一种智能调节动漫制作透写台
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及动漫制作设备技术领域,具体为一种智能调节动漫制作透写台。
背景技术
动漫制作分为二维动画与三维动画技术,像网页上流行的flash动画就属于二维动画;最有魅力并运用最广的当属三维动画,包括我们见到的动画制作大片,电视广告片头,建筑动画等都要运用三维动画技术。动画制作是一个需要密切配合的团体活动。因此一部好作品除了有好的脚本,经验丰富的导演,当然,具有魅力的人物塑造是使作品更吸引人的重要因素。在动漫制作工作中常会使用到一种透写台来进行绘画,透写台一般由机体、发光源和透光板组成,是绘图、二维动画制作的重要工具。在使用的时候,需要将透写台平放在操作台上或者以支架上固定到某一角度倾斜,但是由于透写台平放在操作台上长时间使用,固定角度的透写台在使用的时候,使得脊椎造成一定劳损,而由于操作者不同,固定角度的固定架不一定适用于所有人,因此需要有一种可根据实际需要能不仅可以平放还可以倾斜放置在操作台上的透写台。
现有技术中的透写台主要为工作台以及支撑架组成的,在使用时需要在工作台上进行绘画,需要进行角度调节时由于工作台和支撑架之间使用转轴进行连接的,所以可支架通过转动工作台来调节工作台和支撑架之间的角度来达到倾斜目的,但现有装置为了角度较为精准其阻尼设置的一般较大,在进行调节时需要耗费较大的力气才能实现角度的调节实用性较低。
同时,现有技术中的工作台为了保持透光一般都是使用透明或者半透明的玻璃以及亚克力制成的,其在纸张放上去的时候由于玻璃表面和亚克力表面摩擦力较小极易导致纸张发生位移,导致绘画精准度的下降,而现有装置中缺乏对纸张的限位装置,实用性较不足。
而透写台在倾斜一定的角度后,需要绘画者在工作台上进行绘画,此时工作台上势必会受到来自绘画者的压力,长期承受来自绘画者的压力会导致工作台的转轴处承受较大的压力,导致转轴处寿命的减短,而现有装置缺乏对工作台辅助支撑的装置,使用寿命较低。
同时,现有的动漫绘画操作在绘画操作时一般会携带大量的工具,而这些工具在绘画时一般都是散落在桌面上的,不仅极易丢失还增加了绘画时查找工具的时间,使用起来存在诸多的不便。
发明内容
针对现有技术的不足,本发明提供了一种智能调节动漫制作透写台,具备方便调节工作台角度、可对纸张进行限位、可辅助支撑、方便收纳工具的优点,解决了上述背景技术中提出的问题。
本发明提供如下技术方案:一种智能调节动漫制作透写台,包括工作台,所述工作台左右两端靠近下方的位置上均固定安装有转轴,所述工作台的下方设有支撑架,所述工作台通过转轴与支撑架活动连接,所述支撑架的一端固定安装有支撑板,所述支撑板的顶端固定安装有电机,所述电机的输出轴与转轴的一端固定连接,所述支撑架底端靠近四角的位置上均固定安装有副吸盘。
优选的,所述工作台的正面开设有凹槽,所述凹槽的上下两端均开设有限位槽。
优选的,所述限位槽的内部活动卡接有限位条,所述限位条的数量为两个,两个所述限位条相对靠近的一端均固定安装有位于限位槽内部的限位弹簧。
优选的,所述工作台正面靠近下方的位置上固定安装有收纳槽,所述收纳槽的顶端等距离开设有通孔。
优选的,所述工作台正面靠近上方的位置上固定安装有灯座,所述灯座的正面活动安装有LED灯。
优选的,所述工作台底端的中部固定有固定块,所述固定块的底端固定安装有活动杆,所述活动杆的底端活动套接有固定杆。
优选的,所述固定杆的底端固定安装主吸盘,所述活动杆的底端固定安装有位于固定杆内部的缓冲弹簧,所述缓冲弹簧的底端与固定杆内腔的底端固定连接,所述主吸盘与副吸盘的底端处于同一水平面上。
