内窥镜
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及一种内窥镜,该内窥镜具有能够通过倾斜使设置于插入部的弯曲部在上下左右方向中的任意方向或上下左右方向中的2个方向的复合方向上选择性地且主动地弯曲的杆。
背景技术
近年来,内窥镜在医疗领域被广泛利用。在医疗领域中使用的内窥镜通过将细长的插入部插入到成为被检体的体腔内,能够观察体腔内的被检部位。
另外,公知有在内窥镜的插入部的前端侧设置有弯曲部的结构,所述弯曲部在上下左右方向中的任意方向或上下左右方向中的2个方向的复合方向上主动且选择性地自如弯曲。
弯曲部除了随着弯曲而提高被检体内的弯曲部中的插入部的行进性之外,在插入部中,使设置于前端部的观察光学系统的观察方向可变,所述前端部比弯曲部靠插入部的长轴方向的前端侧。
若列举一例,则在内窥镜的插入部内以及与该插入部的长轴方向的基端连接设置的内窥镜的操作部内,插通有长轴方向的前端分别固定于弯曲部的2对、即4根弯曲操作线。
4根弯曲操作线中的任一根或4根弯曲操作线中的任意2根由设置于内窥镜的操作部中的弯曲操作装置来牵引。
由此,弯曲部在上下左右4个方向中的任意方向或上下左右方向中的2个方向的复合方向上主动且选择性地自如弯曲。
另外,牵引弯曲操作线的弯曲操作装置的结构是公知的。例如,国际公开WO2018/029916号公报中公开了在弯曲操作装置中使用已知的操纵杆(Joystick)装置的内窥镜的结构。
操纵杆装置通过伴随杆的倾斜操作而利用弯曲操作机构来牵引弯曲操作线,使弯曲部主动且选择性地弯曲。
具体而言,在专利文献1所公开的内窥镜中,操纵杆装置的杆构成为,通过设置于倾斜支点的第一转动轴,在与弯曲部的弯曲方向的上方向对应的第一方向或与弯曲方向的下方向对应的第二方向上选择性地自如地倾斜。由此,弯曲部具有在上下方向上选择性地自如弯曲的结构。
另外,杆构成为,通过设置于倾斜支点的第二转动轴,在与弯曲部的弯曲方向的左方向对应的第三方向或与弯曲方向的右方向对应的第四方向上选择性地自如地倾斜。由此,弯曲部具有在左右方向上选择性地自如弯曲的结构。
并且,杆构成为,通过第一转动轴以及第二转动轴,在作为所述第一方向与所述第三方向的复合方向的第五方向、作为所述第二方向与所述第四方向的复合方向的第六方向、作为所述第一方向与所述第四方向的复合方向的第七方向、以及作为所述第二方向与所述第三方向的复合方向的第八方向上选择性地自如地倾斜。由此,弯曲部在上下左右方向中的2个方向的复合方向上选择性地自如弯曲。
在此,如上所述,杆具有在多个方向上自如地倾斜的结构。另外,一般利用操作者的拇指对杆进行倾斜操作。另外,由操作者的拇指进行的杆的倾斜操作大多描绘出接近圆运动的轨迹。
因此,例如在欲使杆向第一方向或第二方向倾斜的情况下,有可能伴随着圆周运动而意外地向第三方向~第八方向倾斜,存在使弯曲部向与操作者所希望的弯曲方向不同的方向弯曲的情况。具体而言,存在使弯曲部向与上下方向不同的方向弯曲的情况。
在该情况下,操作者需要对弯曲方向进行微调整,除了复杂以外,还存在各种观察和检查时间变长的问题。
