一种伴飞无人机系统及其控制方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及无人机控制领域,更具体地,涉及一种伴飞无人机系统及其控制方法。
背景技术
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,目前已经广泛应用于陆地或者海洋空中侦察、监视、通信、反潜和电子干扰等领域中,不仅如此,随着人们对无人机的熟知与喜爱,也推动了民用无人机的发展,使无人机逐渐进入了普通人们的生活当中,如今,民用无人机的智能化程度已具有了较大幅度的提升,获得了更多无人机爱好者的追捧,其中无人机的伴飞功能就是广大无人机爱好者较为喜爱的智能功能之一。
无人机伴飞功能,表现为无人机伴随运动物体如车、船等一起运动,更灵活的完成监控、导航、拍摄等工作。而实现良好效果的伴飞功能的前提是实现高精准度的定位,现有技术中,实现无人机定位主要依赖于GPS定位或通过图形匹配等技术,但上述方法在无人机伴飞技术的设计和使用上会十分繁琐,而且存在可靠性低和效率低的缺陷,需要操作人员具有丰富的经验才能够灵活的操纵无人机进行伴飞操作,因此如何使用简单的结构与程序实现无人机的精准定位成为各大厂商日益关注的话题。
发明内容
本发明旨在克服上述现有技术的至少一种缺陷(不足),提供一种伴飞无人机系统及其控制方法,用于解决无人机智能伴飞、精准定位的问题。
本发明采取的技术方案是,
一种伴飞无人机系统,设有
移动平台,搭载于移动的物体上;
无人机,用于跟随所述移动平台;
信标,装载在所述移动平台上,所述信标设有定位模块,用于实现所述移动平台的定位信息;
通信模块,通过所述通信模块无线连接所述信标和所述无人机;
操作系统,连接所述通信模块,用于获取所述无人机与所述移动平台的位置信息,并设置操作指令,以控制所述无人机的飞行状态;
所述信标通过所述通信模块实时传递所述移动平台的位置信息给所述操作系统,所述操作系统发出操作指令给所述无人机,所述无人机执行所述操控指令,调整自己的飞行状态。
本方案中,通过设计一种无人机信标,可以使无人机伴飞对象与无人机互相获取具体位置关系,实现精准的定位,使得无人机体现良好的伴飞效果;具体工作过程包括,将信标安装于无人机的伴飞对象即移动平台上,在无人机的移动起飞,移动跟随,移动锁定以及移动降落等多个运动过程中,信标通过定位模块获取自身位置、定位状态及定向状态等多个定位信息,再通过通信模块实时把自身位置、定位状态及定向状态等多个定位信息发送给无人机,无人机接收到信标的信息,以及结合来自操作系统的指令,来作出调整自己的位置或者速度,达到伴飞运动物体的效果;
作为一种优选的实施方式,所述定位模块为RTK模块,所述定位模块设有定位天线,所述定位天线为RTK天线,且所述RTK天线数量为两条。
本方案中,定位模块采用RTK模块,且设置有两条RTK天线,其中RTK技术为(Real-time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,而本方案中采用双RTK天线结合RTK模块提供差分信息,可有效将位置精准度提高到厘米级,实现无人机伴飞的精准定位。
