一种文字雕刻机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及雕刻设备技术领域,具体是涉及一种文字雕刻机器人。
背景技术
近年来,机器人受到企业和科研人员的广泛关注,机械臂作为机器人的一个重要分支也成为了当前研究的热点课题。机械臂在工业、教育、医疗、航天等领域都有所应用。机械臂写字绘画在工业喷标和科普教育中有着广泛的应用空间。具有书写、雕刻功能的机器人,可以用于执行工业喷标,书法展览,卡通雕刻等任务,涉及多学科研究领域,涵盖了运动学,控制学,图像处理,图形处理以及人工智能等多学科的研究成果,且在工业,医疗,军事等行业有着很大的应用价值,是目前机器人研究领域中最热门的领域之一。现有技术中机器人在对木板雕刻文字时,无法进行自动化循环雕刻,同时,能够将雕刻产生的木屑进行回收利用。
发明内容
本发明所要解决的技术问题是提供一种文字雕刻机器人,以解决现有技术中机器人在对木板雕刻文字时,无法进行自动化循环雕刻,同时,能够将雕刻产生的木屑进行回收利用的技术问题。
为解决上述技术问题,本发明提供以下技术方案:一种文字雕刻机器人,包括工作台、弹料装置、推料装置、夹紧固定装置、机器人本体、吸木屑装置、木屑压缩装置和储存盒,所述工作台呈水平设置,所述弹料装置设置在工作台的上方,所述推料装置设置在弹料装置上,所述机器人本体设置在工作台上且位于弹料装置的侧端,所述夹紧固定装置设置在推料装置的下方,所述吸木屑装置设置在推料装置的下方,所述木屑压缩装置设置在工作台上且位于吸木屑装置的下方,所述储存盒设置在工作台上。
进一步的,所述弹料装置包括弹料支撑座、弹料U型板、弹料弹簧、弹料块、弹料伸缩柱和木板推送轨道,所述弹料支撑座设置在工作台的上方,所述弹料U型板设置弹料支撑座的侧端,所述弹料伸缩柱贯穿弹料U型板呈活动连接,所述弹料块设有若干个,若干个所述弹料块均设置在弹料U型板和弹料伸缩柱的侧端,所述弹料弹簧设有两个,两个所述弹料弹簧连接在若干个所述在弹料块上,所述木板推送轨道设置在弹料支撑座的侧端且位于弹料U型板的下方,所述木板推送轨道的内部设有凹槽。
进一步的,所述推料装置包括推料圆柱、推料电机、推料杆和推料板,所述推料圆柱设置在弹料支撑座的侧端,所述推料电机设置在推料圆柱的内部,所述推料电机的输出端贯穿弹料支撑座呈活动连接,所述推料杆的一端设置在推料电机的输出端上呈活动连接,所述推料板的一端设置在木板推送轨道的内部呈活动连接,所述推料杆的另一端位于推料板的另一端的内部呈活动连接。
进一步的,所述夹紧固定装置包括夹紧固定面板、夹紧固定不规则块、夹紧固定柱、夹紧固定气缸、夹紧固定第一杆、夹紧固定第二杆、夹紧固定块、夹紧固定第一夹和夹紧固定第二夹,所述夹紧固定面板设置在工作台上,所述夹紧固定不规则块设置在夹紧固定面板的侧端,所述夹紧固定柱的一端设置夹紧固定面板上,所述夹紧固定柱的另一端贯穿夹紧固定不规则块呈活动连接,所述夹紧固定气缸设置在夹紧固定不规则块的一侧,所述夹紧固定第一杆和夹紧固定第二杆呈对称均设置在夹紧固定不规则块的侧端,所述夹紧固定块设有两个,两个所述夹紧固定块均设置在木