优选的,还包括:控制终端,图像获取装置,数据处理器,图像处理装置,优化装置;
所述控制终端放置于所述工作台后端顶部;
所述图像获取装置放置于所述工作台的前端底部中间;
所述数据处理器放置于所述转轴左侧;
所述图像处理装置放置于所述转轴右侧;
所述优化装置放置于所述支撑板上端;
其中,所述控制终端与所述图像获取装置、数据处理器、图像处理装置以及所述优化装置相连接;
所述图像获取装置,用于获取所述转轴的受损图像,并通过所述图像处理装置对所述受损图像进行处理与分析,基于分析结果,对所述转轴的承压程度进行优化,具体工作过程包括:
所述图像获取装置,用于获取所述转轴的受损图像;
所述图像处理装置,用于提取所述受损图像的多个像素,并获取所述多个像素一一对应的原始灰阶;
同时,对所述多个像素一一对应的原始灰阶进行求和加权处理,确定所述受损图像的图像权重映射图;
所述图像处理装置,还用于将所述权值映射图进行直方图均衡化处理,获取所述受损图像的处理数据;
所述控制终端,用于接收所述受损图像的处理数据,并对所述转轴的受损图像的处理数据进行分析,获取分析结果;
同时,基于所述分析结果,控制启动所述优化装置;
所述优化装置,用于获取所述转轴的承压数据,同时,采用梯度投影法得到优化测量矩阵;
将所述分析结果放置于所述优化测量矩阵中,并采用正交匹配追踪算法对所述转轴的承压数据进行优化,并获取优化数据;
所述数据处理装置,用于接收所述优化数据,并对所述优化数据进行分解,获取分量数据;
同时,采用小波阈值函数对所述分量数据进行去噪处理,并采用小波变换法对所述转轴的承压程度进行优化,获取优化模型;
所述控制终端,还用于接收所述优化模型,并将所述优化模型保存在模型库中。
优选的,还包括,红外传感器,计算机,角度检测器,报警装置;
所述红外传感器放置于所述工作台的前侧;
所述角度检测器放置于所述支撑架并靠近所述工作台的左侧;
所述报警装置放置于所述工作台的后边;
其中,所述计算机与所述红外传感器、角度检测器以及所述报警装置相连接;
所述红外传感器,用于获取目标物距离所述工作台的距离,并通过计算机计算所述目标物的高度,通过所述高度,计算所述所述工作台的目标角度,具体工作过程包括:
所述红外传感器,用于获取所述目标物距离所述工作台的底部直线距离;
所述计算机,用于根据所述目标物距离所述工作台的距离,计算所述目标物的高度;
其中,h表示所述目标物的高度,η表示所述红外传感器的灵敏度,l表示所述目标物距离所述工作台的顶部直线距离,d表示所述目标物距离所述工作台的底部直线距离,u表示所述红外传感器的输出电压,p表示所述红外传感器的红外辐射功率,I表示所述红外传感器的输出电流,λ表示所述红外传感器的响应波长,t表示所述红外传感器的响应时间,Δf表示所述红外传感器的带宽,v表示所述红外传感器的响应速度,lg(·)表示以10为底的对数函数;
所述计算机,用于根据所述目标物的高度,确定所述工作台的目标角度;
其中,θ表示所述工作台的目标角度,β表示所述电机的工作效率,h表示所述目标物的高度,d表示所述目标物距离所述工作台的底部直线距离,δ表示所述电机的功率因素,log
基于所述工作台的目标角度与所述目标物的高度,控制所述电机以额定功率开始工作;
所述角度检测器,还用于检测所述电机带动所述转轴所旋转的角度是否到达所述工作台的目标角度;
若到达所述工作台的目标角度,所述控制终端控制所述报警装置进行报警操作,同时,控制所述电机停止工作;
否则,所述电机继续带动所述转轴进行旋转,直到到达所述工作台的目标角度。
与现有技术对比,本发明具备以下有益效果:
1、该智能调节动漫制作透写台,通过在工作台的左右两侧安装有转轴,并通过转轴与支撑架之间进行转动连接,当需要对工作台的角度进行调节时可通过开启电机带动转轴的旋转,此时工作台即可相对转轴之间发生旋转进而调整角度同时可通过工作台底端的副吸盘将该装置固定在地面上防止出现位移,从而实现了方便调节工作台角度的优点。
2、该智能调节动漫制作透写台,通过在工作台的正面开设有凹槽,并在凹槽的上下两端开设有限位槽以及在限位槽的内部活动活动安装有限位条,并在两个限位条之间安装有限位弹簧,当需要对纸张进行限位时可通过拉动限位条将限位条的底端与纸张之间进行固定,同时限位弹簧提供弹力对限位条进行限位辅助对纸张进行限位,从而实现了可对纸张进行限位的优点。
3、该智能调节动漫制作透写台,通过在工作台的底端固定有固定块以及在固定块的底端固定有活动杆,并套接有固定杆,在进行角度调节时位于固定杆底端的主吸盘即可与地面之间进行固定,同时工作台上所承载的压力会传导至活动杆上并通过活动杆底端的缓冲弹簧吸收压力避免转轴受损,从而实现了可辅助支撑的优点。
4、该智能调节动漫制作透写台,通过在工作台正面的底端固定有收纳槽,并在收纳槽的顶端等距离开设有通孔,在进行绘画操作时可将绘画时所使用的工具放置在收纳槽的内部进行收纳,同时通孔可以过滤到液体,防止工具的丢失以及方便查找,从而实现了方便收纳工具的优点。
5、通过图像获取装置获取转轴的受损图像,同时,提取受损图像的多个像素,从而有利于获取多个像素一一对应的原始灰阶,并对原始图像灰阶进行求和加权处理,从而精确确定受损图像的图像权重映射图,通过图像处理装置,对图像权重映射图进行直方图均衡化处理,从而可以高效获取受损图像的处理数据,通过控制终端对处理数据进行分析,从而有利于基于分析结果控制启动优化装置,通过优化装置获取转轴的承压数据,采用梯度投影法有利于获取优化测量矩阵,将分析结果放置于优化测量矩阵中,通过正交匹配追踪算法,有利于实现对转轴的承压数据的优化,将优化数据进行分解,获取的分量数据通过去噪处理,并通过小波变换法对转轴的承压程度进行优化,从而快速获取优化模型,通过控制终端,方便将优化模型保存在模型库中,有利于模型的保存,该方法大大提升了装置的准确性。
6、通过红外传感器获取目标物距离工作台的底部直线距离,进而有利于通过计算目标物的高度,从而确定工作台的目标角度,进而精确控制电机以额定功率工作,通过角度检测器,检测电机带动转轴所旋转的角度是否到达工作台的目标角度,从而确定电机停止工作的时间,提高了角度调节的准确性,该方法大大增加了装置的精确性与智能性。
附图说明
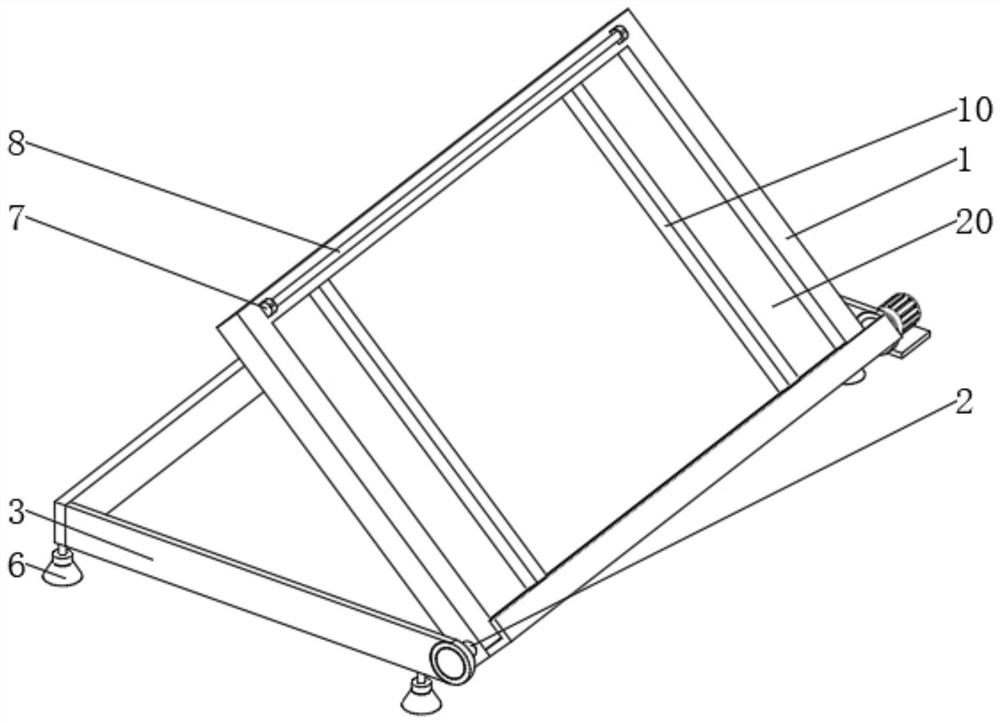
图1为本发明结构示意图;
图2为本发明侧面结构的示意图;
图3为本发明底端结构的示意图;
图4为本发明限位条结构的分解示意图;
图5为本发明内部结构的剖视图;
图6为图4中A处结构的放大示意图;
图7为本发明控制终端控制连接示意图;
图8为本发明计算机控制连接示意图。
图中:1、工作台;2、转轴;3、支撑架;4、支撑板;5、电机;6、副吸盘;7、灯座;8、LED灯;9、限位槽;10、限位条;11、限位弹簧;12、凹槽;13、收纳槽;14、通孔;15、固定块;16、活动杆;17、缓冲弹簧;18、固定杆;19、主吸盘。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,一种智能调节动漫制作透写台,包括工作台1,工作台1左右两端靠近下方的位置上均固定安装有转轴2,工作台1的下方设有支撑架3,工作台1通过转轴2与支撑架3活动连接,支撑架3的一端固定安装有支撑板4,支撑板4的顶端固定安装有电机5,电机5的输出轴与转轴2的一端固定连接,支撑架3底端靠近四角的位置上均固定安装有副吸盘6。