另外,在医疗领域中的实际的各种观察、检查中,作为弯曲部的弯曲操作,向上下方向弯曲的情况与向左右方向或上下左右方向中的2个复合方向弯曲的情况相比占压倒性多数。因此,期望能够在杆频繁地倾斜的第一方向或第二方向上无误操作地可靠地倾斜的结构。
本发明是鉴于上述问题点以及情况而完成的,其目的在于提供一种内窥镜,在使对弯曲部进行弯曲操作的杆向第一方向或者第二方向倾斜时,能够容许杆向第三方向或者第四方向或者复合方向的意外的倾斜操作。
发明内容
用于解决课题的手段
为了实现上述目的,本发明的一个方式的内窥镜具备:插入部,其具有能够主动地弯曲的弯曲部;杆,其能够牵引弯曲操作线,为了使所述弯曲部选择性地向上下左右方向中的任意方向或所述上下左右方向中的2个方向的复合方向弯曲,所述杆能够选择性地向与上方向对应的第一方向、与下方向对应的第二方向、与左方向对应的第三方向、与右方向对应的第四方向中的任意方向或者所述第一方向~所述第四方向中的2个方向的复合方向倾斜,通过倾斜使所述弯曲部弯曲;以及弯曲操作机构,其具有游隙部分,在使所述杆向所述第三方向或所述第四方向或者所述复合方向倾斜时,在达到规定的倾斜量之前,所述游隙部分维持所述弯曲部向所述左方向或所述右方向或者所述复合方向的非弯曲状态。
附图说明
图1是表示第一实施方式的内窥镜的平面图。
图2是从图1中的II方向观察图1的内窥镜中的操作部的操作部主体及通用缆线的一部分的侧视图。
图3是表示设置在图1的操作部内的弯曲操作装置的放大立体图。
图4是除了壳体、支撑件、吸引缸之外,从图3中的IV方向观察图3的弯曲操作装置的立体图。
图5是从图3的弯曲操作装置中除去支撑件、吸引缸、弯曲操作线而示出的弯曲操作装置的分解立体图。
图6是概略地表示沿着图3中的VI-VI线的弯曲操作装置的截面的图。
图7是从图6中的VII方向概略地观察图6的弯曲操作装置中的壳体、转动框、杆的侧视图。
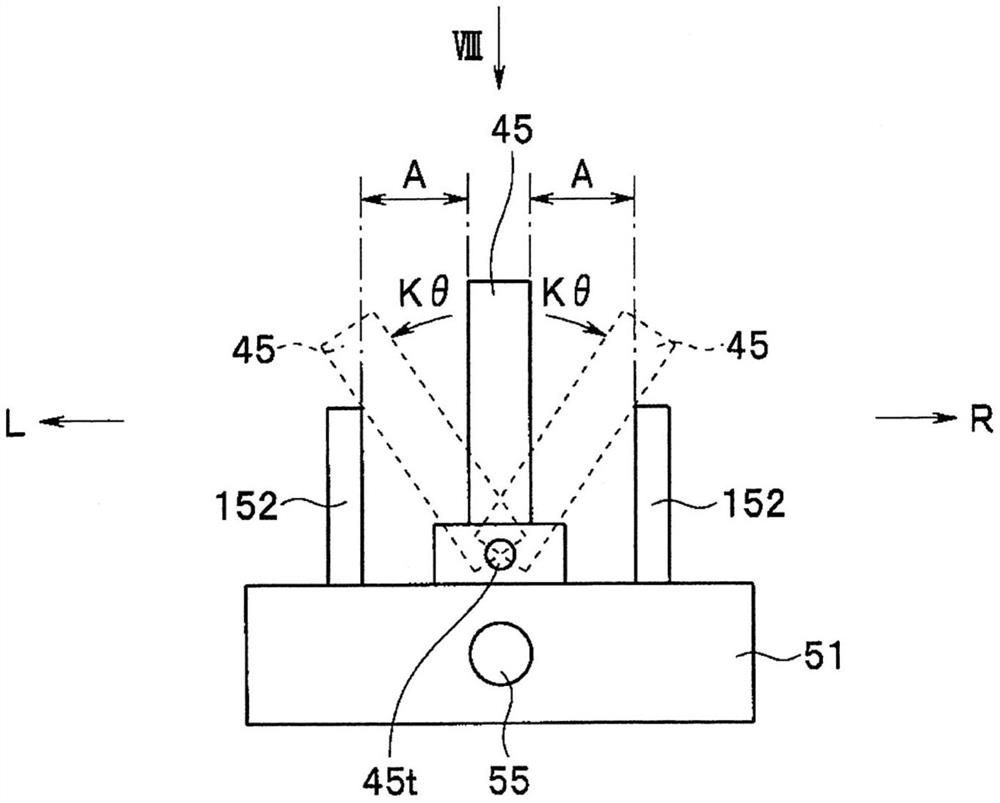
图8是从图7中的VIII方向观察图7的转动框的止动件以及杆的俯视图。
图9是表示图8的止动件的变形例的形状的侧视图。
图10是表示与图9不同的图8的止动件的变形例的形状的侧视图。
图11是概略地表示杆与图9的止动件的抵接角度的图。
图12是表示具有与图9的结构相同的效果的止动件的变形例的形状的俯视图。
图13是表示具有与图11的结构相同的效果的止动件的变形例的形状的俯视图。
图14是概略地表示第二实施方式的内窥镜中的弯曲操作装置的截面的图。
具体实施方式
以下,参照附图说明本发明的实施方式。
(第一实施方式)
图1是表示本实施方式的内窥镜的平面图,图2是从图1中的II方向观察图1的内窥镜中的操作部的操作部主体及通用缆线的一部分的侧视图。
另外,图3是表示设置在图1的操作部内的弯曲操作装置的放大立体图,图4是除了壳体、支撑件、吸引缸之外,从图3中的IV方向观察图3的弯曲操作装置的立体图,图5是从图3的弯曲操作装置中除去支撑件、吸引缸、弯曲操作线而示出的弯曲操作装置的分解立体图。
如图1所示,内窥镜1具备沿长轴方向N细长的插入部2和与该插入部2的长轴方向N的基端侧连接设置的操作部3。另外,内窥镜1例如由已知的尿管镜结构。
插入部2由具有挠性的管状部件构成,通过从长轴方向N的前端侧开始依次连续设置前端部6、能够主动弯曲的弯曲部7、挠性管部8而构成。