板推送轨道的两侧,所述夹紧固定第一夹和夹紧固定第二夹的一端呈对称均设置在夹紧固定第一杆和夹紧固定第二杆的侧端,所述夹紧固定第一夹和夹紧固定第二夹的中间位于两个所述夹紧固定块上呈活动连接,所述夹紧固定第一夹和夹紧固定第二夹的另一端均位于木板推送轨道的上方,所述夹紧固定气缸与夹紧固定不规则块的连接处设有活动销呈活动连接,所述夹紧固定第一杆和夹紧固定第二杆与夹紧固定不规则块的连接处设有活动销呈活动连接,所述夹紧固定第一杆和夹紧固定第二杆与夹紧固定第一夹和夹紧固定第二夹的连接处设有活动销呈活动连接。
进一步的,所述机器人本体的一端设置在工作台上且另一端位于木板推送轨道的下方。
进一步的,所述吸木屑装置包括吸木屑管道、吸木屑箱和吸木屑风机,所述吸木屑管道的一端设置在木板推送轨道的上方,所述吸木屑箱设置在吸木屑管道的另一端呈连通设置,所述吸木屑风机设置在吸木屑箱的内部。
进一步的,所述木屑压缩装置包括木屑压缩圆柱、木屑压缩电机、木屑压缩杆、木屑压缩伸缩杆、木屑压缩面板、木屑压缩箱体和木屑压缩门,所述木屑压缩圆柱设置在弹料支撑座的侧端,所述木屑压缩电机设置在木屑压缩圆柱的内部,所述木屑压缩杆设置在木屑压缩电机的输出端上呈活动连接,所述木屑压缩箱体设置在工作台上且位于木屑压缩圆柱的侧端,所述木屑压缩伸缩杆的一端设置在木屑压缩杆上且另一端位于木屑压缩箱体的内部,所述木屑压缩面板设置在木屑压缩伸缩杆的另一端上且位于木屑压缩箱体的内部,所述木屑压缩门设置在木屑压缩箱体的侧端。
进一步的,所述储存盒设置在工作台上且位于木板推送轨道末端的下方。
本发明与现有技术相比具有的有益效果是:
其一,本发明通过人工将所需雕刻的木板放置到弹料U型板内后,这时弹料弹簧处于紧绷状态,当推料装置运行将木板推送走后,弹料弹簧回弹将木板进行向下移动,进行下一次作业,从而实现循环作业。
其二,本发明通过推料电机运行带动推料电机输出端上的推料杆进行转动,推料杆转动带动推料板在木板推送轨道内部进行左右移动,从而实现将所需雕刻的木板进行推送到机器人本体的下方进行雕刻作业,通过推料电机每次的运行幅度相同,从而能够准确的使木板每次被推送的距离一致,从而更好的将木板进行夹紧固定和进行雕刻作业,有效的保证了雕刻的精确性。
其三,本发明当所需雕刻的木板被推送到雕刻位置时,通过夹紧固定气缸运行带动夹紧固定不规则块进行转动,夹紧固定不规则块转动带动夹紧固定第一杆和夹紧固定第二杆呈反方向进行转动,夹紧固定第一杆和夹紧固定第二杆转动带动夹紧固定第一夹和夹紧固定第二夹在夹紧固定块上进行转动,从而实现对所需雕刻的木板进行固定和松开。
其四,本发明当机器人本体在对木板进行雕刻时,通过吸木屑风机运行将雕刻时掉落的木屑进行通过吸木屑管道吸入的吸木屑箱内,并且排入木屑压缩装置的内部进行下一步处理。
其五,本发明当雕刻产生的木屑被吸入的木屑压缩箱体内部后,通过木屑压缩电机运行带动木屑压缩电机输出端上的木屑压缩杆转动,木屑压缩杆转动带动木屑压缩伸缩杆在木屑压缩箱体的内部进行移动,木屑压缩伸缩杆移动带动木屑压缩面板在木屑压缩箱体的内部进行移动,从而实现将被吸入的木屑进行压缩,当将木屑压缩完成后,通过人工将木屑压缩门打开取出即可,省时省力,结构简单,可进行回收循环利用。
