延迟、传感器延迟、系统延迟和空气动力学等,能够通过使用测得的加速度和转子推力变化之间的传递函数来补偿相位。
此后,应用增益来为每个致动器获得单独的致动信号以作用在至少一个频率分量上。然后,各个致动信号被供应到每个叶片15的附加构件17的致动器。能够确定增益,使得激活信号被限制在上界和/或下界内。增益被应用于时间信号,因此原则上其将被应用于信号中存在的所有频率。然而,滤波器通常被设定成使得信号中将主要存在塔架频率。
增益能够具有固定值或可变值中的任一者。能够基于主动附加构件17在某操作点处的灵敏度来确定可变值。可变值能够仅在所选的操作点处应用阻尼。
将因此生成的致动信号从配平失速控制器9供应到配平失速系统3。配平失速系统3包括每个叶片15的主动附加构件17和致动器。基于所供应的相关联的致动信号来操作每个致动器,使得主动附加构件17由致动器致动以更改对应的叶片15的空气动力学性质。
在第一实施例中,转子速度参考1和转子速度4之间的差被输入速度配平失速控制器2中。速度配平失速控制器2的输出与从如上文所描述的配平失速控制器9输出的致动信号一起被输入配平失速系统3中。因此,每个叶片15的附加构件17的致动器也将转子速度考虑在内。
进一步地,来自速度配平失速控制器2的输出和配平失速参考5之间的差被输入配平失速变桨控制器6中。配平失速变桨控制器6的输出被输入变桨系统7中。变桨系统7包括变桨致动器以改变对应的叶片15的桨距角。桨距角是叶片15的关于叶片15的纵向轴线测得的角度。
在本发明中,优选地由单独的配平失速系统3来排他地抑制风力涡轮机的塔架的向前和向后运动,其中,本文不涉及变桨系统7。这在使用大且重的叶片15的情况下是特别有利的,因为变桨系统7主要关注变桨,且不因作为附加任务的配平失速工作而工作过度(over-strained)。结果,能够避免变桨活动和变桨轴承损坏。
图4示出桨距和配平失速激活之间的关系,且图5示出了推力系数(Ct)和配平失速激活之间的关系,其中桨距角将根据图4变化。
对于极低塔架频率或浮基(也具有低频率),在系统频率如此低以至于其将干扰速度和变桨控制器的情况下,配平失速系统3的激活将具有相反的影响,因为所得的桨距角将以相反的符号来改变推力。
因此,应利用的是,存在桨距角激活和配平失速激活的组合,其中功率和速度将相同,但转子推力将变化。
图6示出了根据第二实施例的抑制风力涡轮机的塔架的向前和向后运动的方法的对应的实施方式,该第二实施例适合于这些极低塔架频率或浮基。图3的第一实施例的相同元件由相同的附图标记标示。在第二实施例中,通常作为塔架/机舱加速度的函数来计算配平失速参考和变桨参考。
更详细地,测量塔架的向前和向后加速度以获得塔架加速度8。塔架加速度8被输入塔架配平失速控制器9中。
在塔架配平失速控制器9中,对来自测得的加速度的至少一个频率分量进行滤波,并且确定至少一个滤波后的频率分量的相位。此后,增益被应用于具有所确定的相位的至少一个滤波后的频率分量上,来为每个附加构件17获得致动信号。
将致动信号从配平失速控制器9供应到配平失速系统3。
在第二实施例中,转子速度参考1和转子速度4之间的差被输入速度配平失速控制器2中。速度配平失速控制器2的输出与从如上文所描述的配平失速控制器9输出的致动信号一起被输入配平失速系统3中。因此,每个叶片15的附加构件17的致动器也将转子速度考虑在内。
配平失速系统3包括每个叶片15的主动附加构件17和致动器。基于所供应的致动信号来操作每个致动器,使得主动附加构件17由致动器致动以更改对应的叶片15的空气动力学性质。
进一步地,来自速度配平失速控制器2的输出和配平失速参考5之间的差被输入配平失速变桨控制器6中。配平失速变桨控制器6的输出被输入变桨系统7中。变桨系统7包括变桨致动器以改变对应的叶片15的桨距角。桨距角是叶片15的关于该叶片的纵向轴线测得的角度。
在第二实施例中,测得的塔架加速度8被附加地输入塔架变桨控制器10中。塔架变桨控制器10的输出与上文所描述的配平失速变桨控制器6的输出一起被输入变桨系统7中。
在第二实施例中,塔架加速度8被考虑到变桨参考中,使得变桨系统7辅助抑制塔架的向前和向后运动。
图7示出了根据第三实施例的抑制风力涡轮机的塔架的向前和向后运动的方法的实施方式。图6的第二实施例的相同元件由相同的附图标记标示。第三实施例是第二实施例的替代方案。在第三实施例中,作为阻尼的变桨部分的函数来计算阻尼的配平失速部分。
测量塔架的向前和向后加速度以获得塔架加速度8。塔架加速度8被输入塔架变桨控制器10中。塔架变桨控制器10的输出被输入塔架配平失速控制器9中。
在塔架配平失速控制器9中,对来自测得的加速度的至少一个频率分量进行滤波,并且确定至少一个滤波后的频率分量的相位。此后,增益被应用于具有所确定的相位的至少一个滤波后的频率分量上,以获得致动信号。在第三实施例中,考虑到塔架变桨控制器10的输出来执行滤波过程和/或增益的应用。
将致动信号从配平失速控制器9供应到配平失速系统3。配平失速系统3包括每个叶片15的主动附加构件17和致动器。基于所供应的致动信号来操作每个致动器,使得主动附加构件17由致动器致动以更改对应的叶片15的空气动力学性质。
在第三实施例中,转子速度参考1和转子速度4之间的差被输入速度配平失速控制器2中。速度配平失速控制器2的输出与从如上文所描述的配平失速控制器9输出的致动信号一起被输入配平失速系统3中。因此,每个叶片15的附加构件17的致动器也将转子速度考虑在内。
进一步地,来自速度配平失速控制器2的输出和配平失速参考5之间的差被输入配平失速变桨控制器6中。配平失速变桨控制器6的输出被输入变桨系统7中。变桨系统7包括变桨致动器以改变对应的叶片15的桨距角。桨距角是叶片15的关于叶片15的纵向轴线测得的角度。
塔架变桨控制器10的输出与如上文所描述的配平失速变桨控制器6的输出一起被输入变桨系统7中。
在第三实施例中,还基于变桨控制来确定配平失速参考。
应注意,术语“包括”不排除其他元件或步骤,并且“一”或“一个”不排除多个。而且,可结合关于不同实施例描述的元件。还应注意,权利要求中的附图标记不应被理解为限制权利要求的范围。