一种基于贝叶斯深度学习的高速交通事故风险预警方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及交通事故预警方法,尤其涉及一种基于贝叶斯深度学习的高速交通事故风险预警方法。
背景技术
随着城市的发展,城市中存在越来越多的城市问题。与此同时,信息技术的不断发展,城市信息化应用水平也在不断提升,智慧城市概念得以实现。作为一种新的范例,智慧城市有望解决现有的多数城市问题,建设智慧城市在实现城市可持续发展、引领信息技术应用、提升城市综合竞争力等方面具有重要意义。目前,研究人员已经在智慧城市领域做出了很多努力,在城市交通中有实际应用,例如Ali City Brain。这些应用可提高城市交通能力,降低环境污染,提高人们的出行效率并增强交通安全,进而提高城市生活水平。
交通预测是智慧城市的关键部分。在交通预测中,这些年来已经取得了许多成就。传统上,大多数研究人员专注于分析时间特征并建立模型来预测短期交通状况。而随着交通监控设备和数据传输功能的不断发展,多维实时交通数据可以得到大规模的快速采集。通过分析多维实时交通数据,我们得以预测实时交通状况来快速更新路况信息,降低出行成本,提高出行安全。现有的技术多利用神经网络对交通数据的时间相关性进行分析,但是大多数模型无法对复杂的时间关联进行挖掘。而深度学习作为新的智能方法在复杂问题的学习上有较好的效果,大量研究人员试图利用深度学习方法解决交通问题。
事故预测是交通预测中的一个重要方向。现有工作致力于建立具有更多维度的事故影响因素模型,例如,交通上游和下游关系,以提高事故预测的准确性。但是,对于城市管理者来说,交通事故的预测无法帮助他们有效地管理交通。交通事故预测难以应用于智慧城市系统,而道路交通事故风险预警能解决这个问题。
发明内容
为解决现有技术的不足,提供一种基于贝叶斯深度学习的高速交通事故风险预警方法。本发明可实时把握城市高速道路交通安全状况,进而为城市交通管理者提供参考,提高百姓出行的安全性。
为实现上述目的,本发明采用以下技术方案:
一种基于贝叶斯深度学习的高速交通事故风险预警方法,包括以下步骤:
步骤1,从高速固定节点数据中提取各节点分钟级车辆流量、分钟级车辆平
均速度并剔除错误数据;
步骤2,以高速道路特征划分区域,并结合区域内节点的车流量和平均速度,得到区域车辆碰撞指数;
步骤3,联合步骤2所得区域车辆碰撞指数,结合带事故标签的高速交通数据集利用高斯混合模型GMM进行聚类,划分高速事故风险等级;
步骤4,将各区域内节点车流量和平均速度作为输入,利用贝叶斯深度学习提取特征,预测未来目标节点的分钟级车流量和平均速度;贝叶斯深度学习即Bayesian deeplearning,是目前广泛应用于图像学习领域的多堆叠神经网络。它本身能够提供一种不确定性,对于带错误样本的数据集和稀疏的小数据集有较好的预测效果;
