一种温室移动检测平台可移植导航控制系统及其控制方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及农业装备领域,特别是涉及一种温室移动检测平台可移植导航控制系统及其控制方法。
背景技术
温室信息温度、湿度等环境变量对作物生长影响极大,因此需要对作物信息监测进而实现对温室环境的控制,由于不同的温室基础路面状况差异较大,所以轮式底盘和履带式底盘都有及其广泛的温室应用前景。
工业用磁导航AGV工艺已经成熟,且能够达到很高的导航速度。但是温室环境复杂,行走路况也不像工业生产环境相对单一,这就要求用于温室信息检测的导航底盘与工业用磁导航AGV有较大差异。
就目前没有出现过两种不同结构的底盘共用一套导航控制系统,对于温室信息检测系统来说,特定的温室路况只能选择相应合适的导航底盘,即两种底盘不会同时进入同一温室进行信息检测,一种温室移动检测作业平台的通用导航控制系统有其实际的应用价值。
移动式温室作业平台是设施作业智能的关键装备,能够完成温室内的作物和环境信息的获取、植保作业以及果实采摘作业,由于温室移动作业的路况差异较大,且不同作业方式对底盘结构导航控制方式的需求不同,通常会根据作业需要选择轮胎式或者履带式的底盘,由于这两种底盘的驱动和导航转向控制方法的差异较大,通常会采用两种不同的相互独立的控制系统,这样一旦作业方式和路况改变,这不仅大幅增加了成本,同时也使得移动作业系统的通用性较差。
发明内容
本发明的目的在于提供一种温室移动检测平台可移植导航控制系统及其控制方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明采用如下技术方案:一种温室移动检测作业平台的可移植导航控制系统,其包括可编程逻辑控制器、控制箱、移动检测平台和磁条,所述移动检测平台为轮式移动底盘或履带式移动底盘,所述可编程逻辑控制器安装在所述控制箱内,所述控制箱上设有信号接口,所述可编程逻辑控制器与所述信号接口电连接,所述轮式移动底盘上设有第一安装座和第一插头,所述履带式移动底盘上设有第二安装座和第二插头,所述第一安装座和所述第二安装座皆用于安装所述控制箱,当所述第一插头与所述信号接口相连接时,所述可编程逻辑控制器识别出所述轮式移动底盘,并控制所述轮式移动底盘行驶至所述磁条,当所述第二插头与所述信号接口相连接时,所述可编程逻辑控制器识别出所述履带式移动底盘,并控制所述履带式移动底盘行驶至所述磁条。
进一步地,所述轮式移动底盘上设有第一磁导航传感器,所述第一磁导航传感器用于识别所述磁条位置,所述履带式移动底盘上设有第二磁导航传感器,所述第二磁导航传感器用于识别所述磁条位置。
进一步地,所述轮式移动底盘的底部设有转向轮,当所述第一插头与所述信号接口相连接时,所述可编程逻辑控制器读取所述第一磁导航传感器的输出数字量信号,第一磁导航传感器输出的数字量信号组成8位二进制数,每个二进制数都对应所述轮式移动底盘的下一个状态量即一个有转向轮的偏转使得所述轮式移动底盘达到下一个状态,所述可编程逻辑控制器采集二进制数,发出指令使转向轮按照预先设定的偏转角偏转。
进一步地,所述履带式移动底盘的底部设有两条可差速运动的履带,当所述第二插头与所述信号接口相连接时,所述可编程逻辑控制器读取所述第二磁导航传感器的输出数字量信号,所述第二磁导航传感器输出的数字量信号组成8位二进制数,每个8位二进制数代表所述履带式移动底盘和所述磁条的相对位置,从而控制两条履带差速运动,进而导航所述履带式移动底盘的偏转量。