其中,工作台1的正面开设有凹槽12,凹槽12的上下两端均开设有限位槽9,凹槽12用于放置绘画所需要的纸张。
其中,限位槽9的内部活动卡接有限位条10,限位条10的数量为两个,两个限位条10相对靠近的一端均固定安装有位于限位槽9内部的限位弹簧11,需要对纸张进行限位时可通过拉动限位条10将限位条10的底端与纸张之间进行固定,同时限位弹簧11提供弹力对限位条10进行限位辅助对纸张进行限位。
其中,工作台1正面靠近下方的位置上固定安装有收纳槽13,收纳槽13的顶端等距离开设有通孔14,进行绘画操作时可将绘画时所使用的工具放置在收纳槽13的内部进行收纳,同时通孔14可以过滤到液体,防止工具的丢失以及方便查找。
其中,工作台1正面靠近上方的位置上固定安装有灯座7,灯座7的正面活动安装有LED灯8,通过LED灯可在绘画时进行辅助照亮。
其中,工作台1底端的中部固定有固定块15,固定块15的底端固定安装有活动杆16,活动杆16的底端活动套接有固定杆18,活动杆16可在固定杆18的内部相对滑动,来达到缓冲的作用。
其中,固定杆18的底端固定安装主吸盘19,活动杆16的底端固定安装有位于固定杆18内部的缓冲弹簧17,缓冲弹簧17的底端与固定杆18内腔的底端固定连接,主吸盘19与副吸盘6的底端处于同一水平面上,进行角度调节时位于固定杆18底端的主吸盘19即可与地面之间进行固定,同时工作台1上所承载的压力会传导至活动杆16上并通过活动杆16底端的缓冲弹簧17吸收压力避免转轴2受损。
工作原理:该智能调节动漫制作透写台在使用时,可将支撑架3底端的副吸盘6与桌面之间进行固定,需要对工作台1的角度进行调节时可通过开启电机5带动转轴2的旋转,此时工作台1即可相对转轴2之间发生旋转进而调整角度,需要对纸张进行限位时可通过拉动限位条10将限位条10的底端与纸张之间进行固定,同时限位弹簧11提供弹力对限位条10进行限位辅助对纸张进行限位,进行绘画操作时可将绘画时所使用的工具放置在收纳槽13的内部进行收纳。
本发明提供了一种智能调节动漫制作透写台,如图7所示,还包括:控制终端,图像获取装置,数据处理器,图像处理装置,优化装置;
所述控制终端放置于所述工作台1后端顶部;
所述图像获取装置放置于所述工作台1的前端底部中间;
所述数据处理器放置于所述转轴2左侧;
所述图像处理装置放置于所述转轴2右侧;
所述优化装置放置于所述支撑板4上端;
其中,所述控制终端与所述图像获取装置、数据处理器、图像处理装置以及所述优化装置相连接;
所述图像获取装置,用于获取所述转轴2的受损图像,并通过所述图像处理装置对所述受损图像进行处理与分析,基于分析结果,对所述转轴2的承压程度进行优化,具体工作过程包括:
所述图像获取装置,用于获取所述转轴2的受损图像;
所述图像处理装置,用于提取所述受损图像的多个像素,并获取所述多个像素一一对应的原始灰阶;
同时,对所述多个像素一一对应的原始灰阶进行求和加权处理,确定所述受损图像的图像权重映射图;
所述图像处理装置,还用于将所述权值映射图进行直方图均衡化处理,获取所述受损图像的处理数据;
所述控制终端,用于接收所述受损图像的处理数据,并对所述转轴2的受损图像的处理数据进行分析,获取分析结果;
同时,基于所述分析结果,控制启动所述优化装置;
所述优化装置,用于获取所述转轴2的承压数据,同时,采用梯度投影法得到优化测量矩阵;
将所述分析结果放置于所述优化测量矩阵中,并采用正交匹配追踪算法对所述转轴2的承压数据进行优化,并获取优化数据;
所述数据处理装置,用于接收所述优化数据,并对所述优化数据进行分解,获取分量数据;