附图说明
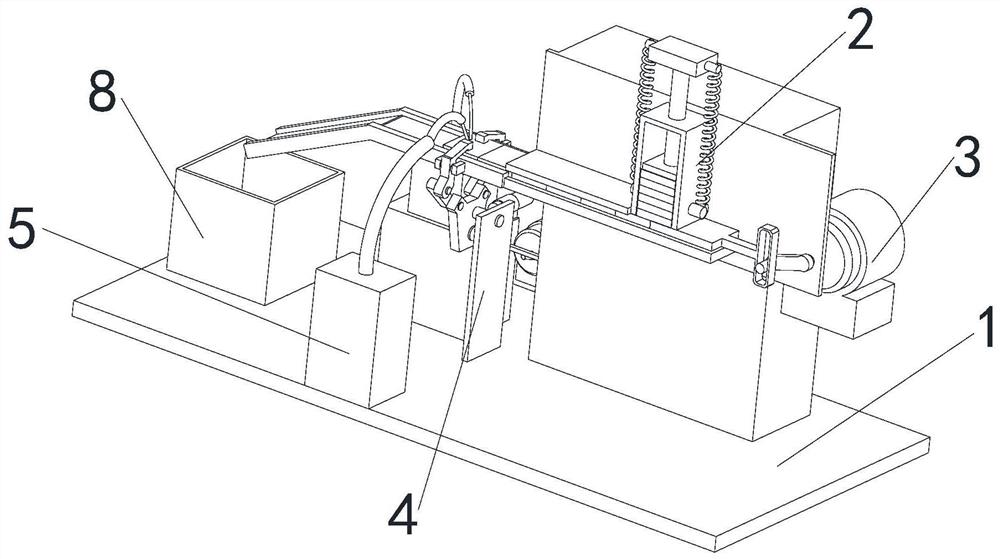
图1为本发明的第一角度立体结构示意图;
图2为本发明的第二角度立体结构示意图;
图3为本发明的弹料装置立体结构示意图;
图4为本发明的推料装置立体结构示意图;
图5为本发明的弹料装置和推料装置立体结构示意图;
图6为本发明的夹紧固定装置立体结构示意图;
图7为本发明的机器人本体和吸木屑装置立体结构示意图;
图8为本发明的木屑压缩装置立体结构示意图;
图9为本发明的部分装置立体结构示意图。
图中标号为:
工作台1、弹料装置2、弹料支撑座21、弹料U型板22、弹料弹簧23、弹料块24、弹料伸缩柱25、木板推送轨道26、推料装置3、推料圆柱31、推料电机32、推料杆33、推料板34、夹紧固定装置4、夹紧固定面板41、夹紧固定不规则块42、夹紧固定柱43、夹紧固定气缸44、夹紧固定第一杆45、夹紧固定第二杆46、夹紧固定块47、夹紧固定第一夹48、夹紧固定第二夹49、机器人本体5、吸木屑装置6、木屑管道61、吸木屑箱62、吸木屑风机63、木屑压缩装置7、木屑压缩圆柱71、木屑压缩电机72、木屑压缩杆73、木屑压缩伸缩杆74、木屑压缩面板75、木屑压缩箱体76、木屑压缩门77、储存盒8。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参照图1至图9可知,本发明提供了一种文字雕刻机器人,包括工作台1、弹料装置2、推料装置3、夹紧固定装置4、机器人本体5、吸木屑装置6、木屑压缩装置7和储存盒8,所述工作台1呈水平设置,所述弹料装置2设置在工作台1的上方,所述推料装置3设置在弹料装置2上,所述机器人本体5设置在工作台1上且位于弹料装置2的侧端,所述夹紧固定装置4设置在推料装置3的下方,所述吸木屑装置6设置在推料装置3的下方,所述木屑压缩装置7设置在工作台1上且位于吸木屑装置6的下方,所述储存盒8设置在工作台1上。
所述弹料装置2包括弹料支撑座21、弹料U型板22、弹料弹簧23、弹料块24、弹料伸缩柱25和木板推送轨道26,所述弹料支撑座21设置在工作台1的上方,所述弹料U型板22设置弹料支撑座21的侧端,所述弹料伸缩柱25贯穿弹料U型板22呈活动连接,所述弹料块24设有若干个,若干个所述弹料块24均设置在弹料U型板22和弹料伸缩柱25的侧端,所述弹料弹簧23设有两个,两个所述弹料弹簧23连接在若干个所述在弹料块24上,所述木板推送轨道26设置在弹料支撑座21的侧端且位于弹料U型板22的下方,所述木板推送轨道26的内部设有凹槽,通过人工将所需雕刻的木板放置到弹料U型板22内后,这时弹料弹簧23处于紧绷状态,当推料装置3运行将木板推送走后,弹料弹簧23回弹将木板进行向下移动,进行下一次作业,从而实现循环作业。
