一种基于车辆后视镜摄像头补盲方法
文献发布时间:2024-01-17 01:13:28
技术领域
本发明涉及车辆后视镜补盲的技术领域,尤其是涉及一种基于车辆后视镜摄像头补盲方法。
背景技术
汽车上一般安装有三个后视镜,即左右后视镜和车内后视镜,用于观测汽车正后方和侧后方的情况,方便驾驶者安全行驶。
虽然汽车技术日新月异,但汽车后视镜的盲区一直存在,由于汽车后视镜视野有限,导致在转弯或者并线的过程中容易因没有注意到盲区的车辆而发生刮蹭事故,使驾驶者的生命安全和财产安全造成伤害。
发明内容
根据现有技术存在的不足,本发明的目的是提供一种基于车辆后视镜摄像头补盲方法,具有对车辆后视镜盲区进行补充,从而保护驾驶者的生命安全和财产安全的效果。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种基于车辆后视镜摄像头补盲方法,包括以下步骤:
1)、发动汽车时,盲区监测单元对汽车前后方向及底部进行监测,并显示在车辆中控台上;
2)、车俩行驶时,盲区监测单元对车辆左右盲区位置进行实时监测;
3)、盲区监测单元将车辆周围的视频图像传递到电子控制单元内;
4)、电子控制单元分析并计算车辆周围障碍物是否会对车辆产生碰撞,并通过执行单元对驾驶者进行提示;
5)、障碍物靠近车辆时在汽车中控上显示车辆周围影像,辅助驾驶者操作车辆;
6)、在车辆周围存在障碍物时判断是否存在转向命令;
7)、转向命令存在时对转向方向进行危险性判断,并在存在危险性时强制控制车辆停止转向。
本发明在一较佳示例中可以进一步配置为:所述步骤1)中的盲区监测单元包括分别设置于车辆前侧、后侧、左前侧和右前侧的前摄像头、后摄像头、左摄像头和右摄像头,左摄像头和右摄像头分别位于左后视镜和右后视镜底部;
电子控制单元能够将所述盲区监测单元的信息进行处理及判断,将信号输出至对应终端;
执行单元包括显示单元、报警单元和紧急制动单元,用于根据所述盲区监测单元的信息完成对应动作,保证行驶安全。
本发明在一较佳示例中可以进一步配置为:所述盲区监测单元能够在车辆靠近时获取汽车周围的盲区视频图像,合成处理后输出到车内的显示单元上显示,使驾驶者可通过显示单元观察到车辆四周的视频图像,从而补全后视镜的视角盲区;
盲区监测单元监测到车辆四周较近处存在车辆时控制报警单元报警,指示灯闪烁,提醒驾驶者注意小心驾驶。
本发明在一较佳示例中可以进一步配置为:所述盲区监测单元还包括固定于车辆前侧的转向角传感器,转向角传感器与电子控制单元电性连接;
电子控制单元可以计算移动物体和当前车辆的相对速度,当相对速度大于系统设定的阈值时,打开转向灯会触发报警单元报警,提醒驾驶者不能变道;
当驾驶者强行朝向移动物体的方向转向时,转向角传感器监测到车辆方向变化,通过电子控制单元控制紧急制动单元工作,及时对车辆进行制动并恢复车辆的初始运动方向。