在前端部6内设置有对被检体内进行观察和拍摄的摄像单元、向被检体内供给照明光的照明单元(均未图示)等。
另外,在前端部6的前端面形成有处置器具插通通道的前端开口(均未图示),所述处置器具插通通道至少设置于插入部2及操作部3内,并且在对被检体内插拔处置器具、除此之外吸引被检体内的流体时使用。
弯曲部7在内部具备沿长轴方向N连结的多个弯曲块。另外,弯曲部7在多个弯曲块中的位于长轴方向N的最前端侧的弯曲块上,以在弯曲块的周向上分别错开90°的状态连接有后述的4根弯曲操作线(以下,简称为线)23(参照图3)的长轴方向N的前端。
因此,通过由后述的弯曲操作装置50(参照图3)选择性地牵引4根线23中的任一根线或4根线23中的任意2根线,使弯曲部7在上下左右方向中的任意方向、或上下左右方向中的2个方向的复合方向上选择性地且主动地弯曲。
另外,在本实施方式中,弯曲部7弯曲的上下左右方向是与由设置于前端部6内的摄像单元拍摄的观察图像的上下左右方向对应地定义的方向。
挠性管部8由能够被动地弯曲的具有挠性的管状部件构成。在挠性管部8的内部插通有上述的各线23、从均未图示的摄像单元延伸出的信号缆线、向照明单元供给照明光的光导、处置器具插通通道等。
操作部3具备防折部30、把持部31以及操作部主体32而构成主要部。
防折部30以覆盖挠性管部8的长轴方向N的基端的状态与挠性管部8连接。
把持部31是由操作者的手把持的部位,与防折部30的长轴方向N的基端连接设置。
另外,把持部31具有操作者能够通过左手或者右手的任意手把持并进行操作的形状。
并且,在把持部31的长轴方向N的前端侧设置有处置器具插通部35。处置器具插通部35具有与上述的处置器具插通通道连通的处置器具插通口35a,各种处置器具经由处置器具插通口35a对处置器具插通通道插拔。
另外,在处置器具插通口35a拆装自如地设置有用于封堵该处置器具插通口35a的未图示的钳塞。
操作部主体32与把持部31的长轴方向N的基端连接设置。另外,通用缆线4(参照图2)从操作部主体32延伸出,在该通用缆线4的延伸端设置有未图示的内窥镜连接器。
另外,在操作部主体32的一侧面侧设置有用于进行内窥镜1的各种操作的操作按钮组40。
操作按钮组40由吸引按钮41和按钮开关42构成主要部。
吸引按钮41相对于设置于操作部主体32的吸引缸43(参照图3)装卸自如。另外,如图3所示,缸43设置在操作部主体32内。
按钮开关42例如由2个构成,从与内窥镜1相关的各种功能中对各按钮开关42分配任意的功能。
并且,在操作部主体32的另一侧面侧设置有杆45,该杆45具备用于对弯曲部7进行主动的弯曲操作的弯曲操作装置50中的手指抵接部46。另外,在杆45中,也可以在从操作部主体32露出的延伸部位的周围,以使手指抵接部46露出的方式覆盖已知的护罩套。
弯曲操作装置50设置于操作部主体32。另外,如图3~图5所示,弯曲操作装置50具备杆45、弯曲操作机构100、摆动部件53、线牵引部件54、支撑件58、4根线23而构成主要部分。另外,弯曲操作装置50由已知的操纵杆装置构成。