步骤5,联合步骤4所预测的车流量和平均速度用步骤(2)的公式计算未来目标节点的区域车辆碰撞指数,按照步骤(3)划分的高速事故风险等级确定风险等级;
步骤6,根据风险等级,提供安全预警。
上述的一种基于贝叶斯深度学习的高速交通事故风险预警方法,所述步骤2具体包括如下步骤:
步骤2.1,依据节点位置将目标道路划分为多个区域;
步骤2.2,根据道路特征把区域划分为s*k的网格图,其中s代表单位区域内的路段数量,k代表单位区域内的车道数量;
步骤2.3,结合道路特征和区域内各个节点的车流量和平均速度计算区域车辆碰撞指数RCI,RCI的数值在0至1之间,具体公式如下:
其中i表示时间刻度,j表示区域数量,s
上述的一种基于贝叶斯深度学习的高速交通事故风险预警方法,所述步骤3具体包括如下步骤:
步骤3.1,给GMM模型设定初始参数Θ;
步骤3.2,利用EM算法对模型进行迭代,具体包括如下步骤:
步骤3.2.1,以当前参数Θ
其中X表示已观测变量集,Z表示隐变量集,Θ表示模型参数,t表示时刻。
步骤3.2.2,寻找参数最大化期望似然,具体计算公式如下:
步骤3.3,重复步骤3.2直至收敛
上述的一种基于贝叶斯深度学习的高速交通事故风险预警方法,所述步骤5具体包括如下步骤:
步骤5.1,使用贝叶斯贝叶斯深度学习训练模型,具体包含如下步骤:
步骤5.1.1,对于一个数据集S=(x
其中
步骤5.1.2,然而p(Z|S)随着变量的增多计算难度呈指数增长,因此我们使用专家知识构建类似后验概率的分布q(Z),并使用KL散度来测量两个分布之间的距离,具体计算公式如下:
KL(q(Z)||p(Z|S))=log(p(S))-ELBO,
步骤5.1.3,利用证据下界ELBO将后验概率问题转变为优化问题,具体计算公式如下:
步骤5.2,通过模型训练得到的车流量和平均速度计算区域车辆碰撞指数RCI;
步骤5.3,将计算得到的区域车辆碰撞指数匹配到GMM聚类结果中,得出风险等级。
本发明提出了区域车辆碰撞指数RCI并用于事故风险等级划分;将贝叶斯深度学习网络用于交通预测;提供了实时有效的城市交通安全预警,并可以匹配智慧城市系统。
附图说明
图1为本发明的整体流程图。
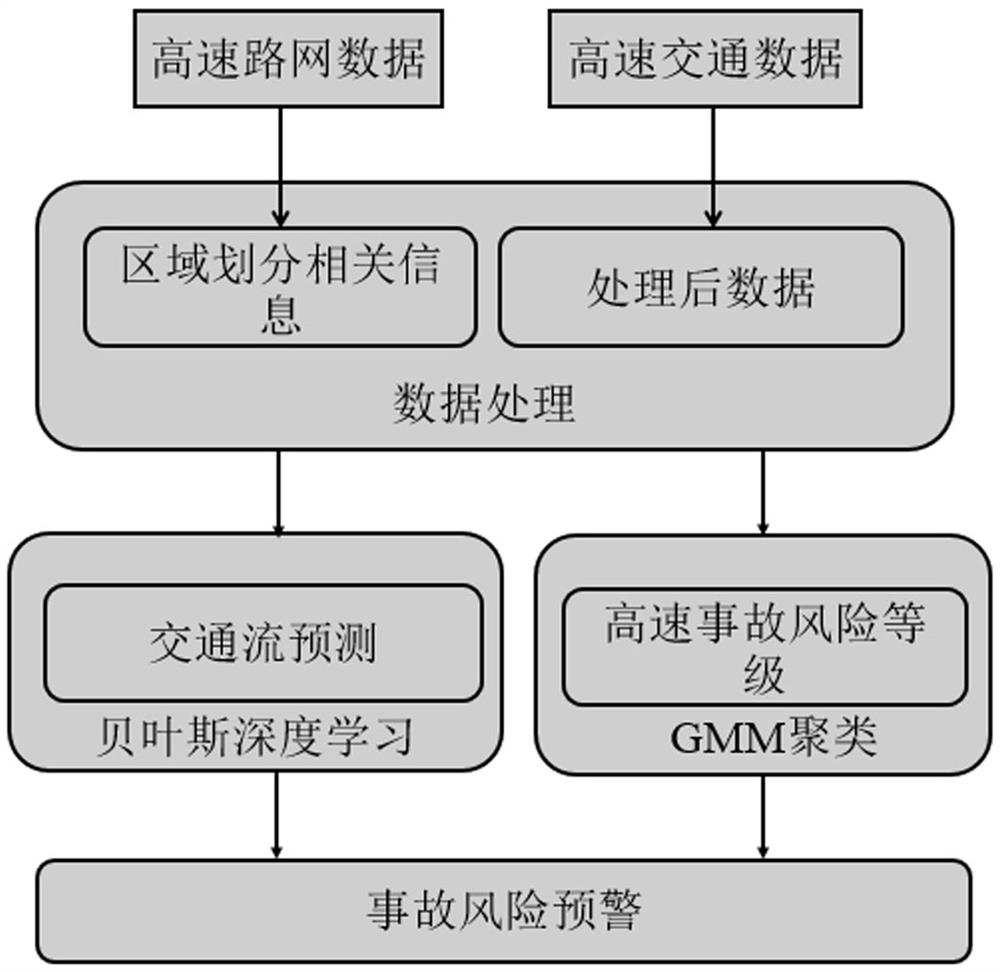
图2为本发明整体的框架图。
图3为本发明所使用的贝叶斯深度学习的模型结构图。
图4为本发明实例中模型交通流量预测效果图。
图5为本发明实例中模型交通速度预测效果图。
图6为本发明实例中事故风险预警效果图。
具体实施方式
下面结合实际高速公路部分路段的交通事故风险预警对本发明作进一步描述。
本实例中的交通事故风险预警方法整体流程如图1所示,整体框架如图2所示,具体包括以下步骤:
(1)从高速选定路段提取基于时空分布的固定站点交通流量和平均速度并进行数据清洗。
(2)以高速道路特征划分区域,并结合区域内节点的车流量和平均速度,得到区域车辆碰撞指数,具体包括如下步骤:
a)首先确定选取路段包含的固定站点数量,依据每个固定站点位置将目标道路划分为节点区域;
b)根据道路特征把区域划分为s*k的网格图,其中s代表路段数量,k代表车道数量。道路特征分为固定特征和变化特征,固定特征即道路等级、道路宽度、道路车道数、道路类型、道路水平曲率、道路垂直曲率等固有特征,变化特征即道路车流量、道路平均车速、道路车辆密度等道路根据时间产生变化的动态特征。
c)根据区域内固定站点收集的车流量和平均速度计算区域车辆碰撞指数RCI,RCI的数值在0至1之间,具体公式如下:
其中i表示时间刻度,j表示区域数量,s
(3)首先将各个站点计算的区域车辆碰撞指数按时间排序并贴上事故标签,发生事故为1,没发生为0。然后将带标签的区域车辆碰撞指数序列用GMM聚类成三个聚落,并按照聚类结果中事故分布的比例将三个聚落分别定义为高风险、正常、低风险。GMM是一种广泛使用的聚类算法。它是多个高斯分布函数的线性组合,理论上GMM可以拟合出任意类型的分布,通常用于解决同一集合下的数据包含多种不同的分布的情况。包括以下步骤:
a)给区域车辆碰撞指数序列贴上事故标签;
b)给GMM模型设定初始参数Θ;
c)利用EM算法对模型进行迭代,具体包括如下步骤:
A.以当前参数Θ
其中X表示已观测变量集,Z表示隐变量集,Θ表示模型参数。
B.寻找参数最大化期望似然,具体计算公式如下:
d)重复步骤c)直至收敛,简单来说,EM算法通过E步计算对数似然的期望值,利用M步去得到是似然期望最大化的参数值,重复E、M步直至收敛。
(4)将区域内固定站点车流量和平均速度的时间序列作为输入,利用贝叶斯深度学习训练模型,具体模型结构如图3所示,预测未来5分钟的区域车流量和平均速度,模型训练的具体过程如下:
a)对于一个数据集S=(x
其中
b)利用变分推断去推断后验概率。首先使用专家知识构建类似后验概率的分布q(Z),然后使用KL散度来测量两个分布之间的距离,具体计算公式如下:
KL(q(Z)||p(Z|S))=log(p(S))-ELBO,
其中ELBO为证据下界,包含q(Z)和p(S|Z)的联合分布,并且与后验概率相互独立,因此可以将后验概率的计算问题转化为ELBO的最优化问题。
c)反复调整输入权重分布直至ELBO优化效果最佳,即直至KL散度收敛,模型对车流量和平均速度的预测效果如图4、5所示;
(5)首先用模型预测出的区域车流量和平均速度计算区域车辆碰撞指数,然后根据区域车辆碰撞指数所划分的聚落判断道路交通事故风险并发出预警,具体效果如图6所示。
- 一种基于贝叶斯深度学习的高速交通事故风险预警方法
- 一种基于贝叶斯理论的岩爆倾向性判别及预警方法