一种基于算法融合的无人驾驶车辆避碰路径规划方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及无人驾驶领域,具体的说是一种基于算法融合的无人驾驶车辆避碰路径规划方法。
背景技术
车辆的避障路径规划问题一直是汽车无人驾驶研究的重点。随着社会的发展,车辆的不断增加,车辆所面临的交通环境也变得更加复杂,在复杂未知的环境中规划安全可靠、鲁棒性强的行驶路径成汽车无人驾驶领域的主要研究方向。
发明内容
本发明旨在提供一种基于算法融合的无人驾驶车辆避碰路径规划方法,对复杂且未知环境下的车辆避碰路径规划,使车辆能够在顺利躲避障碍物的前提下快速高效的抵达目标位置。
为了解决以上技术问题,本发明采用的具体方案为:一种基于算法融合的无人驾驶车辆避碰路径规划方法,通过人工势场算法实时计算障碍物对于车辆的斥力作用和目标点对于车辆的引力作用以得到车辆所收到的合力,根据合力计算得到控制车辆转向和速度的实时控制因素,通过实时控制因素控制车辆朝向目标点移动;在车辆陷入局部极小值状态时利用算法融合,采用BUG算法使车辆跟踪障碍物的轮廓并围绕障碍物边界移动,直到脱离局部极小值状态,之后再继续利用人工势场算法引导车辆向着目标点移动。
优选的,包括以下步骤:
S1:检测目标点和车辆当前位置是否位于地图的可行区域内,如不在可行区域内则停止,如在可行区域内则进行下一步;
S2:分别计算车辆正前方、左方、右方、左前方、右前方距离障碍物的距离,将数据传入人工势场算法中,获得障碍物在势场中对车辆产生的斥力作用;计算车辆初始位置与目标点的距离和角度,然后将距离数据和角度数据传入人工势场算法中,用于获得目标点在势场中对车辆产生得引力作用;由斥力作用和引力作用计算车辆所受合力的大小及方向,并得到车辆的转向及速度以引导车辆朝向目标点移动,在移动过程中计算下一时刻车辆的新位置,程序循环执行;
S3:在车辆移动过程中实时判断车辆是否陷入局部极小值状态;当车辆陷入局部极小值时,则融合BUG算法,使车辆跟踪障碍物的轮廓,围绕障碍物边界移动,直到脱离局部极小值,之后再继续利用人工势场算法引导车辆向着目标点移动。
优选的,在车辆移动过程中车辆的坐标位置为:
x=x
y=y
其中θ为车辆受合力作用的旋转角度;dx是车辆相对于地图在X方向上单位时间内前进的位移值;dy是车辆相对于地图在Y方向单位时间内前进的位移值;dt是每次前进的时间间隔。
优选的,车辆所受目标点的引力作用函数为:
其中,k
车辆所受障碍物的斥力作用函数为:
其中,ρ(q,q
车辆受到的合力为:F=F
优选的,判断车辆陷入局部极小值的标准为:
ε是一个很小的正数,其含义是车辆受到的虚拟合力接近0。
本发明使车辆能够根据与障碍物和目标点的距离计算车辆在势场环境中收到的合力及其运动方向,并及时有效的规划行驶路劲,使车辆在顺利躲避障碍物的前提下快速高效的抵达目标位置,并具有以下有益效果:
(1)车辆的避障效果明显,采用人工势场可以使的车辆快速规划出一条安全可靠鲁棒性强的无碰撞路径,其实现简单,代码效率高。
(2)当车辆受力平衡达到局部极小值时,引入BUG算法,规划高精度的行驶路径,沿障碍物轮廓绕行,直到脱离局部极小值,之后再利用人工势场算法向着目标点快速高效的规划行驶路经。
附图说明
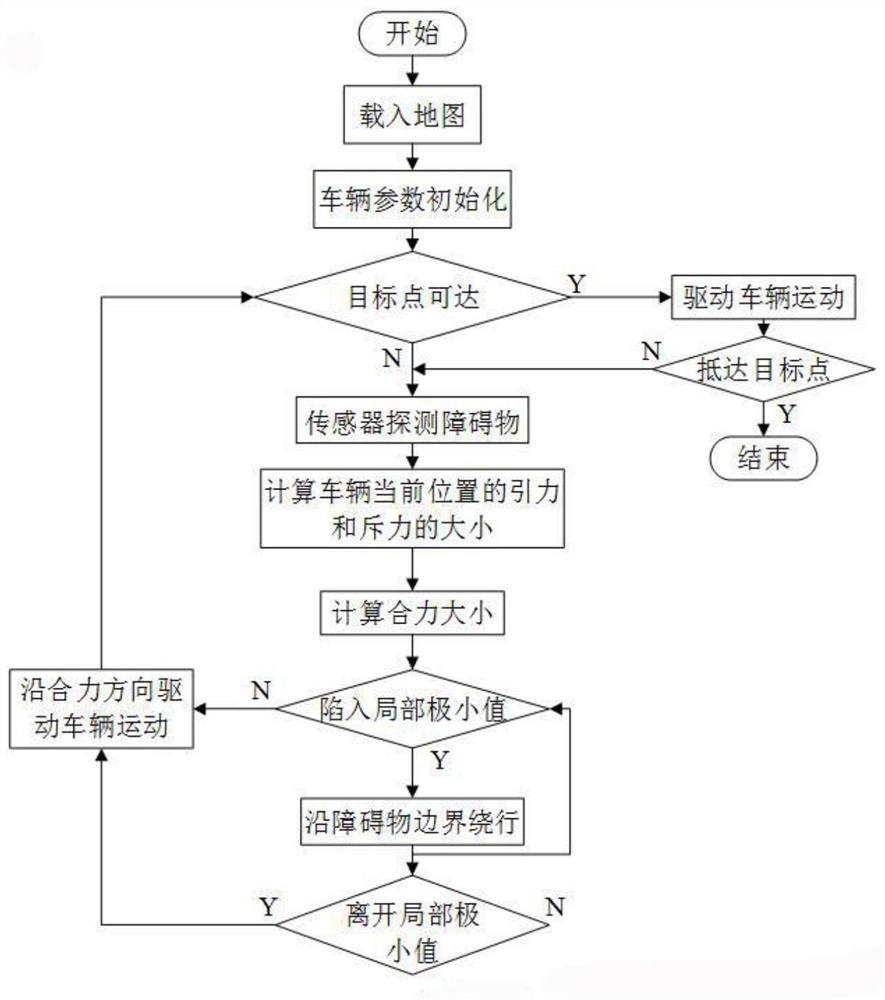
图1为本发明的程序流程图;
图2为车辆陷入局部极小值时的路径示意图;
图3为车辆利用BUG算法规划行驶的路径示意图
图4为车辆在复杂环境中的避障路径示意图;
图5为车辆在复杂环境中的避障路径仿真图。
具体实施方式
本发明的一种基于算法融合的无人驾驶车辆避碰路径规划方法,通过人工势场算法实时计算障碍物对于车辆的斥力作用和目标点对于车辆的引力作用以得到车辆所收到的合力,根据合力计算得到控制车辆转向和速度的实时控制因素,通过实时控制因素控制车辆朝向目标点移动;在车辆陷入局部极小值状态时利用算法融合,采用BUG算法使车辆跟踪障碍物的轮廓并围绕障碍物边界移动,直到脱离局部极小值状态,之后再继续利用人工势场算法引导车辆向着目标点移动。
具体的,如图1所示本发明的方法包括以下步骤:
S1:载入地图,并初始化车辆的各种参数,比如:起始点的位置x(50,50),目标点的位置x(450,450),初始方向、物理尺寸、斥力影响范围、引力比例因子、斥力比例因子、安全距离范围等。检测目标点和车辆当前位置是否位于地图的可行区域内,如不在可行区域内则停止,并显示目标点和车辆的起始位置不在地图上,取消路径规划;如在可行区域内则进行下一步;
S2:先利用车辆的传感器计算出车辆与障碍物之间的距离,分别计算车辆正前方、左方、右方、左前方、右前方距离障碍物的距离,将五个方向上的测量距离与障碍物的斥力影响范围作对比,判断该方向是否受到障碍物的斥力影响,并设计人工势场法的数学模型,将车辆在五个方向上与障碍物的距离信息和角度信息传入人工势场算法的数学模型中,计算出斥力的矢量大小与方向;同样测量出车辆与目标点之间的距离和角度,计算出引力的矢量大小与方向;最终得到整个合力的大小与方向。再根据合力的大小与方向,计算车辆下一步的前进方向、前进速度、前进距离,得到车辆下一步的位置信息,并检测是否抵达目标点。