一种温室移动检测作业平台的可移植导航控制系统的控制方法,其包括以下步骤:S01、将信号接口与第一插头或第二插头相接;S02、可编程逻辑控制器识别与移动检测平台为轮式移动底盘或履带式移动底盘;S03、当移动检测平台识别为轮式移动底盘时,可编程逻辑控制器读取第一磁导航传感器信号,判定当前轮式移动底盘与磁条的相对位置,可编程逻辑控制器发出模拟量信号驱动轮式移动底盘前进,可编程逻辑控制器实时读取第一磁导航传感器的输入信号,第一磁导航传感器输出的数字量信号组成8位二进制数,每个二进制数都对应轮式移动底盘的下一个状态量,可编程逻辑控制器采集二进制数,发出指令让应轮式移动底盘的轮子按照预先设定的偏转角偏转;S04、当移动检测平台识别为履带式移动底盘时,可编程逻辑控制器读取第二磁导航传感器信号,判定当前履带式移动底盘与磁条的相对位置,可编程逻辑控制器发出高频脉冲导航履带式移动底盘前进,可编程逻辑控制器实时读取第二磁导航传感器的输入信号,第二磁导航传感器输出的数字量信号组成8位二进制数,每个8位二进制数,代表履带式移动底盘和磁条的相对位置,进而决定了导航履带式移动底盘的下一个状态即导航履带式移动底盘的偏转量,直到完成履带式移动底盘到达磁条处。
进一步地,所述移动检测平台设有地标传感器,在步骤S04中,当地标传感器检测到作物时,可编程逻辑控制器发出指令,移动检测平台前进转而进行作物采摘任务。
进一步地,所述移动检测平台设有平台标志位,当所述信号接口与所述第一插头或所述第二插头相接,所述平台标志位输入所述可编程逻辑控制器,所述可编程逻辑控制器根据所述平台标志位判断所述移动检测平台为轮式移动底盘或履带式移动底盘。
本发明的有益效果为:通过所述控制箱对所述移动检测平台进行识别,使得控制箱可以适应不同的温室场景进行作业,提高了通用性,节约了成本。
附图说明
附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制。
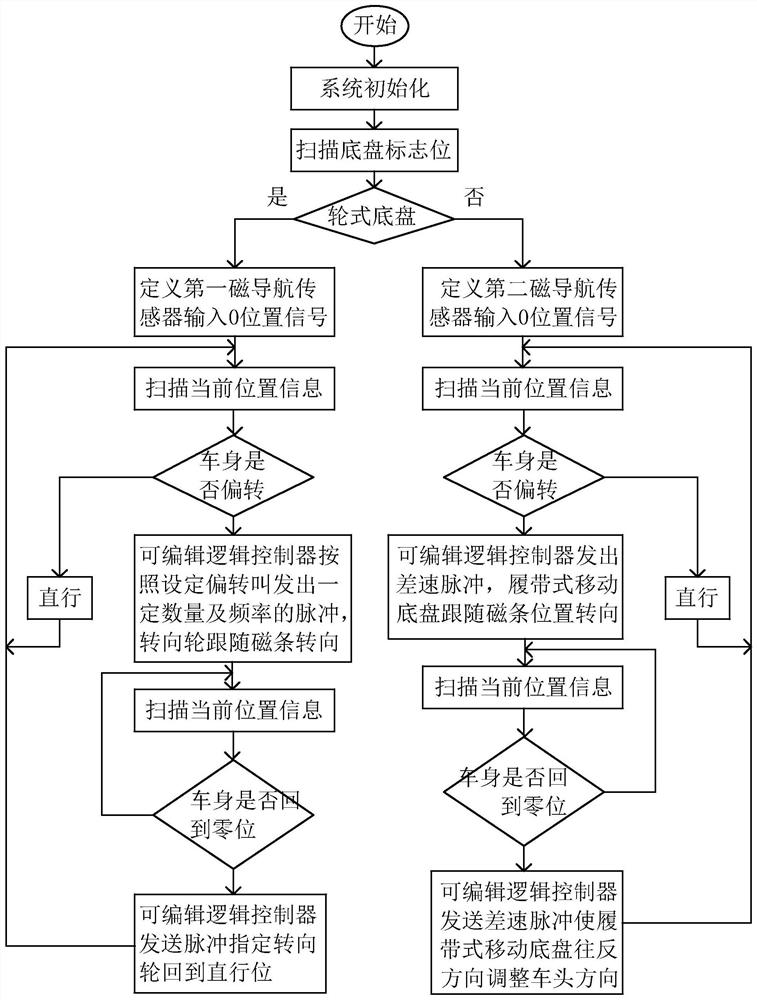
图1为本发明一实施例提供的流程图。
具体实施方式
如图1中所示,一种温室移动检测作业平台的可移植导航控制系统,其包括可编程逻辑控制器、控制箱、移动检测平台和磁条。所述移动检测平台为轮式移动底盘或履带式移动底盘,所述控制箱为可人手携带的小型箱体,所述可编程逻辑控制器安装在所述控制箱内,所述控制箱上设有信号接口,所述可编程逻辑控制器与所述信号接口通过电缆电连接,所述信号接口包括一个15针信号输入插座、一个9针信号输出插座和一个针型直流电源插座,所述轮式移动底盘上设有第一安装座和第一插头,所述履带式移动底盘上设有第二安装座和第二插头,所述第一安装座和所述第二安装座皆用于安装所述控制箱,所述第一安装座与所述控制箱可以通过螺丝相固定,所述第二安装座与所述控制箱可以通过螺丝相固定。所述第一插头对应所述信号接口设有15针信号输入插头、9针信号输出插头和一个针型直流电源插头,所述第二插头同样对应所述信号接口设有15针信号输入插头、9针信号输出插头和一个针型直流电源插头。
所述移动检测平台设有平台标志位,当所述信号接口与所述第一插头或所述第二插头相接,所述平台标志位输入所述可编程逻辑控制器,所述可编程逻辑控制器根据所述平台标志位判断所述移动检测平台为轮式移动底盘或履带式移动底盘,所述可编程逻辑控制器能够识别接入的是轮式移动底盘或者履带式移动底盘在于定义轮式移动底盘为“1”,履带式移动底盘为“0”,并作为输入信号接入15针信号输入插座。通过信号接口将所述可编程逻辑控制器与外部的移动检测平台相连,实现控制箱与控制对象之间的相对独立。在实际使用中,当需要在平坦坚实的路面上控制轮式移动底盘行走时,所述第一插头与所述信号接口相连接,所述可编程逻辑控制器即可识别出所述轮式移动底盘,并控制所述轮式移动底盘行驶至所述磁条,当需要在松软不平的路面上控制履带式移动底盘行走时,所述第二插头与所述信号接口相连接时,所述可编程逻辑控制器即可识别出所述履带式移动底盘,并控制所述履带式移动底盘行驶至所述磁条。通过所述控制箱对所述移动检测平台进行识别,使得控制箱可以适应不同的温室场景进行作业,提高了通用性,节约了成本。