本发明在一较佳示例中可以进一步配置为:车辆相对两侧设置有辅助监测单元,辅助监测单元为探测雷达,探测雷达与电子控制单元电性连接,在恶劣天气下,盲区监测单元成像清晰度较低时,驾驶者能够打开辅助监测单元监测车辆周围障碍物距离,并在显示装置上显示。
本发明在一较佳示例中可以进一步配置为:所述前摄像头和所述后摄像头均通过驱动电机与车辆进行连接,且所述电子控制单元与所述驱动电机电性连接;
当发动机启动时,电子控制单元将信号传递给驱动电机,驱动电机带动前摄像头和后摄像头转动,对车辆底部进行成像显示。
本发明在一较佳示例中可以进一步配置为:还包括成像过滤单元,所述成像过滤单元与盲区监测单元电性连接,成像过滤单元对盲区监测单元拍摄的距离车辆宽度超过一个车道的车辆进行屏蔽过滤,使不相邻车道上的车辆信息不会传递到电子控制单元处。
本发明在一较佳示例中可以进一步配置为:所述报警单元包括车内警报灯和车外警报灯,车内警报灯用于提醒驾驶者,车外警报灯用于提醒行人或车辆已进入车辆盲区。
本发明在一较佳示例中可以进一步配置为:当车辆靠近时,电子控制单元分析状况,并将状况分为可视情况和盲区情况;
可视情况下,报警单元报警,提醒驾驶者观察后视镜;
盲区情况下,报警单元报警,同时左摄像头或右摄像头成像于显示单元上,辅助驾驶者做出判断。
本发明在一较佳示例中可以进一步配置为:车辆内置有速度传感器,速度传感器与电子控制单元电性连接,后方相邻两侧车道有车辆快速接近并经过电子控制单元计算会在三至四秒内追上本车时,报警单元报警。
综上所述,本发明包括以下至少一种有益技术效果:
1、通过盲区监测单元、电子控制单元、辅助监测单元和执行单元的配合,通过左摄像头和右摄像头的设置,对行驶中的汽车的左右盲区进行补充,保证行驶安全,通过前摄像头、后摄像头和驱动电机的配合,在汽车发动时对汽车的前后盲区进行补充,防止起步时撞到低矮的障碍物,有效地提高了驾驶的安全性。
2、通过辅助监测单元的设置,在雨雪或大雾等恶劣天气下,摄像头拍摄精度较低时,监测雷达工作替代摄像头工作,探测车辆周围障碍物的距离,从而进一步的提高了驾驶安全性。
3、通过转向角传感器、盲区监测单元和电子控制单元的配合,当车辆转向存在危险时,驾驶者朝向危险方向转向时,转向角传感器监测到车辆转向,电子控制单元控制车辆方向回复,防止车辆受到撞击,同时车辆的危险报警闪光灯打开,提醒周围车辆注意躲避。
4、通过成像过滤单元的设置,对距离车辆宽度超过一个车道的车辆进行屏蔽过滤,使不相邻车道上的车辆信息不会传递到所述电子控制单元处,提高盲区监测的精确性。
附图说明
图1是本发明的程序图;
图2是本发明的系统图;
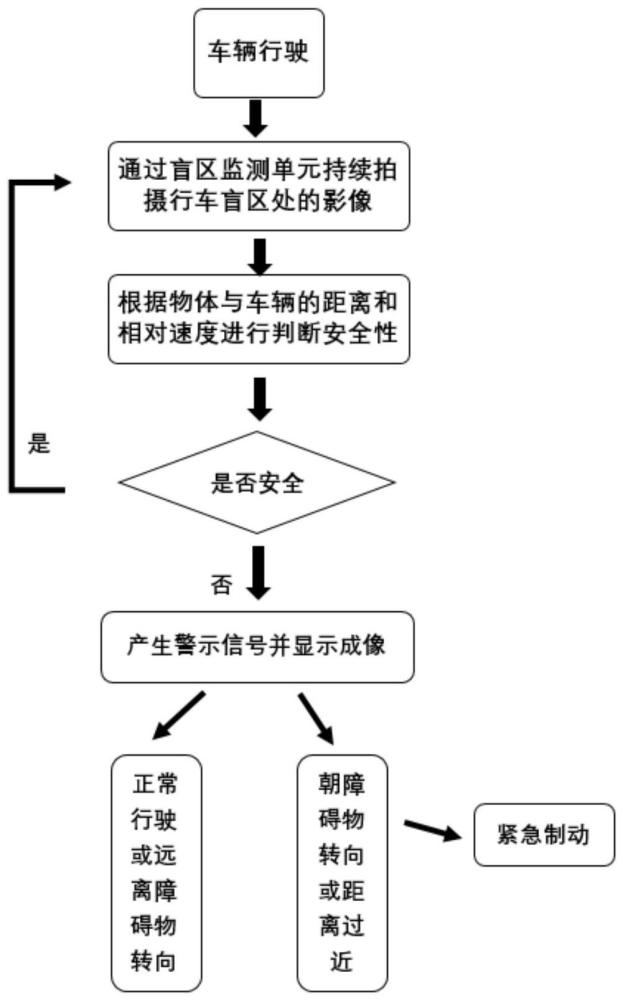
图3是本发明中基于车辆后视镜摄像头补盲方法的流程图。
图中,1、盲区监测单元;11、转向角传感器;2、电子控制单元;3、执行单元;31、显示单元;32、报警单元;33、紧急制动单元;4、辅助监测单元;5、驱动电机;6、成像过滤单元。
具体实施方式
以下结合附图对本发明作进一步详细说明。
实施例:
参照图1至图3,本发明公开的一种基于车辆后视镜摄像头补盲方法,包括以下步骤:
1)、发动汽车时,盲区监测单元1对汽车前后方向及底部进行监测,并显示在车辆中控台上,由于车辆停止后前后盲区内可能会有孩童或动物进入,特别是在驾驶大型货车时盲区较大,因此能够提醒驾驶者车辆前后是否存在障碍物,防止起步发生碰撞。
2)、车俩行驶时,盲区监测单元1对车辆左右盲区位置进行实时监测。
盲区监测单元1包括分别设置于车辆前侧、后侧、左前侧和右前侧的前摄像头、后摄像头、左摄像头和右摄像头,前摄像头和后摄像头不但能够在起步时检测车辆盲区,也能在发生交通事故时,代替行车记录仪使用,判断是否存在追尾或被追尾。
摄像头使用全方位侧摄像头,可显示后方约100m的图像,图像显示效果较为清晰。
左摄像头和右摄像头分别位于左后视镜和右后视镜底部,对车辆两侧的盲区监测效果好,同时不引人注意,美观性较高。
盲区监测单元1根据拍摄影像侦测结果判断场景影像中是否有移动物体影像,以确认行车视觉盲区中是否有行人或车辆等移动物体。根据行车速度与影像中物体的相对速度判断物体是否处于移动状态。
车辆相对两侧设置有辅助监测单元4,辅助监测单元4为探测雷达,探测雷达与电子控制单元2电性连接。在恶劣天气下,盲区监测单元1成像清晰度较低时,驾驶者能够打开辅助监测单元4监测车辆周围障碍物距离,代替摄像头工作,从而进一步的提高了驾驶安全性。
探测雷达的种类为毫米波雷达,可识别高度为50cm以上的物体。毫米波雷达可以感知后方来到的车辆、自行车等移动物体。毫米波雷达向外发射电磁波,电磁波遇到障碍物被反射回来,反射回来的回波被雷达接收,经过电子控制单元2的信号处理和运算,得到障碍物的距离和速度等物理信息。
3)、盲区监测单元1将车辆周围的视频图像传递到电子控制单元2内。电子控制单元2能够将所述盲区监测单元1的信息进行处理及判断,将信号输出至对应终端。
所述前摄像头和所述后摄像头均通过驱动电机5与车辆进行连接,且所述电子控制单元2与所述驱动电机5电性连接,驱动电机5工作能够调节前摄像头和后摄像头的角度,初始状态下,前摄像头和后摄像头分别对车辆前下方和后下方进行监测。
当发动机启动时,电子控制单元2将信号传递给驱动电机5,驱动电机5带动前摄像头和后摄像头转动,对车辆底部进行成像显示。
还包括成像过滤单元6,所述成像过滤单元6与盲区监测单元1电性连接。成像过滤单元6对盲区监测单元1拍摄的距离车辆宽度超过一个车道的车辆进行屏蔽过滤,使不相邻车道上的车辆信息不会传递到电子控制单元2处,电子控制单元2也不会对其进行数据分析。
4)、电子控制单元2分析并计算车辆周围障碍物是否会对车辆产生碰撞,并通过执行单元3对驾驶者进行提示。
执行单元3包括显示单元31、报警单元32和紧急制动单元33,用于根据所述盲区监测单元1的信息完成对应动作,保证行驶安全。
显示单元31设置于车内,盲区监测单元1能够在车辆靠近时获取汽车周围的盲区视频图像,合成处理后输出到车内的显示单元31上显示,使驾驶者可通过显示单元31观察到车辆四周的视频图像,从而补全后视镜的视角盲区。