杆45是操纵杆型的操作杆,为了使弯曲部7在上下左右方向中的任意方向或上下左右方向中的2个方向的复合方向上选择性地弯曲,所述杆45能够在与弯曲部7的上方向对应的第一方向U、与弯曲部7的下方向对应的第二方向D、与弯曲部7的左方向对应的第三方向L、与弯曲部7的右方向对应的第四方向R中的任意方向、或者第一方向U~第四方向R中的2个方向的复合方向上,从沿着轴向45j的直立状态选择性地倾斜,且能够通过倾斜来牵引线23。
因此,当使杆45向图2中的第一方向U倾斜时,弯曲部7向上方弯曲,当使杆45向图2中的第二方向D倾斜时,弯曲部7向下方弯曲,当使杆45向图2中的第三方向L倾斜时,弯曲部7向左方向弯曲,当使杆45向图2中的第四方向R倾斜时,弯曲部7向右方向弯曲。
另外,当使杆45向第一方向U与第三方向L的复合方向即第五方向UL倾斜时,弯曲部7向上方向与左方向的复合方向弯曲,当使杆45向第二方向D与第四方向R的复合方向即第六方向DR倾斜时,弯曲部7向下方向与右方向的复合方向弯曲。
进而,当使杆45向第一方向U与第四方向R的复合方向即第七方向UR倾斜时,弯曲部7向上方向与右方向的复合方向弯曲,当使杆45向第二方向D与第三方向L的复合方向即第八方向DL倾斜时,弯曲部7向下方向与左方向的复合方向弯曲。
手指抵接部46是把持把持部31的操作者的拇指O(参照图2)等所放置的部位,设置于沿着轴向45j向操作部主体32外突出的杆45的突出端。
弯曲操作机构100具备壳体51和转动框52。
如图3、图5所示,壳体51形成为大致圆筒形状。另外,在壳体51的中央部形成有开口部51h。
开口部51h用于使杆45沿着轴向45j在壳体51中通过,开口部51h的外侧棱线51e构成倾斜后的杆45所抵接的部位。
即,通过杆45抵接到开口部51h的外侧棱线51e,杆45达到最大倾斜角度。
另外,如图5所示,在壳体51的外周部贯穿设置有彼此相对的轴孔51a。
在各轴孔51a中分别嵌入有构成第二转动轴的销55,所述第二转动轴是使杆45在第三方向L或第四方向R上选择性地倾斜而使弯曲部7向左方向或右方向选择性地弯曲时的倾斜支点。另外,各销55与第一方向U及第二方向D平行地配置。
如图5所示,转动框52例如形成为大致矩形形状,是具有预先确定的形状的贯通孔的框体。
在转动框52的外周部贯穿设置有彼此相对的一对卡定孔52a。另外,在转动框52的外周部,在与一对卡定孔52a在外周方向上错开90°的位置贯穿设置有彼此相对的一对轴孔52b。
在各轴孔52b中分别嵌入有构成第一转动轴的销56,所述第一转动轴是使杆45在第一方向U或第二方向D上选择性地倾斜而使弯曲部7向上方或下方选择性地弯曲时的倾斜支点。另外,各销56与第三方向L及第四方向R平行地配置。
在各卡定孔52a中嵌入分别插通到壳体51的各轴孔51a中的销55。其结果,转动框52相对于壳体51在第三方向L以及第四方向R上转动自如地被轴支承。
如图5所示,摆动部件53形成为大致圆柱形状,在摆动部件53的中央部,嵌合孔53a以使摆动部件53沿着轴向45j贯穿的方式形成。
另外,杆45的基端侧嵌入到嵌合孔53a中,摆动部件53通过粘接、螺合等而一体地连结到杆45。
在摆动部件53的周部形成有彼此相对的一对平坦部53b。另外,在平坦部53b上贯穿设置有彼此相对的卡入孔53c(在图5中仅图示了一个卡入孔53c)。并且,在摆动部件53的沿着轴向45j的端面形成有例如4个螺纹孔53f。
