车辆
文献发布时间:2023-06-19 13:30:50
技术领域
本发明涉及车辆。
背景技术
在专利文献1中公开了识别存在于本车辆的周围的其他车辆而自动地进行行车线变更的车辆。
在先技术文献
专利文献
专利文献1:日本特开2019-137139号公报
发明内容
发明要解决的课题
在能够自动地进行行车线变更的车辆的情况下,若不清楚何时实施行车线变更、或者要在行车线变更目标的行驶车道的哪个位置实施行车线变更,则驾驶员有可能感到不安。
本发明是着眼于这样的问题点而完成的,其目的在于,驾驶员能够容易地掌握何时实施行车线变更或者要在行车线变更目标的行驶车道的哪个位置实施行车线变更。
用于解决课题的手段
为了解决上述课题,根据本发明的一个方式,能够自动地进行行车线变更的车辆具备:物体识别装置,构成为识别存在于本车辆的周围的其他车辆,并且计算其他车辆的相对位置;以及显示装置,用于显示向本车辆的乘员提供的信息。显示装置构成为,与本车辆一起,在由物体识别装置计算出的相对位置显示其他车辆,在有自动的行车线变更的实施预定时,在实施行车线变更目标的行驶车道的行车线变更的预定的空间显示表示预定实施行车线变更的标记,在行车线变更目标的行驶车道存在对行车线变更造成影响的所述其他车辆时,根据其他车辆的相对位置,使标记的位置变化。
发明效果
根据本发明的该方式,由于能够与其他车辆一起在行车线变更的实施预定空间显示标记,并使该标记的位置根据其他车辆的相对位置而按时间序列变化,因此驾驶员能够容易地掌握何时实施行车线变更或者要在行车线变更目标的行驶车道的哪个位置实施行车线变更。
附图说明
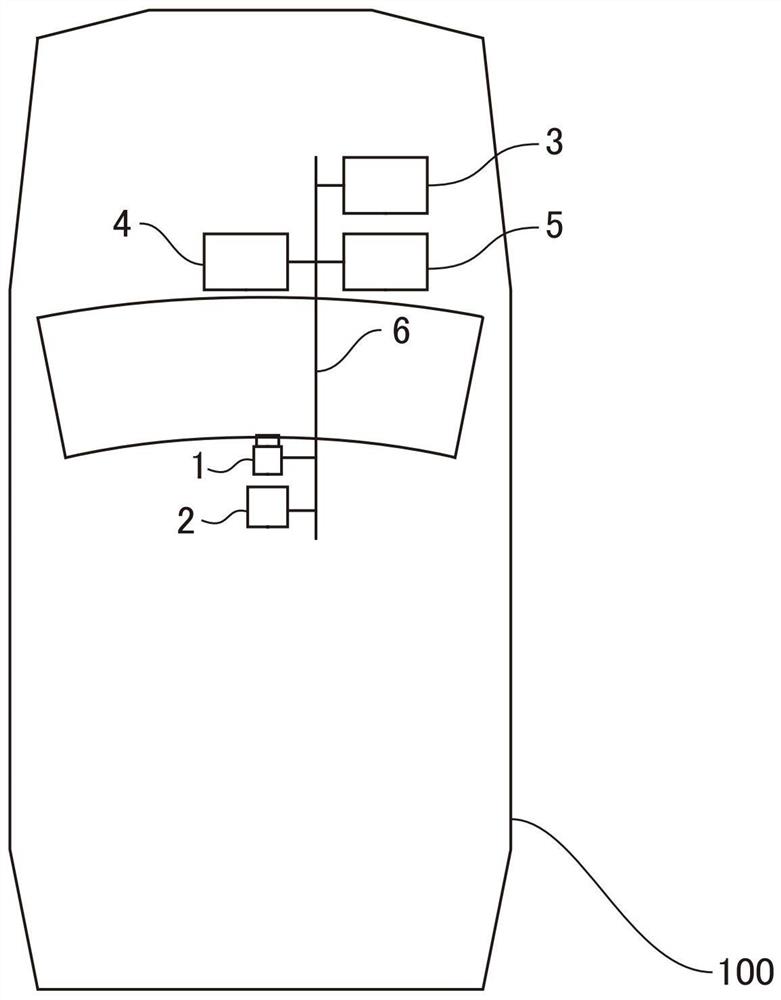
图1是具备本发明的一个实施方式的显示装置的车辆的系统概略图。
图2是对测距传感器的动作进行说明的图。
图3是表示将存在于车辆的周围的其他车辆与车辆一起显示于信息显示画面的情况的一例的图。
图4是表示本发明的一个实施方式的显示装置的硬件结构的图。
图5是对本发明的一个实施方式的显示处理进行说明的流程图。
图6是对行车线变更标记的具体的显示方法进行说明的图。
图7是对行车线变更标记的具体的显示方法进行说明的图。
具体实施方式
以下,参照附图对本发明的实施方式进行详细说明。另外,在以下的说明中,对相同的构成要素标注相同的参照标号。
图1是具备本发明的一个实施方式的显示装置4的车辆100的系统概略图。
车辆100具备相机1、测距传感器2、物体识别装置3、显示装置4以及车辆控制装置5。相机1、测距传感器2、物体识别装置3、显示装置4以及车辆控制装置5分别经由车内网络6以能够通信的方式连接,所述车内网络6遵照控制器区域网络这样的标准。
相机1以朝向车辆100的前方的方式安装于例如车辆100的车厢内,以规定的帧率(例如,10[Hz]~40[Hz])拍摄车辆100的前方区域,生成拍摄到的该前方区域的图像(以下称为“相机图像”)。然后,每当生成相机图像时,相机1将生成的相机图像经由车内网络6发送到车辆控制装置5。