所述推料装置3包括推料圆柱31、推料电机32、推料杆33和推料板34,所述推料圆柱31设置在弹料支撑座21的侧端,所述推料电机32设置在推料圆柱31的内部,所述推料电机32的输出端贯穿弹料支撑座21呈活动连接,所述推料杆33的一端设置在推料电机32的输出端上呈活动连接,所述推料板34的一端设置在木板推送轨道26的内部呈活动连接,所述推料杆33的另一端位于推料板34的另一端的内部呈活动连接,通过推料电机32运行带动推料电机32输出端上的推料杆33进行转动,推料杆33转动带动推料板34在木板推送轨道26内部进行左右移动,从而实现将所需雕刻的木板进行推送到机器人本体5的下方进行雕刻作业,通过推料电机32每次的运行幅度相同,从而能够准确的使木板每次被推送的距离一致,从而更好的将木板进行夹紧固定和进行雕刻作业,有效的保证了雕刻的精确性。
所述夹紧固定装置4包括夹紧固定面板41、夹紧固定不规则块42、夹紧固定柱43、夹紧固定气缸44、夹紧固定第一杆45、夹紧固定第二杆46、夹紧固定块47、夹紧固定第一夹48和夹紧固定第二夹49,所述夹紧固定面板41设置在工作台1上,所述夹紧固定不规则块42设置在夹紧固定面板41的侧端,所述夹紧固定柱43的一端设置夹紧固定面板41上,所述夹紧固定柱43的另一端贯穿夹紧固定不规则块42呈活动连接,所述夹紧固定气缸44设置在夹紧固定不规则块42的一侧,所述夹紧固定第一杆45和夹紧固定第二杆46呈对称均设置在夹紧固定不规则块42的侧端,所述夹紧固定块47设有两个,两个所述夹紧固定块47均设置在木板推送轨道26的两侧,所述夹紧固定第一夹48和夹紧固定第二夹49的一端呈对称均设置在夹紧固定第一杆45和夹紧固定第二杆46的侧端,所述夹紧固定第一夹48和夹紧固定第二夹49的中间位于两个所述夹紧固定块47上呈活动连接,所述夹紧固定第一夹48和夹紧固定第二夹49的另一端均位于木板推送轨道26的上方,所述夹紧固定气缸44与夹紧固定不规则块42的连接处设有活动销呈活动连接,所述夹紧固定第一杆45和夹紧固定第二杆46与夹紧固定不规则块42的连接处设有活动销呈活动连接,所述夹紧固定第一杆45和夹紧固定第二杆46与夹紧固定第一夹48和夹紧固定第二夹49的连接处设有活动销呈活动连接,当所需雕刻的木板被推送到雕刻位置时,通过夹紧固定气缸44运行带动夹紧固定不规则块42进行转动,夹紧固定不规则块42转动带动夹紧固定第一杆45和夹紧固定第二杆46呈反方向进行转动,夹紧固定第一杆45和夹紧固定第二杆46转动带动夹紧固定第一夹48和夹紧固定第二夹49在夹紧固定块47上进行转动,从而实现对所需雕刻的木板进行固定和松开。
所述机器人本体5的一端设置在工作台1上且另一端位于木板推送轨道26的下方,当夹紧固定装置4运行对所需雕刻的木板进行固定后,通过设置的机器人本体5能够对木板进行自动雕刻所需文字。
所述吸木屑装置6包括吸木屑管道61、吸木屑箱62和吸木屑风机63,所述吸木屑管道61的一端设置在木板推送轨道26的上方,所述吸木屑箱62设置在吸木屑管道61的另一端呈连通设置,所述吸木屑风机63设置在吸木屑箱62的内部,当机器人本体5在对木板进行雕刻时,通过吸木屑风机63运行将雕刻时掉落的木屑进行通过吸木屑管道61吸入的吸木屑箱62内,并且排入木屑压缩装置7的内部进行下一步处理。