作为一种优选的实施方式,所述信标包括一种无人机伴飞盒,所述伴飞盒包括:盒体、电源模块、飞控模块,所述定位模块设有定位天线,所述通信模块设有通信天线,所述电源模块、飞控模块、定位模块以及通信模块均安装于所述盒体内部,所述定位天线与通信天线连接于所述盒体外部,所述飞控模块、定位模块以及通信模块均与所述电源模块相连,所述定位模块以及通信模块与所述飞控模块相连,所述定位天线与所述定位模块相连,所述通信天线与所述通信模块相连。
进一步的,所述通信模块包括数传模块以及4G模块,所述通信模块还设有通信天线,所述通信天线包括数传天线以及4G天线,所述数传天线与所述数传模块相连,所述4G天线与所述4G模块相连。
进一步的,所述数传模块包括P900数传盒以及XB PRO数传盒,所述数传天线设置为两条,两条所述数传天线分别与所述P900数传盒以及XB PRO数传盒相连。
本方案中,通信模块中包括数传模块以及4G模块,其中,数传模块可以用于接收无人机的差分数据或者无人机的飞行参数或无人机的拍摄信息等,以及回传自身位置、定位状态及定向状态等多个定位信息,而4G模块可以用于与无人机控制系统等进行通信,获取控制信号等。并且,本方案中,数传天线设置为两条,分别与不同数传模块相连,可有效通过不同数传模块传输不同信息,减少运算量,提高数据传输速度。
进一步的,所述无人机伴飞盒还包括电源转换盒,所述飞控模块、定位模块以及通信模块通过所述电源转换盒与所述电源模块相连。
进一步的,所述无人机伴飞盒还包括开关按钮及指示灯,所述开关按钮及指示灯设置于所述盒体内部,所述开关按钮及指示灯通过所述电源转换盒与所述电源模块相连。
本方案中,设置电源转换盒,可实现电池的电流转换,防止输出电流过大,从而烧坏电路及其他部件可有效提高安全性能。此外,本方案中伴飞盒还设置有开关按钮及指示灯,开关按钮设置在盒体内部,可以凸出或平齐于所述盒体侧盖,让使用者可以通过按下或回复开关按钮实现伴飞盒的电源通断,而指示灯则可以显示当前伴飞盒的通电是否,以便使用者了解伴飞盒实时使用状态。
进一步的,所述无人机伴飞盒还包括固定板,所述固定板安装于所述下盖内,位于所述电源模块、飞控模块、定位模块以及通信模块下方。本方案中,在盒体内各个模块下方设置固定板,所述固定板上可以设置多个排热孔,可有效在伴飞盒中各个模块工作过程中,实时进行散热,防止机器内部温度过高而造成损坏。
进一步的,所述上盖及下盖通过内六角沉头螺钉与所述侧盖相连。
本方案中,使用内六角沉头螺钉进行盒体各个部分安装固定,是因为内六角沉头螺钉具有易拆卸、便于安装等优点,且能起到很好地防滑的作用。
进一步的,所述上盖、下盖、侧盖以及固定板均设置为铝合金材料。
本方案中,盒体以及固定板等均使用铝合金材料进行制作,是因为铝合金材料具有质量轻、延展性好以及强度高等优点。
作为一种优选的实施方式,所述移动平台包括壳体、若干电磁铁、控制PCB板,所述电磁铁安装于所述壳体内部,与所述控制PCB板相连。
进一步的,所述壳体包括上板、下板、前护板、后护板、左护板以及后护板,所述上板及下板均与所述前护板、后护板、左护板以及后护板相连,所述定位天线与所述上板相连,所述通信天线与所述前护板相连。
进一步的,所述上板中部设置有若干电磁铁感应区域,所述电磁铁外侧设置有电磁铁固定件,所述电磁铁通过所述电磁铁固定件安装于所述电磁铁感应区域下方。