在各卡入孔53c中嵌入分别插通到转动框52的各轴孔52b中的销56。其结果,摆动部件53与杆45一起,以相对于转动框52在第一方向U及第二方向D上转动自如的方式被轴支承。
这样,摆动部件53经由转动框52被支承于壳体51,由此与摆动部件53连结的杆45能够在开口部51h内通过销55、56在第一方向U~第八方向DL中的任意方向上倾斜。
如图5所示,线牵引部件54由板状的部件形成,具有向彼此不同的4个方向延伸的臂部54b。
另外,在本实施方式中,设置于线牵引部件54的彼此相邻的臂部54b的各臂部54b所成的角度分别设定为90度。因此,线牵引部件54由平面形状为十字状的板状部件构成。
线牵引部件54的中心部54a通过螺丝57螺合到螺纹孔53f中,从而固定到摆动部件53。其结果,杆45经由摆动部件53而连结到线牵引部件54。
如图4所示,在各臂部54b的端部侧贯穿设置有线安装孔54c。在各线安装孔54c中分别固定有线23。
因此,当操作者将杆45向所希望的方向进行倾倒操作时,伴随该倾斜操作,线牵引部件54摆动。于是,通过线牵引部件54的摆动,与杆45的倾斜方向对应的线23被牵引,弯曲部7向杆45的倾斜方向弯曲。
具体而言,当操作者将杆45向第一方向U或第二方向D倾倒直至与外侧棱线51e抵接时,借助销56,线牵引部件54经由摆动部件53相对于转动框52在第一方向U或第二方向D上摆动。
其结果,与第一方向U或第二方向D对应的线23被牵引,弯曲部7向上方或下方弯曲。
另外,当操作人员将杆45向第三方向L或第四方向R倾倒直至与外侧棱线51e抵接时,通过销55,转动框52相对于壳体51在第三方向L或第四方向R上摆动,线牵引部件54经由摆动部件53在第三方向L或第四方向R上摆动。
其结果是,与第三方向L或者第四方向R对应的线23被牵引,弯曲部7向左方向或者右方向弯曲。
并且,当操作人员将杆45向第五方向UL或者第六方向DR倾倒直至与外侧棱线51e抵接时,借助销55、56,线牵引部件54经由摆动部件53向第五方向UL或者第六方向DR摆动。
其结果,与第五方向UL或者第六方向DR对应的2根线23被同时牵引,弯曲部7向上方向和左方向的复合方向或者下方向和右方向的复合方向弯曲。
并且,当操作人员将杆45向第七方向UR或第八方向DL倾倒直至与外侧棱线51e抵接时,借助销55、56,线牵引部件54经由摆动部件53向第七方向UR或第八方向DL摆动。
其结果,与第七方向UR或第八方向DL对应的2根线23被同时牵引,弯曲部7向上方向与右方向的复合方向或下方向与左方向的复合方向弯曲。
另外,如图3所示,弯曲操作装置50在操作部主体32内以与缸43相对的方式配置。具体而言,在线牵引部件54的2个臂部54b之间配置有缸43。
而且,如图3所示,在壳体51设置有延伸到缸43侧的支撑件58。在支撑件58上固定有被各线23的外周覆盖的引导件线圈。
在此,弯曲操作机构100具有游隙部分A(参照图7),在使杆45向第三方向L~第八方向DL倾斜时,在达到规定的倾斜量之前,该游隙部分A维持弯曲部7向左方向或右方向或者复合方向的非弯曲状态。