所述木屑压缩装置7包括木屑压缩圆柱71、木屑压缩电机72、木屑压缩杆73、木屑压缩伸缩杆74、木屑压缩面板75、木屑压缩箱体76和木屑压缩门77,所述木屑压缩圆柱71设置在弹料支撑座21的侧端,所述木屑压缩电机72设置在木屑压缩圆柱71的内部,所述木屑压缩杆73设置在木屑压缩电机72的输出端上呈活动连接,所述木屑压缩箱体76设置在工作台1上且位于木屑压缩圆柱71的侧端,所述木屑压缩伸缩杆74的一端设置在木屑压缩杆73上且另一端位于木屑压缩箱体76的内部,所述木屑压缩面板75设置在木屑压缩伸缩杆74的另一端上且位于木屑压缩箱体76的内部,所述木屑压缩门77设置在木屑压缩箱体76的侧端,当雕刻产生的木屑被吸入的木屑压缩箱体76内部后,通过木屑压缩电机72运行带动木屑压缩电机72输出端上的木屑压缩杆73转动,木屑压缩杆73转动带动木屑压缩伸缩杆74在木屑压缩箱体76的内部进行移动,木屑压缩伸缩杆74移动带动木屑压缩面板75在木屑压缩箱体76的内部进行移动,从而实现将被吸入的木屑进行压缩,当将木屑压缩完成后,通过人工将木屑压缩门77打开取出即可,省时省力,结构简单,可进行回收循环利用。
所述储存盒8设置在工作台1上且位于木板推送轨道26末端的下方,当木板被雕刻完成后,通过推料电机32运行将雕刻完成的木板推送到储存盒8内进行储存。
本发明的工作原理:通过人工将所需雕刻的木板放置到弹料U型板22内后,这时弹料弹簧23处于紧绷状态,当推料装置3运行将木板推送走后,弹料弹簧23回弹将木板进行向下移动,进行下一次作业,从而实现循环作业,通过推料电机32运行带动推料电机32输出端上的推料杆33进行转动,推料杆33转动带动推料板34在木板推送轨道26内部进行左右移动,从而实现将所需雕刻的木板进行推送到机器人本体5的下方进行雕刻作业,通过推料电机32每次的运行幅度相同,从而能够准确的使木板每次被推送的距离一致,从而更好的将木板进行夹紧固定和进行雕刻作业,有效的保证了雕刻的精确性,当所需雕刻的木板被推送到雕刻位置时,通过夹紧固定气缸44运行带动夹紧固定不规则块42进行转动,夹紧固定不规则块42转动带动夹紧固定第一杆45和夹紧固定第二杆46呈反方向进行转动,夹紧固定第一杆45和夹紧固定第二杆46转动带动夹紧固定第一夹48和夹紧固定第二夹49在夹紧固定块47上进行转动,从而实现对所需雕刻的木板进行固定和松开,当夹紧固定装置4运行对所需雕刻的木板进行固定后,通过设置的机器人本体5能够对木板进行自动雕刻所需文字,当雕刻产生的木屑被吸入的木屑压缩箱体76内部后,通过木屑压缩电机72运行带动木屑压缩电机72输出端上的木屑压缩杆73转动,木屑压缩杆73转动带动木屑压缩伸缩杆74在木屑压缩箱体76的内部进行移动,木屑压缩伸缩杆74移动带动木屑压缩面板75在木屑压缩箱体76的内部进行移动,从而实现将被吸入的木屑进行压缩,当将木屑压缩完成后,通过人工将木屑压缩门77打开取出即可,省时省力,结构简单,可进行回收循环利用,当木板被雕刻完成后,通过推料电机32运行将雕刻完成的木板推送到储存盒8内进行储存。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。