所述轮式移动底盘上设有第一磁导航传感器,所述第一磁导航传感器用于识别所述磁条位置,所述轮式移动底盘可以根据所述第一磁导航传感器寻找到所述磁条的位置,方便所述可编程逻辑控制器控制所述轮式移动底盘前往磁条所在地。所述履带式移动底盘上设有第二磁导航传感器,所述第二磁导航传感器用于识别所述磁条位置,所述履带式移动底盘可以根据所述第二磁导航传感器寻找到所述磁条的位置,方便所述可编程逻辑控制器控制所述履带式移动底盘前往磁条所在地。所述轮式移动底盘的底部设有转向轮,所述轮式移动底盘由后轮直线驱动,两个前轮通过连杆连接,装有步进电机用于转向,两个前轮为转向轮。当所述第一插头与所述信号接口相连接时,所述可编程逻辑控制器读取所述第一磁导航传感器的输出数字量信号,第一磁导航传感器输出的数字量信号组成8位二进制数,每个二进制数都对应所述轮式移动底盘的下一个状态量即一个有转向轮的偏转使得所述轮式移动底盘达到下一个状态,所述可编程逻辑控制器采集二进制数,发出指令使转向轮按照预先设定的偏转角偏转。所述轮式移动底盘的转向需要辅助遮挡式限位开关实现回中位置,所述轮式移动底盘的遮挡式限位开关位置的确定,要求在转向轮连杆中心处安装挡片,所述挡片跟随所述转向轮转动,所述挡片左转进入光电开关遮挡和从右转进入遮挡光电开关后,小车前进至少20m,车身的横向位移偏差不超过20mm。
所述履带式移动底盘的底部设有两条可差速运动的履带,所述履带式移动底盘由两个伺服电机驱动,实现差速转向。当所述第二插头与所述信号接口相连接时,所述可编程逻辑控制器读取所述第二磁导航传感器的输出数字量信号,所述第二磁导航传感器输出的数字量信号组成8位二进制数,每个8位二进制数代表所述履带式移动底盘和所述磁条的相对位置,从而控制两条履带差速运动,进而导航所述履带式移动底盘的偏转量。此外,移动检测平台上搭载有信号采集机械臂,由3节直流电动推杆实现控制信号采集机械臂进行伸缩。
一种温室移动检测作业平台的可移植导航控制系统的控制方法,其包括以下步骤:将控制箱安装在移动检测平台上,将信号接口与第一插头或第二插头相接。可编程逻辑控制器识别与移动检测平台为轮式移动底盘或履带式移动底盘。当移动检测平台识别为轮式移动底盘时,可编程逻辑控制器读取第一磁导航传感器信号,判定当前轮式移动底盘与磁条的相对位置,可编程逻辑控制器发出模拟量信号驱动轮式移动底盘前进,可编程逻辑控制器实时读取第一磁导航传感器的输入信号,第一磁导航传感器输出的数字量信号组成8位二进制数,每个二进制数都对应轮式移动底盘的下一个状态量,可编程逻辑控制器采集二进制数,发出指令让应轮式移动底盘的轮子按照预先设定的偏转角偏转,当第一磁导航传感器反馈信号到轮式移动底盘的相对位置为0,也就是轮式移动底盘到达磁条时,转向轮回位到遮挡式限位开关处,移动检测平台在温室中沿预定轨道行走。
当移动检测平台识别为履带式移动底盘时,可编程逻辑控制器读取第二磁导航传感器信号,判定当前履带式移动底盘与磁条的相对位置,可编程逻辑控制器发出高频脉冲导航履带式移动底盘前进,可编程逻辑控制器实时读取第二磁导航传感器的输入信号,第二磁导航传感器输出的数字量信号组成8位二进制数,每个8位二进制数,代表履带式移动底盘和磁条的相对位置,进而决定了导航履带式移动底盘的下一个状态即导航履带式移动底盘的偏转量,直到完成履带式移动底盘到达磁条处。
所述移动检测平台设有地标传感器,在移动检测平台沿着轨道行走时,当地标传感器检测到作物时,可编程逻辑控制器发出指令,移动检测平台前进转而进行作物采摘任务。信号采集结束,移动检测平台继续沿轨道行走,直到下一个地标传感器的触发,完成检测任务,最终直到温室信息采集工作完成。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种温室移动检测平台可移植导航控制系统及其控制方法
- 一种可移动平台的制动控制方法、导航设备及可移动平台