一种车辆及其冗余制动控制方法
文献发布时间:2023-07-05 06:30:04
技术领域
本发明涉及一种车辆及其冗余制动控制方法,属于车辆制动控制技术领域。
背景技术
自动驾驶车辆主要依靠高精地图和智能感知系统,在无人工干预的情况下,通过车载控制计算机分析预测车辆、行人的行为和意图,以做出最优的行车决策,实现车辆对路径的最优规划,从而控制车辆正常行驶到达预设目的地。在考虑自动驾驶的制动系统时,主要是考虑在复杂的道路环境中如果制动系统出现故障,车辆应能及时合理地完成车辆的制动。
自动驾驶车辆在人工驾驶模式下,由人踩制动踏板使制动系统工作,从而实现车辆的制动,而自动驾驶模式下车辆的制动请求需由自动驾驶控制器下发到整车控制器,整车控制器请求制动系统实现制动;或整车控制器监控到自动驾驶模块有故障时,强制请求制动系统实现制动。车辆在复杂的道路环境中运行,当车辆制动遇到系统故障时,需要有一系列的冗余制动方案保证车辆可以正常制动。
发明内容
本发明的目的在于提供一种车辆及其冗余制动控制方法,用于解决在复杂道路环境中车辆的行车制动系统出现故障时难以及时合理地完成车辆制动的问题。
为了实现上述目的,本发明提供了一种车辆冗余制动控制方法,包括如下步骤:
1)在车辆的自动驾驶过程中,整车控制器检测自动驾驶模块及行车制动系统是否故障;
2)若自动驾驶模块故障,行车制动系统无故障,则通过行车制动系统进行行车制动;
若自动驾驶模块故障,行车制动系统故障,则通过电子驻车系统激活电子驻车;
若自动驾驶模块无故障,行车制动系统故障,且存在整车制动需求,则通过电子驻车系统进行行车制动。
本发明提供的车辆冗余制动控制方法,通过检测自动驾驶模块和行车制动系统是否故障,在自动驾驶模块故障而行车制动系统无故障时,通过行车制动系统进行行车制动,在自动驾驶模块和行车制动系统均故障时,通过电子驻车系统直接激活电子驻车,在自动驾驶模块无故障而行车制动系统故障时,若存在整车制动需求,则通过电子驻车系统进行行车制动。采用本发明,可实现车辆在复杂道路环境中行车制动系统发生故障时,仍可通过电子驻车系统进行行车制动,从而保证车辆能够及时有效地停车,减少意外事故的发生。
进一步地,在上述方法中,步骤2)中,在自动驾驶模块无故障且行车制动系统故障时,若整车制动需求为紧急制动,则通过电子驻车系统激活电子驻车,若整车制动需求为一般制动,则通过电机制动系统进行电制动;
根据车辆制动的目标减速度确定所述整车制动需求。
在自动驾驶模块无故障且行车制动系统故障时,还根据车辆制动的目标减速度来判断整车的制动需求,若整车制动需求为紧急制动,则通过电子驻车系统直接激活自动驻车,若整车制动需求为一般制动,则通过电机制动系统进行电制动。在整车制动需求不同时,采用不同方式进行冗余制动,从而保证车辆可以停车,减少意外事故的发生。
进一步地,在上述方法中,若目标减速度大于预设减速度阈值,则整车制动需求为紧急制动,若目标减速度小于预设减速度阈值,则整车制动需求为一般制动。
将车辆制动目标减速度大于预设减速度阈值的整车制动需求标定为紧急制动,将车辆制动目标减速度小于预设减速度阈值的整车制动需求标定为一般制动。采用制动减速度来判断整车制动需求,易于实现,操作简单。
进一步地,在上述方法中,若电机制动系统存在故障,则通过电子驻车系统进行行车制动。
在电机制动系统存在故障时,通过电子驻车系统进行行车制动,从而增强冗余制动能力,提高车辆安全性。