如图2(A)所示,测距传感器2对车辆100的周围的测距区域,水平且平行地照射使照射角度不同的多条激光或电波,并接收所照射的各激光的反射光或所照射的各电波的反射波。而且,测距传感器2基于接收到的反射光或反射波,测量到存在于测距区域内的道路、障碍物(例如建筑物、道路上的先行车或后续车、相向车这样的行驶车辆、停止车辆、路缘石、坠物以及行人等)的距离。如图2(B)所示,按每个激光或电波的反射点(照射点)分别取得到该道路、障碍物的距离,测距传感器2在将到各反射点的距离和各反射点的坐标信息建立对应关系的基础上,将它们作为测距数据经由车内网络6发送到物体识别装置3。
作为照射激光的测距传感器2,例如可举出雷达(LiDAR;Light Detection AndRanging)。另外,作为照射电波的测距传感器2,例如可举出毫米波雷达传感器。在本实施方式中,如图2(A)所示,作为测距传感器2使用安装于车辆100的车顶的雷达。
物体识别装置3基于测距数据,识别存在于车辆100的周围的其他车辆,并且经由车内网络6向显示装置4以及车辆控制装置5发送与识别出的其他车辆相关的信息(以下称为“其他车辆信息”)。具体而言,物体识别装置3将基于所照射的激光等的反射波而检测出的多个反射点中的、满足规定的条件的反射点作为从同一物体反射的激光等的反射点而进行分组,由此识别存在于车辆100的周围的其他车辆。另外,在以下的说明中,为了明确地区分车辆100和存在于该车辆100的周围的其他车辆,有时根据需要将车辆100称为本车辆100。
显示装置4具备配置于车辆100的驾驶员能够视觉确认的位置的信息显示画面44(参照图4)。信息显示画面44例如是液晶显示器或有机EL显示器等各种显示器。从物体识别装置3发送来的其他车辆信息中包含各其他车辆的类别信息(乘用车、卡车、二轮车等)、以车辆100为基准的情况下的各其他车辆的位置信息(相对位置信息)、以及先行车辆信息等,该先行车辆信息是关于在车辆100的前方且与车辆100相同的行车线上行驶的其他车辆(以下称为“先行车辆”)的有无、与先行车辆的车间距离的信息。本实施方式的显示装置4基于该其他车辆信息,例如如图3所示,将存在于车辆100的周围的其他车辆与车辆100一起显示于信息显示画面44。具体而言,如图3所示,若其他车辆为乘用车,则显示装置4将规定的乘用车用的图标显示于该其他车辆的相对位置。同样地,如果其他车辆是卡车,则将规定的卡车用的图标显示于该其他车辆的相对位置,虽然未图示,但如果其他车辆是二轮车,则将规定的二轮车用的图标显示于该其他车辆的相对位置。
在车辆控制装置5中,除了前述的相机图像、其他车辆信息之外,还输入用于实施自动地进行与加速、转向以及制动相关的驾驶操作的一部分或者全部的驾驶辅助所需的各种信息(例如,驾驶员的外观信息、车辆100的当前位置信息、车速信息等)。而且,车辆控制装置5基于这些信息来制作车辆100的驾驶计划,并按照该驾驶计划自动地进行与加速、转向以及制动相关的驾驶操作的一部分或者全部。另外,在本实施方式中,车辆控制装置5经由车内网络6向显示装置4发送与所制作的驾驶计划相关的信息(以下称为“驾驶计划信息”)。