同时,采用小波阈值函数对所述分量数据进行去噪处理,并采用小波变换法对所述转轴2的承压程度进行优化,获取优化模型;
所述控制终端,还用于接收所述优化模型,并将所述优化模型保存在模型库中。
上述技术方案的工作原理及有益效果是:通过图像获取装置获取转轴2的受损图像,同时,提取受损图像的多个像素,从而有利于获取多个像素一一对应的原始灰阶,并对原始图像灰阶进行求和加权处理,从而精确确定受损图像的图像权重映射图,通过图像处理装置,对图像权重映射图进行直方图均衡化处理,从而可以高效获取受损图像的处理数据,通过控制终端对处理数据进行分析,从而有利于基于分析结果控制启动优化装置,通过优化装置获取转轴2的承压数据,采用梯度投影法有利于获取优化测量矩阵,将分析结果放置于优化测量矩阵中,通过正交匹配追踪算法,有利于实现对转轴2的承压数据的优化,将优化数据进行分解,获取的分量数据通过去噪处理,并通过小波变换法对转轴2的承压程度进行优化,从而快速获取优化模型,通过控制终端,方便将优化模型保存在模型库中,有利于模型的保存,该方法大大提升了装置的准确性。
本发明提供了一种智能调节动漫制作透写台,如图8所示,还包括,红外传感器,计算机,角度检测器,报警装置;
所述红外传感器放置于所述工作台1的前侧;
所述角度检测器放置于所述支撑架3并靠近所述工作台1的左侧;
所述报警装置放置于所述工作台1的后边;
其中,所述计算机与所述红外传感器、角度检测器以及所述报警装置相连接;
所述红外传感器,用于获取目标物距离所述工作台1的距离,并通过计算机计算所述目标物的高度,通过所述高度,计算所述所述工作台1的目标角度,具体工作过程包括:
所述红外传感器,用于获取所述目标物距离所述工作台1的底部直线距离;
所述计算机,用于根据所述目标物距离所述工作台1的距离,计算所述目标物的高度;
其中,h表示所述目标物的高度,η表示所述红外传感器的灵敏度,l表示所述目标物距离所述工作台1的顶部直线距离,d表示所述目标物距离所述工作台1的底部直线距离,u表示所述红外传感器的输出电压,p表示所述红外传感器的红外辐射功率,I表示所述红外传感器的输出电流,λ表示所述红外传感器的响应波长,t表示所述红外传感器的响应时间,Δf表示所述红外传感器的带宽,v表示所述红外传感器的响应速度,lg(·)表示以10为底的对数函数;
所述计算机,用于根据所述目标物的高度,确定所述工作台1的目标角度;
其中,θ表示所述工作台1的目标角度,β表示所述电机5的工作效率,h表示所述目标物的高度,d表示所述目标物距离所述工作台1的底部直线距离,δ表示所述电机5的功率因素,log
基于所述工作台1的目标角度与所述目标物的高度,控制所述电机5以额定功率开始工作;
所述角度检测器,还用于检测所述电机5带动所述转轴2所旋转的角度是否到达所述工作台1的目标角度;
若到达所述工作台1的目标角度,所述控制终端控制所述报警装置进行报警操作,同时,控制所述电机5停止工作;
否则,所述电机5继续带动所述转轴2进行旋转,直到到达所述工作台1的目标角度。
该实施例中,目标物可以是使用者也可以是观测者。
该实施例中,报警操作可以是震动,也可以是灯光。
上述技术方案的工作原理及有益效果是:通过红外传感器获取目标物距离工作台1的底部直线距离,进而有利于通过计算目标物的高度,从而确定工作台1的目标角度,进而精确控制电机5以额定功率工作,通过角度检测器,检测电机5带动转轴2所旋转的角度是否到达工作台1的目标角度,从而确定电机5停止工作的时间,提高了角度调节的准确性,该方法大大增加了装置的精确性与智能性。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。