进一步地,在上述方法中,所述电子驻车系统包括驻车弹簧气室;在电机制动系统故障时,电子驻车系统根据预设减速度阈值,控制驻车弹簧气室进行排气,当驻车弹簧气室内气压达到设定气压时,车辆按照预设减速度阈值减速行驶。
电子驻车系统包括驻车弹簧气室,在电机制动系统发生故障时,电子驻车系统根据预设的减速度阈值,控制驻车弹簧气室进行部分排气,当驻车弹簧气室内气压达到设定气压时,车辆按照预设减速度阈值减速行驶。通过部分排气进行制动,使车辆按照一定的减速度进行减速,防止减速度过大影响车辆安全。
进一步地,在上述方法中,若电机制动系统内电机故障或电机制动能力不满足一般制动的整车制动需求,则认为电机制动系统存在故障。
对判断电机制动系统是否存在故障,提出两种具体的判断标准:电机制动系统内电机是否故障,或者电机制动能力是否能够满足一般制动的整车制动需求,通过其一即可进行判断,便于本发明的实施。
进一步地,在上述方法中,所述电子驻车系统包括驻车弹簧气室;所述驻车弹簧气室中的气压将弹簧压缩以解除驻车制动;步骤2)中,在自动驾驶模块无故障且行车制动系统故障时,若整车制动需求为紧急制动,则通过电子驻车系统进行行车制动,若整车制动需求为一般制动且电池回收能力受限,则通过电子驻车系统进行行车制动时,将驻车弹簧气室中的气压降为设定气压;所述设定气压通过线下标定得到,当驻车弹簧气室内气压达到设定气压时,车辆按照预设减速度阈值减速行驶。
还在整车制动需求为一般制动时,判断电池回收能量的能力是否受限,从而在电池回收能力受限时采用电子驻车系统部分排气的手段进行制动,从而提高车辆制动的冗余能力。
进一步地,在上述方法中,若目标减速度大于预设减速度阈值,则整车制动需求为紧急制动,若目标减速度小于预设减速度阈值,则整车制动需求为一般制动。
进一步地,在上述方法中,若自动驾驶模块与整车控制器通信故障,或者整车控制器收到自动驾驶模块发送的故障码,则认为自动驾驶模块故障。
通过两种较为简单的方式来判断自动驾驶模块是否故障,方法简单,易于实现。
本发明还提供一种车辆,包括整车控制器、自动驾驶控制器、行车制动系统、电机制动系统和电子驻车系统,整车控制器通信连接自动驾驶控制器、行车制动系统、电机制动系统和电子驻车系统,所述整车控制器执行指令实现上述的车辆冗余制动控制方法。
附图说明
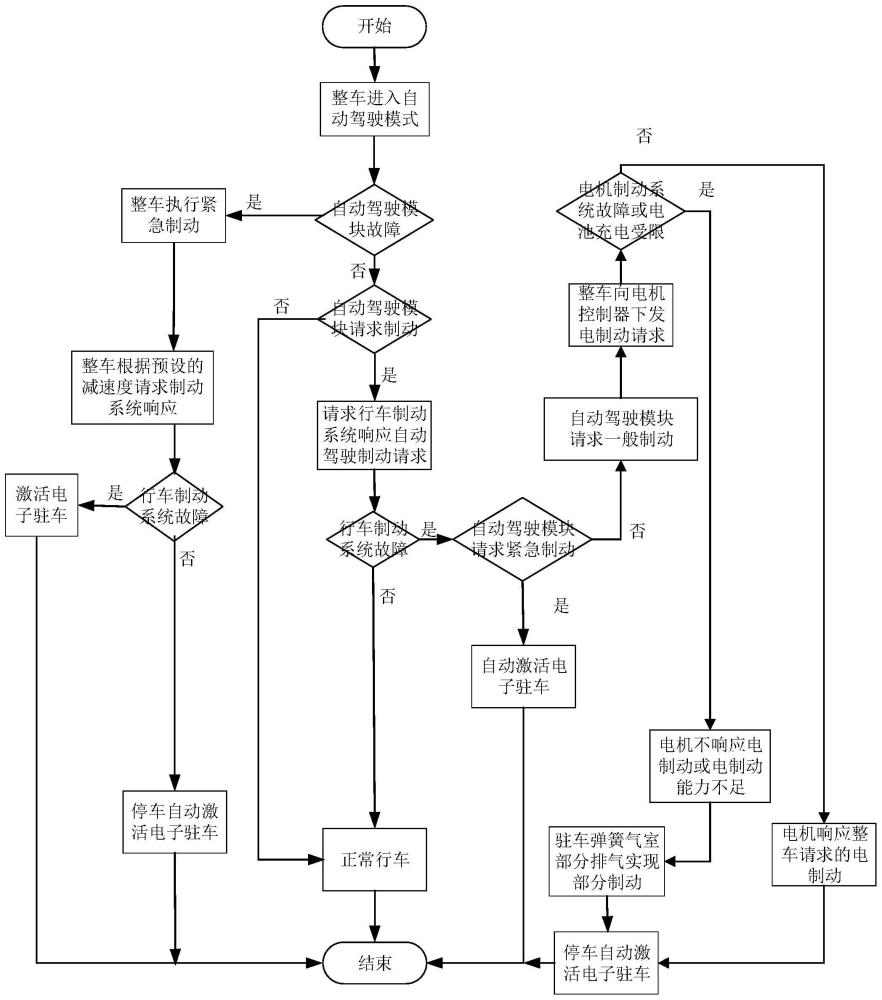
图1为本发明方法实施例中车辆冗余制动控制方法的流程图;
图2为本发明方法实施例中车辆制动系统的结构框图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明了,以下结合附图及实施例,对本发明进行进一步详细说明。
方法实施例:
本发明的车辆冗余制动控制方法,主要针对车辆进入自动驾驶模式后的制动控制过程,用于提高在自动驾驶模块存在故障时车辆制动的安全性。车辆冗余制动控制方法的流程如图1所示,包括如下步骤:
S1、整车在自动驾驶模式下,判断自动驾驶模块是否存在故障。若整车控制器与自动驾驶模块的智能控制器之间存在通讯故障,或者智能控制器发送故障码给整车控制器,则认为自动驾驶模块存在故障。
S2、在自动驾驶模块存在故障时,整车退出自动驾驶模式并执行紧急制动,由整车控制器根据预设的目标减速度,强制请求行车制动系统响应,进行紧急制动。若此时行车制动系统存在故障,则直接通过电子驻车系统进行行车制动,并在停车后激活电子驻车;若此时行车制动系统无故障,则由行车制动系统根据预设的目标减速度进行行车制动,并在停车后通过电子驻车系统激活电子驻车。