本方案中,在壳体上板中部设置电磁铁感应区域,电磁铁对应设置在下方,可使得在无人机降落后,电磁铁可将无人机吸引稳定于所述降落平台的中间位置,这样即使无人机降落有一定偏差也能使得所述降落平台有足够空间容纳无人机。此外,本方案中可设置八个电磁铁及对应8个电磁铁感应区域,呈两列对称排布,对应于无人机底部中间位置,能有效加强电磁铁磁力,且使得磁力均匀,防止在吸引无人机时失去平衡。
一种伴飞无人机控制方法,基于所述的伴飞无人机系统,所述无人机设有自检系统,用于自检无人机自身的故障,所述方法包括:
无人机的移动起飞,所述移动起飞包括:
操作系统发出起飞指令;
无人机启动自检系统,当自检通过时,执行起飞操作,当自检不通过时,拒绝起飞指令并反馈给无人机;
信标将移动平台的位置信息传递给操作系统,操作系统根据移动平台的位置信息,实时调整无人机的速度和位置。
作为一种优选的实施方式,所述移动起飞还包括
水平方向上,设定所述无人机与移动平台的相对不动;
竖直方向上,设定所述无人机相对所述移动平台慢慢上升。
作为一种优选的实施方式,所述移动起飞还包括
竖直方向上,当所述无人机到达竖直方向上的目标高度时,操作系统结束起飞指令,所述目标高度在2~5米之间设置。
作为一种优选的实施方式,
所述方法还包括:无人机的锁定跟随,所述锁定跟随包括:
操作系统确认所述无人机在竖直方向上到达目标高度后,发出锁定跟随指令;
无人机通过通信模块获取并执行锁定跟随指令,将信标的实时位置作为目标位置,实时调整无人机的速度和位置,保持无人机与移动平台在误差距离为n的情况下相对不动,n在0.01m~0.1m之间取值;
和/或,
所述方法还包括:无人机的自由伴飞,所述自由伴飞包括:
操作系统结束起飞指令后,无人机接收来自操控系统的调整指令,包括:水平方向调整指令、垂直方向调整指令以及偏航调整指令;
无人机通过通信模块获取并执行所述调整指令,将信标的实时位置作为目标位置,实时调整无人机的速度和位置;包括:
若无所述指令,则无人机执行锁定跟随操作;
若有水平方向调整指令,基于所述锁定跟随操作,根据设置的调整增量调节无人机在水平方向上相对平台的位置增量;
若有竖直方向调整指令,基于所述锁定跟随操作,根据设置的调整增量调节无人机在竖直方向上相对平台的位置增量;
若有偏航调整指令,基于所述锁定跟随操作,根据设置的相对相位角变量调节无人机与平台的相对相位角。
作为一种优选的实施方式,所述锁定跟随包括
水平方向上,当无人机与信标的实时水平位置相差大于n时,调整所述无人机相对所述信标的水平飞行速度,直到二者的水平位置相差小于n;
竖直方向上,所述操作系统发出第一垂直指令,使无人机与移动平台的相对高度与所述目标高度之差的绝对值小于n;
和/或,操作系统还发出偏航指令,以维持无人机和移动平台的相对方位角不变。
作为一种优选的实施方式,所述方法还包括:
无人机的返航降落,所述返航降落包括:
操作系统发送返航指令,无人机通过通信模块获取并执行返航指令,将信标的实时位置作为目标位置,实时调整无人机的速度和位置,以控制无人机飞行到信标的正上方,并维持当前飞行状态;
操作系统确认无人机飞行到信标的正上方后,进一步发送降落指令到无人机和平台;
进一步控制无人机在竖直方向上相对降落;
无人机降落到平台后,操作系统发送闭锁指令给无人机,关闭无人机电源。