需要说明的是,游隙部分A是指,在弯曲部7与杆45向第三方向L~第八方向DL中的任意方向倾倒的情况下的线牵引部件54的摆动联动地弯曲之前的、杆45向第三方向L~第八方向DL中的任意方向的倾斜范围。
以下,与上述的图2、图5一起,并且使用图6~8来示出具有弯曲操作机构100的游隙部分A的结构。
图6是概略地表示沿着图3中的VI-VI线的弯曲操作装置的截面的图,图7是从图6中的VII方向概略地观察图6的弯曲操作装置中的壳体、转动框、杆的侧视图,图8是从图7中的VIII方向观察图7的转动框的止动件和杆的俯视图。
如图5所示,弯曲操作装置50中的弯曲操作机构100在杆45中,在从成为该杆45的倾斜支点的销55、56沿轴向45j离开的位置处具备第三转动轴45t,所述第三转动轴45t是使杆45向第三方向L或第四方向R选择性地倾倒规定的倾倒量的转动部。
另外,第三转动轴45t与销55同样地,与第一方向U以及第二方向D平行地配置。
另外,第三转动轴45t的转动转矩被设定为比销55的转动转矩小。另外,例如能够通过转动时的滑动摩擦等来设定各转动转矩的设定。
由此,与使用第三转动轴45t的杆45向第三方向以及第四方向R的转动相比,使用销55的转动框52相对于壳体51的向第三方向L以及第四方向R的转动更难以进行。
即,在操作者使用手指抵接部46使杆45向第三方向L~第八方向DL中的任意方向倾斜时,第三转动轴45t先于销55而开始转动。
并且,如图5~图8所示,弯曲操作机构100在转动框52的一部分中构成有一对止动件152,在通过第三转动轴45t的转动而使杆45转动了成为规定的倾斜量的规定角度Kθ时,所述一对止动件152通过与杆45抵接而使第三转动轴45t的转动停止。
另外,止动件152在转动框52中在与第三转动轴45t平行的位置以直线状设置。另外,止动件152也可以设置于与转动框52的第三转动轴45t平行的部位的一部分中。此外,止动件152也可以与转动框52分开设置。
另外,规定角度Kθ例如能够在1°~20°之间任意设定。并且,规定角度Kθ能够根据杆45从止动件152起的在轴向45j上的突出高度而任意地设定。
因此,上述的游隙部分A如图7、图8所示,由直到杆45与止动件152抵接为止的杆45的规定的倾斜量(规定角度Kθ)构成。
根据以上内容,即使杆45向第三方向L~第八方向DL中的任意方向倾斜,在杆45与止动件152抵接之前,仅通过第三转动轴45t使杆45倾斜,因此弯曲部7不会向左方向或右方向或者复合方向弯曲。
另外,在杆45向第五方向UL~第八方向DL倾斜的情况下,在杆45与止动件152抵接之前,在杆45向第五方向UL或者第七方向UR倾斜的情况下,弯曲部7通过销56的转动而开始向上方向弯曲,在杆45向第六方向DR或者第八方向DL倾斜的情况下,弯曲部7通过销56的转动而开始向下方向弯曲。
之后,在杆45与止动件152抵接之后,在维持该抵接状态的状态下,进而当杆45向第三方向L~第八方向DL中的任意方向上倾斜直至与外侧棱线51e抵接时,线牵引部件54摆动,弯曲部7向左方向或右方向或者复合方向中的任意方向弯曲。
另外,其他弯曲操作机构100的结构与以往相同。