在自动驾驶模块无故障时,若整车无制动需求,则智能控制器控制车辆正常行车;若整车存在制动需求,则自动驾驶模块根据整车制动需求向整车控制器发出制动请求,由整车控制器向行车制动系统转发制动请求,行车制动系统接收制动请求并进行自检。
S3、若行车制动系统无故障,则响应制动请求进行行车制动;若行车制动系统存在故障,则向整车控制器反馈故障状态信息,整车控制器比较自动驾驶模块下发的目标减速度与预设的减速度阈值。
S4、若目标减速度大于预设的减速度阈值,则当前整车制动需求为紧急制动,整车控制器通过电子驻车系统直接激活电子驻车;若目标减速度小于预设的减速度阈值,则当前整车制动需求为一般制动,整车控制器向电机制动系统的电机控制器发送电制动请求,电机控制器接收电制动请求,并判断电机制动系统是否存在故障以及电池的充电受限能力。
S5、若电机制动系统的电机不响应电制动请求,或电机的制动能力无法满足电制动请求,则认为电机制动系统存在故障。若电池当前电量大于设定电量,或电池温度超过设定温度,则认为电池充电受限能力不足。
在电机制动系统存在故障,或者电池充电受限能力不足时,整车控制器根据预设的减速度阈值,控制电子驻车系统中电磁阀的开闭,调节驻车弹簧气室的排气量,通过部分排气使驻车弹簧气室内气压达到设定气压,此时车辆按照预设的减速度阈值制动停车,在车辆停车后驻车弹簧气室完全排气从而激活电子驻车。在电机制动系统无故障,且电池充电受限能力满足电制动请求带来的充电量时,电机响应电制动请求使车辆停车,并在车辆停车后由电子驻车系统自动激活电子驻车。
本实施例中,通过实验标定的方法得到预设减速度阈值与驻车弹簧其室内设定气压的关系。
采用本发明,可以实现车辆在自动驾驶过程中行车制动系统出现故障时的冗余制动控制,通过采用电机制动系统进行冗余制动控制,并按照车辆制动需求,根据目标减速度来调节电子驻车系统中驻车弹簧气室的排气,增强了制动能力,提升了车辆的制动安全性,降低了事故发生概率,保护了驾驶人员和乘车人员的生命财产安全。
车辆实施例:
本发明的车辆包括自动驾驶模块、整车控制器、行车制动系统EBS(ElectricalPark Brake)、电子驻车系统EPB(Electrical Brake System)、电机制动系统和电池管理系统。自动驾驶模块包括智能控制器,电子驻车系统EPB包括驻车弹簧气室和电磁阀,电机控制系统包括电机控制器和用于输出制动扭矩的电机,电机控制器控制连接电机。
如图2所示,整车控制器通过CAN线连接智能控制器、行车制动系统EBS、电机控制器和电池管理系统,还通过硬线连接电子驻车系统EPB。其中,智能控制器CAN线向整车控制器发送制动请求,整车控制器向行车制动系统EBS转发主动请求,并接收行车制动系统EBS的故障状态信息;整车控制器通过CAN线向电机控制器发送电制动请求和转矩请求,并获取电池管理系统发送的充电受限能力,电机控制器向整车控制器反馈故障状态信息,并在无故障时响应电制动请求,以通过电机实现电制动;整车控制器通过向电子驻车系统EPB发送电磁阀工作指令实现电磁阀开度的调节,通过调节电磁阀的开度使驻车弹簧气室部分排气,实现整车部分制动,整车控制器还通过向电子驻车系统EPB发送激活指令,实现电子驻车系统的自动电子驻车。
本发明的车辆采用方法实施例中的车辆冗余制动控制方法,关于该方法的实现,在方法实施例中已经介绍的清楚明白,此处不再赘述。