作为一种优选的实施方式,所述移动平台设有电磁开关,用于通电产生磁吸固定降落的无人机,所述无人机设有脚架、电源,所述脚架为磁性材质,
所述降落返航还包括:平台收到降落指令后,打开电磁开关,通过磁吸固定降落的无人机。
与现有技术相比,本发明的有益效果为:
通过与无人机的通信以及定位信息交换,使得无人机调整自己的位置或者速度,达到伴飞运动物体以及精准降落的效果;
定位模块为RTK模块,定位天线为RTK天线,且RTK天线数量为两条,可有效将位置精准度提高到厘米级,实现无人机伴飞的高精准定位;
移动平台内还设置有电磁铁,可在无人机降落后有效吸引无人机,使之保持稳定状态,防止由于车辆持续运动无人机在平台上不稳而造成损坏。
本发明还进一步公开了无人机伴飞控制方法,通过信标与无人机的准确定位通讯,实时调整无人机的飞行矢量——速度和方向,在水平方向、竖直方向、相对相位角三个维度上设置无人机的飞行变量,实现移动起飞、锁定跟随、自由伴飞、返航降落多种无人机飞行控制方式,控制方式灵活、快捷。
附图说明
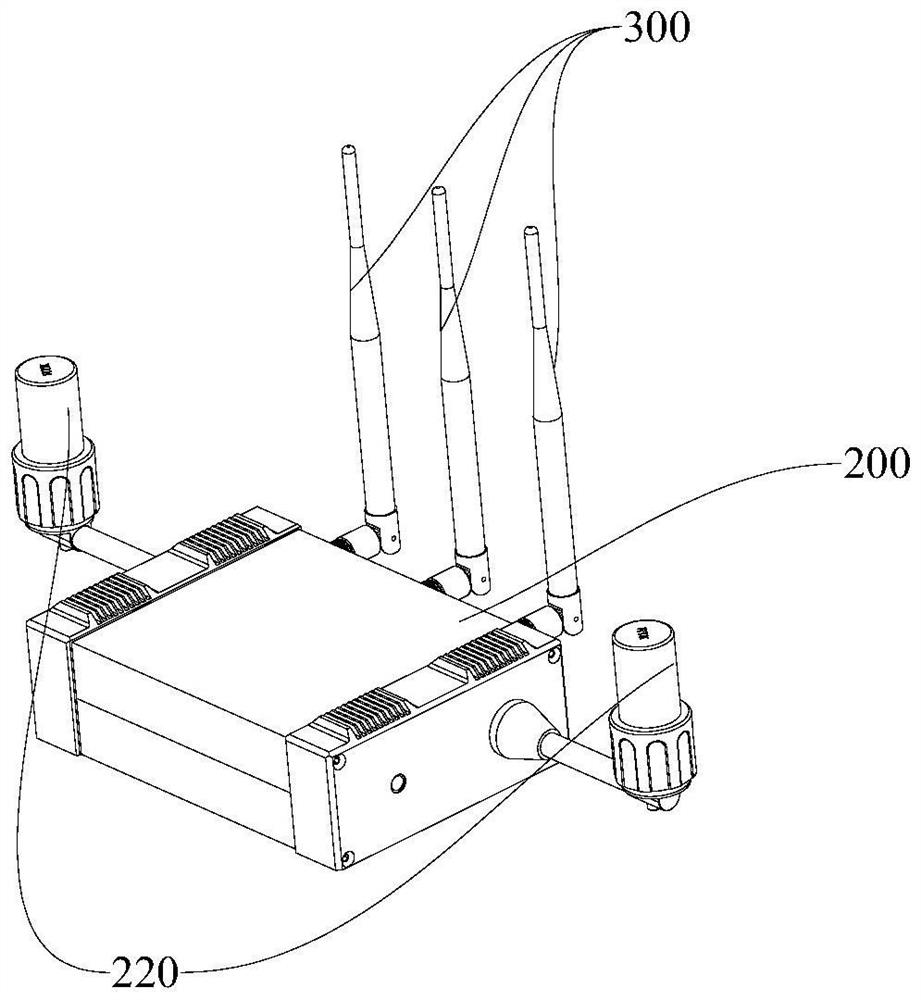
图1为本发明的信标、通讯模块的结构图。
图2为本发明的信标的爆炸图。
图3为本发明的信标的爆炸图。
图4为本发明的平台的爆炸图。
图5为本发明的平台与信标组合的结构图。
图中,移动平台100,壳体110,上板111,下板112,前护板113,后护板114,左护板115,右护板116,电磁铁120,控制PCB板130,信标200,盒体210,上盖211,下盖212,侧盖213,开关按钮214,指示灯215,固定板216,内六角沉头螺钉217,定位模块220,RTK模块221,RTK天线222,电源模块230,电源转换盒231,通信模块300,数传天线311,P900数传盒321,XBPRO数传盒322,4G天线331,4G模块340,飞控模块350。
具体实施方式
本发明附图仅用于示例性说明,不能理解为对本发明的限制。为了更好说明以下实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
实施例1
如图1-5所示,如图1所示,一种伴飞无人机系统,设有
移动平台100,搭载于移动的物体上;
无人机,用于跟随所述移动平台100;
信标200,装载在所述移动平台100上,所述信标200设有定位模块220,用于实现所述移动平台100的定位信息;
通信模块300,通过所述通信模块300无线连接所述信标200和所述无人机;
操作系统,连接所述通信模块300,用于获取所述无人机与所述移动平台100的位置信息,并设置操作指令,以控制所述无人机的飞行状态;
所述信标200通过所述通信模块300实时传递所述移动平台100的位置信息给所述操作系统,所述操作系统发出操作指令给所述无人机,所述无人机执行所述操控指令,调整自己的飞行状态。
本方案中,通过设计一种无人机信标200,可以使无人机伴飞对象与无人机互相获取具体位置关系,实现精准的定位,使得无人机体现良好的伴飞效果;具体工作过程包括,将信标200安装于无人机的伴飞对象即移动平台100上,在无人机的移动起飞,移动跟随,移动锁定以及移动降落等多个运动过程中,信标200通过定位模块220获取自身位置、定位状态及定向状态等多个定位信息,再通过通信模块300实时把自身位置、定位状态及定向状态等多个定位信息发送给无人机,无人机接收到信标200的信息,以及结合来自操作系统的指令,来作出调整自己的位置或者速度,达到伴飞运动物体的效果;