S3:根据车辆受到的总势能的大小判断车辆是否陷入局部极小值状态。若车辆没有陷入局部极小值状态,则将车辆下一步的位置信息返回到程序中,继续循环求取下下一步的位置信息,并继续对比判断车辆的是否抵达目标点或陷入局部极小值状态;若车辆抵达目标点,则程序结束,停止运行;利用合力是否趋近与零来判断车辆是否陷入局部极小值状态,若车辆陷入局部极小值状态,则调整车辆位置,将其移动到Bug算法的主线上,期间如果再次遇到障碍物则使用Bug算法,沿着障碍物边界绕行移动,如果没有,则继续向着主线移动,直到移动到主线上,当利用Bug算法逃离局部极小值区域,先判断是否脱离局部极小值区域,若确定脱离局部极小值后则继续利用人工势场算法规划路径直到行驶至目标位置。
车辆的路径规划设计主要将人工势场算法与BUG算法融合得到行驶轨迹,在人工势场算法中,势场是对车辆运行环境的人为抽象描述,构造基于目标引力与障碍斥力的势场模型,使得车辆在势场中根据环境势能差进行滑动,其轨迹是势场中沿势函数下降的方向曲线。其中,势函数的形式不是固定不变的,往往是根据需要设定的,势函数应该满足连续、可导等一般势场所具有的性质。
当车辆离目标点比较远时,引力将变的特别大,相对较小的斥力在甚至可以忽略的情况下,车辆在运动的过程中可能会碰到障碍物。此时我们可以通过采用修正引力函数的方法,以避免距离过大而导致的引力过大,对引力势函数加以限定范围则如上述提到的势场函数所示。
障碍物在人工势场环境中的斥力影响范围有一定的阈值,如果超过该距离影响范围则对车辆没有斥力影响,根据车辆在五个方向上与障碍物之间的距离,计算车辆所受的斥力影响,对应的斥力势函数则如上述提到的势场函数所示。
当车辆陷入局部极小值时,利用BUG算法引导车辆脱离局部极小值,主要根据主线设定车辆行驶路径的大致移动位置,并根据障碍物在环境中的位置信息编写程序使车辆沿着障碍物的轮廓绕行,高精度的规划车辆的行驶路径。等到脱离局部极小值后再根据势场函数引导车辆向着目标位置移动。
在车辆移动过程中车辆的坐标位置为:
x=x
y=y
其中θ为车辆受合力作用的旋转角度;dx是车辆相对于地图在X方向上单位时间内前进的位移值;dy是车辆相对于地图在Y方向单位时间内前进的位移值;dt是每次前进的时间间隔。
上述车辆所受目标点的引力作用函数为:
其中,k
车辆所受障碍物的斥力作用函数为:
其中,ρ(q,q
上述车辆受到的合力为:F=F
上述判断车辆陷入局部极小值的标准为:
ε是一个很小的正数,其含义是车辆受到的虚拟合力接近0。
- 一种基于算法融合的无人驾驶车辆避碰路径规划方法
- 一种基于蚁群算法和遗传算法融合的配送中心拣货路径规划方法