所述报警单元32包括车内警报灯和车外警报灯,车内警报灯用于提醒驾驶者,盲区监测单元1监测到车辆四周较近处存在车辆时控制报警单元32报警,指示灯闪烁,提醒驾驶者注意小心驾驶。车外警报灯用于提醒行人或周围车辆已进入本车辆盲区。
5)、障碍物靠近车辆时在汽车中控上显示车辆周围影像,从而实现后视镜补盲的功能,实现更加安全的驾驶功能,并辅助驾驶者操作车辆及时作出反应。
当车辆需要停在某处时或穿过较窄的道路时,前摄像头、后摄像头、左摄像头和右摄像头四个摄像头获取的视频图像经过视频分割,并通过电子控制单元2的计算,合成为一个画面加以显示在屏幕上,补盲效果更加理想,进一步的方便了驾驶者驾驶。
6)、在车辆周围存在障碍物时判断是否存在转向命令。所述盲区监测单元1还包括固定于车辆前侧的转向角传感器11,转向角传感器11与电子控制单元2电性连接。当车辆转动时,转向角传感器11能够监测到车辆转动,并将信号传递给电子控制单元2。
7)、转向命令存在时对转向方向进行危险性判断。电子控制单元2可以计算移动物体和当前车辆的相对速度,当相对速度大于系统设定的阈值时,打开转向灯会触发报警单元32报警,提醒驾驶者不能变道。
当驾驶者强行朝向移动物体的方向转向时,转向角传感器11监测到车辆方向变化,通过电子控制单元2控制紧急制动单元33工作,及时对车辆进行制动并恢复车辆的初始运动方向。当驾驶者不朝向移动物体的方向转向时,车辆能够正常运动。
车辆内置有速度传感器,速度传感器与电子控制单元2电性连接。当车辆在道路上以大于十五公里时速正常行驶,后方相邻两侧车道有车辆快速接近并经过电子控制单元2计算会在三至四秒内追上本车时,报警单元32报警,提醒侧后方有来车,请注意安全。报警提示直到该车基本与本车平齐时候灯光熄灭。
在后侧有车辆通过时,打开该侧转向灯准备变道时,报警单元32会剧烈报警,提示注意变道安全。
当车辆靠近时,电子控制单元2分析状况,并将状况分为可视情况和盲区情况。
可视情况下,报警单元32报警,提醒驾驶者观察后视镜即可,不在显示单元31上成像,防止其分散驾驶者的注意力。
盲区情况下,报警单元32报警,同时左摄像头或右摄像头成像于显示单元31上,辅助驾驶者做出判断。
上述实施例的实施原理为:
1)、发动汽车时,盲区监测单元1对汽车前后方向进行监测,并显示在车辆中控台上;
2)、车俩行驶时,盲区监测单元1对车辆左右盲区位置进行实时监测;
3)、盲区监测单元1将车辆周围的视频图像传递到电子控制单元2内;
4)、电子控制单元2分析并计算车辆周围障碍物是否会对车辆产生碰撞,并通过执行单元3对驾驶者进行提示;
5)、障碍物靠近车辆时在汽车中控上显示车辆周围影像,辅助驾驶者操作车辆;
6)、在车辆周围存在障碍物时判断是否存在转向命令;
7)、转向命令存在时对转向方向进行危险性判断,并在存在危险性时强制控制车辆停止转向。
本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。