作为一种优选的实施方式,所述定位模块220为RTK模块221,所述定位模块220设有定位天线,所述定位天线为RTK天线222,且所述RTK天线222数量为两条。
本方案中,定位模块220采用RTK模块221,且设置有两条RTK天线222,其中RTK技术为(Real-time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,而本方案中采用双RTK天线222结合RTK模块221提供差分信息,可有效将位置精准度提高到厘米级,实现无人机伴飞的精准定位。
作为一种优选的实施方式,所述信标200包括一种无人机伴飞盒,所述伴飞盒包括:盒体210、电源模块230、飞控模块350,所述定位模块220设有定位天线,所述通信模块300设有通信天线,所述电源模块230、飞控模块350、定位模块220以及通信模块300均安装于所述盒体210内部,所述定位天线与通信天线连接于所述盒体210外部,所述飞控模块350、定位模块220以及通信模块300均与所述电源模块230相连,所述定位模块220以及通信模块300与所述飞控模块350相连,所述定位天线与所述定位模块220相连,所述通信天线与所述通信模块300相连。
进一步的,所述通信模块300包括数传模块以及4G模块340,所述通信模块300还设有通信天线,所述通信天线包括数传天线311以及4G天线331,所述数传天线311与所述数传模块相连,所述4G天线331与所述4G模块340相连。
进一步的,所述数传模块包括P900数传盒321以及XB PRO数传盒322,所述数传天线311设置为两条,两条所述数传天线311分别与所述P900数传盒321以及XB PRO数传盒322相连。
本方案中,通信模块300中包括数传模块以及4G模块340,其中,数传模块可以用于接收无人机的差分数据或者无人机的飞行参数或无人机的拍摄信息等,以及回传自身位置、定位状态及定向状态等多个定位信息,而4G模块340可以用于与无人机控制系统等进行通信,获取控制信号等。并且,本方案中,数传天线311设置为两条,分别与不同数传模块相连,可有效通过不同数传模块传输不同信息,减少运算量,提高数据传输速度。
进一步的,所述无人机伴飞盒还包括电源转换盒231,所述飞控模块350、定位模块220以及通信模块300通过所述电源转换盒231与所述电源模块230相连。
进一步的,所述无人机伴飞盒还包括开关按钮214及指示灯215,所述开关按钮214及指示灯215设置于所述盒体210内部,所述开关按钮214及指示灯215通过所述电源转换盒231与所述电源模块230相连。
本方案中,设置电源转换盒231,可实现电池的电流转换,防止输出电流过大,从而烧坏电路及其他部件可有效提高安全性能。此外,本方案中伴飞盒还设置有开关按钮214及指示灯215,开关按钮214设置在盒体210内部,可以凸出或平齐于所述盒体210侧盖213,让使用者可以通过按下或回复开关按钮214实现伴飞盒的电源通断,而指示灯215则可以显示当前伴飞盒的通电是否,以便使用者了解伴飞盒实时使用状态。