这样,在本实施方式中,示出了弯曲操作机构100具有游隙部分A,在使杆45向第三方向L~第八方向DL中的任意方向倾倒时,在达到规定角度Kθ之前,该游隙部分A维持弯曲部7向左方向或右方向或者复合方向的非弯曲状态。
另外,游隙部分A由直到杆45与止动件152抵接为止的杆45的规定的倾倒量(规定角度kθ)构成。
由此,在欲使杆45向使用频率高的第一方向U或第二方向D倾斜的情况下,即使意外地向第三方向L~第八方向DL倾斜,由于杆45在第三方向L及第四方向R上具有游隙部分A,因此在杆45与止动件152抵接之前,弯曲部7不会向上下方向以外的方向弯曲。
另外,即使杆45意外地向与第一方向U接近的第五方向UL或第七方向UR倾斜,在杆45与止动件152抵接之前,弯曲部7也向上方向弯曲,进而,即使杆45意外地向与第二方向D接近的第六方向DR或第八方向DL倾斜,在杆45与止动件152抵接之前,弯曲部7也向下方向弯曲,因此,容易使弯曲部7向上下方向中的任意方向弯曲。
因此,不需要由于使弯曲部7向与上下方向不同的方向弯曲,而再次对弯曲方向向上下方向中的任意方向进行微调整,因此各种观察和检查时间不会变长。
根据以上内容,能够提供具备如下结构的内窥镜1:在使对弯曲部7进行弯曲操作的杆45向第一方向U或第二方向D倾斜时,能够容许对杆45的向第三方向L或第四方向R或者复合方向的意外的倾斜操作。
以下,使用图9~图13来表示变形例。图9是表示图8的止动件的变形例的形状的侧视图,图10是表示与图9不同的图8的止动件的变形例的形状的侧视图,图11是简要地表示杆与图9的止动件的抵接角度的图,图12是表示具有与图9的结构相同的效果的止动件的变形例的形状的俯视图,图13是表示具有与图11的结构相同的效果的止动件的变形例的形状的俯视图。
如上所述,在本实施方式中,止动件152在转动框52中在与第三转动轴45t平行的位置上以直线状设置。
不限于此,止动件152也可以形成为如下的形状:随着沿着第一方向U或第二方向D从杆45远离,直到与止动件152抵接为止的规定角度Kθ发生变化。
具体而言,例如在使杆45向第一方向U或第二方向D倾斜之后,使杆45向第三方向L或第四方向R倾斜时,使用较多的情形是以向第一方向U或第二方向D的倾斜角度小的状态使杆45向第三方向L或第四方向R倾斜,如图9所示,止动件152也可以具有如下的形状:随着从杆45的直立位置152a向第一方向U或第二方向D远离,止动件152的沿着轴向45j的高度朝向各端部152b而变低。
在该情况下,如图11所示,在杆45与止动件152抵接之前,各端部152b侧的杆45的倾斜角度Kθ2比位置152a的杆45的倾斜角度Kθ1大(Kθ2>Kθ1),因此越朝向端部152b侧,杆45越难以碰到止动件152。即,游隙部分A变大。
这是因为手指的动作越朝向比位置152a靠近端部152b侧,向第三方向L或者第四方向R的抖动越大,因此根据这样的结构,能够通过大的游隙部分A吸收该抖动。
相反,例如在使杆45向第一方向U或第二方向D倾斜之后,使杆45向第三方向L或第四方向R倾斜时,使用较多的情形是以向第一方向U或第二方向D的倾斜角度大的状态使杆45向第三方向L或第四方向R倾斜,如图10所示,止动件152也可以具有如下的形状:随着从杆45的直立位置152a向第一方向U或第二方向D远离,止动件152的沿着轴向45j的高度朝向各端部152b而变高。