进一步的,所述无人机伴飞盒还包括固定板216,所述固定板216安装于所述下盖212内,位于所述电源模块230、飞控模块350、定位模块220以及通信模块300下方。本方案中,在盒体210内各个模块下方设置固定板216,所述固定板216上可以设置多个排热孔,可有效在伴飞盒中各个模块工作过程中,实时进行散热,防止机器内部温度过高而造成损坏。
进一步的,所述上盖211及下盖212通过内六角沉头螺钉217与所述侧盖213相连。
本方案中,使用内六角沉头螺钉217进行盒体210各个部分安装固定,是因为内六角沉头螺钉217具有易拆卸、便于安装等优点,且能起到很好地防滑的作用。
进一步的,所述上盖211、下盖212、侧盖213以及固定板216均设置为铝合金材料。
本方案中,盒体210以及固定板216等均使用铝合金材料进行制作,是因为铝合金材料具有质量轻、延展性好以及强度高等优点。
作为一种优选的实施方式,所述移动平台100包括壳体110、若干电磁铁120、控制PCB板130,所述电磁铁120安装于所述壳体110内部,与所述控制PCB板130相连。
进一步的,所述壳体110包括上板111、下板112、前护板113、后护板114、左护板115以及右护板116,所述上板111及下板112均与所述前护板113、后护板114、左护板115以及右护板116相连,所述定位天线与所述上板111相连,所述通信天线与所述前护板113相连。
进一步的,所述上板111中部设置有若干电磁铁感应区域,所述电磁铁120外侧设置有电磁铁120固定件,所述电磁铁120通过所述电磁铁120固定件安装于所述电磁铁感应区域下方。
本方案中,在壳体110上板111中部设置电磁铁感应区域,电磁铁120对应设置在下方,可使得在无人机降落后,电磁铁120可将无人机吸引稳定于所述降落平台的中间位置,这样即使无人机降落有一定偏差也能使得所述降落平台有足够空间容纳无人机。此外,本方案中可设置八个电磁铁120及对应8个电磁铁感应区域,呈两列对称排布,对应于无人机底部中间位置,能有效加强电磁铁120磁力,且使得磁力均匀,防止在吸引无人机时失去平衡。
一种伴飞无人机控制方法,基于所述的伴飞无人机系统,所述无人机设有自检系统,用于自检无人机自身的故障,所述方法包括:
无人机的移动起飞,所述移动起飞包括:
操作系统发出起飞指令;
无人机启动自检系统,当自检通过时,执行起飞操作,当自检不通过时,拒绝起飞指令并反馈给无人机;
信标200将移动平台100的位置信息传递给操作系统,操作系统根据移动平台100的位置信息,实时调整无人机的速度和位置。
作为一种优选的实施方式,所述移动起飞还包括
水平方向上,设定所述无人机与移动平台100的相对不动;
竖直方向上,设定所述无人机相对所述移动平台100慢慢上升。
作为一种优选的实施方式,所述移动起飞还包括
竖直方向上,当所述无人机到达竖直方向上的目标高度时,操作系统结束起飞指令,所述目标高度在2~5米之间设置。
作为一种优选的实施方式,
所述方法还包括:无人机的锁定跟随,所述锁定跟随包括:
操作系统确认所述无人机在竖直方向上到达目标高度后,发出锁定跟随指令;