在该情况下,与图9、图10相反,在止动件45与杆45抵接之前,各端部152b侧的杆45的倾斜角度比位置152a的杆45的倾斜角度小,因此越朝向端部152b侧,杆45越容易碰到止动件152。即,游隙部分A变小。
另外,如图12所示,如果止动件152具有如下的平面形状:随着沿着第一方向U或第二方向D从杆45远离,杆45与止动件152抵接之前的游隙部分A的量变大(A2>A1),则能够得到与图9的止动件152的形状相同的效果。
并且,如图13所示,如果止动件152具有如下的平面形状:随着在第一方向U以及第二方向D上朝向杆45,杆45与止动件152抵接之前的游隙部分A的量变大(A3>A4),能够得到与图10的止动件152的形状同样的效果。
(第二实施方式)
图14是概略地表示本实施方式的内窥镜中的弯曲操作装置的截面的图。
该第二实施方式的内窥镜的结构与上述图1~图8所示的第一实施方式的内窥镜相比,第一转动轴以及第二转动轴的规定方向不同。
因此,仅说明该不同点,对与第一实施方式相同的结构标注相同标号并省略其说明。
如图14所示,在本实施方式中,在弯曲操作装置50中,销56与第五方向UL以及第六方向DR平行地配置,销55与第七方向UR以及第八方向DL平行地配置。
即,杆45通过销56相对于转动框52向第七方向UR或第八方向DL自如地倾斜,进而,转动框52在杆45倾斜后,通过销55相对于壳体51向第五方向UL及第六方向DR自如地倾斜。
进而,杆45通过销55的转动及销56的转动而选择性地向第一方向U~第八方向DL中的任意方向上自如地倾斜。
具体而言,构成为,在将杆45向第一方向U~第四方向R中的任意方向倾斜的情况下,销55及销56双方转动,在将杆45向第五方向UL或第六方向DR倾斜的情况下,销55转动,在将杆45向第七方向UR或第八方向DL倾斜的情况下,销56转动。
另外,第三转动轴45t与第一实施方式同样地,与第一方向U以及第二方向D平行地配置。
即,在本实施方式中,构成维持弯曲部7的非弯曲状态的游隙部分A,通过第三转动轴45t,杆45在与止动件152抵接之前,向第三方向L~第八方向DL中的任意方向自如地倾斜。
另外,在本实施方式中,第三转动轴45t的转动转矩被设定为比销55以及销56的转动转矩小。
具有这样的结构的弯曲操作装置50在内窥镜1例如由气管镜构成的情况下设置在操作部3内。
另外,其他结构与上述第一实施方式相同。
在这样的结构中,弯曲操作机构100具有游隙部分A,在使杆45向第三方向L~第八方向DL中的任意方向倾斜时,在达到规定的角度Kθ之前,所述游隙部分A维持弯曲部7向左方向或者右方向或者复合方向的非弯曲状态,因此能够得到与上述的第一实施方式相同的效果。
另外,即使杆45意外地向与第一方向U接近的第五方向UL或第七方向UR倾斜,在杆45与止动件152抵接之前,弯曲部7向上方向弯曲,进而,即使杆45意外地向与第二方向D接近的第六方向DR或第八方向DL倾斜,在杆45与止动件152抵接之前,弯曲部7向下方向弯曲,因此,也能够得到与第一实施方式相同的容易使弯曲部7向上下方向中的任一方向弯曲的效果。
另外,其他效果与上述第一实施方式相同。