无人机通过通信模块300获取并执行锁定跟随指令,将信标200的实时位置作为目标位置,实时调整无人机的速度和位置,保持无人机与移动平台100在误差距离为n的情况下相对不动,n在0.01m~0.1m之间取值;
和/或,
所述方法还包括:无人机的自由伴飞,所述自由伴飞包括:
操作系统结束起飞指令后,无人机接收来自操控系统的调整指令,包括:水平方向调整指令、垂直方向调整指令以及偏航调整指令;
无人机通过通信模块300获取并执行所述调整指令,将信标200的实时位置作为目标位置,实时调整无人机的速度和位置;包括:
若无所述指令,则无人机执行锁定跟随操作;
若有水平方向调整指令,基于所述锁定跟随操作,根据设置的调整增量调节无人机在水平方向上相对平台的位置增量;
若有竖直方向调整指令,基于所述锁定跟随操作,根据设置的调整增量调节无人机在竖直方向上相对平台的位置增量;
若有偏航调整指令,基于所述锁定跟随操作,根据设置的相对相位角变量调节无人机与平台的相对相位角。
作为一种优选的实施方式,所述锁定跟随包括
水平方向上,当无人机与信标200的实时水平位置相差大于n时,调整所述无人机相对所述信标200的水平飞行速度,直到二者的水平位置相差小于n;
竖直方向上,所述操作系统发出第一垂直指令,使无人机与移动平台100的相对高度与所述目标高度之差的绝对值小于n;
和/或,操作系统还发出偏航指令,以维持无人机和移动平台100的相对方位角不变。
作为一种优选的实施方式,所述方法还包括:
无人机的返航降落,所述返航降落包括:
操作系统发送返航指令,无人机通过通信模块300获取并执行返航指令,将信标200的实时位置作为目标位置,实时调整无人机的速度和位置,以控制无人机飞行到信标200的正上方,并维持当前飞行状态;
操作系统确认无人机飞行到信标200的正上方后,进一步发送降落指令到无人机和平台;
进一步控制无人机在竖直方向上相对降落;
无人机降落到平台后,操作系统发送闭锁指令给无人机,关闭无人机电源。
作为一种优选的实施方式,所述移动平台100设有电磁开关,用于通电产生磁吸固定降落的无人机,所述无人机设有脚架、电源,所述脚架为磁性材质,
所述降落返航还包括:平台收到降落指令后,打开电磁开关,通过磁吸固定降落的无人机。
与现有技术相比,本发明的有益效果为:
通过与无人机的通信以及定位信息交换,使得无人机调整自己的位置或者速度,达到伴飞运动物体以及精准降落的效果;
定位模块220为RTK模块221,定位天线为RTK天线222,且RTK天线222数量为两条,可有效将位置精准度提高到厘米级,实现无人机伴飞的高精准定位;
移动平台100内还设置有电磁铁120,可在无人机降落后有效吸引无人机,使之保持稳定状态,防止由于车辆持续运动无人机在平台上不稳而造成损坏。
本发明还进一步公开了无人机伴飞控制方法,通过信标200与无人机的准确定位通讯,实时调整无人机的飞行矢量——速度和方向,在水平方向、竖直方向、相对相位角三个维度上设置无人机的飞行变量,实现移动起飞、锁定跟随、自由伴飞、返航降落多种无人机飞行控制方式,控制方式灵活、快捷。
显然,本发明的上述实施例仅仅是为清楚地说明本发明技术方案所作的举例,而并非是对本发明的具体实施方式的限定。凡在本发明权利要求书的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。