图4是表示显示装置4的硬件结构的图。
如图4所示,显示装置4具备通信接口41、存储部42、处理部43以及信息显示画面44。
通信接口41具备用于将显示装置4与车内网络6连接的接口电路。即通信接口41经由车内网络6与物体识别装置3连接。通信接口41每当从物体识别装置3接收其他车辆信息时,将接收到的其他车辆信息交给处理部43。
存储部42具有HDD(Hard Disk Drive:硬盘驱动器)、光记录介质、半导体存储器等存储介质,存储处理部43进行的处理中使用的各种计算机程序、数据等。
处理部43具有一个或多个处理器及其周边电路。处理部43执行存储于存储部42的各种计算机程序,统一控制显示装置4的整体的动作,例如是CPU(Central ProcessingUnit:中央处理单元)。处理部43基于经由通信接口41接收到的其他车辆信息以及驾驶计划信息,执行显示处理,该显示处理用于将与存在于车辆100的周围的其他车辆、行车线变更相关的信息等各种信息显示于信息显示画面44。关于该显示处理的详细情况,参照图5在后面叙述。
如上所述,信息显示画面44例如是液晶显示器或有机EL显示器等各种显示器,配置在车辆100的驾驶员能够视觉确认的位置,显示与从处理部43输出的信号相应的信息(例如文字信息、图像信息)。
另外,虽然未图示物体识别装置3以及车辆控制装置5的硬件结构,但与显示装置4同样地,具备通信接口、存储部以及处理部。
在此,在本实施方式中,如图3所示,通过显示装置4使在车辆侧掌握的存在于本车辆100的周围的其他车辆、即由物体识别装置3识别出的存在于本车辆100的周围的其他车辆显示于信息显示画面44。这样,向驾驶员公开由车辆控制装置5进行的驾驶辅助中在车辆侧掌握的信息,由此例如驾驶员能够判断车辆侧所掌握的信息是否正确等,因此能够给驾驶员带来安心感。
另一方面,在车辆控制装置5的驾驶辅助中,在超车时、合流时、分流时等,有时会自动地进行行车线变更,但若不清楚何时实施行车线变更或者要在行车线变更目标的行驶车道的哪个位置实施行车线变更,则特别是在本车辆100的周围存在其他车辆的情况下,驾驶员有可能感到不安。
因此,在本实施方式中,在有自动的行车线变更的实施预定时,在预定实施行车线变更目标的行驶车道的行车线变更的空间中,将表示实施行车线变更的预定的标记(以下称为“行车线变更标记”)在使其位置、显示方式按时间序列变化的同时,与本车辆100以及其他车辆一并显示于信息显示画面44。
以下,参照图5至图7,对在显示装置4的处理部43中执行的本实施方式的显示处理的详细情况进行说明。
图5是对本实施方式的显示处理的详细情况进行说明的流程图。
在步骤S1中,显示装置4基于从物体识别装置3接收到的其他车辆信息,将存在于本车辆100的周围的其他车辆与本车辆100一起显示于信息显示画面44。
在步骤S2中,显示装置4基于从车辆控制装置5接收到的驾驶计划信息,判定是否有自动行车线变更的实施预定。如果有自动行车线变更的实施预定,则显示装置4进入步骤S3的处理。另一方面,如果没有自动行车线变更的实施预定,则显示装置4结束本处理。
在步骤S3中,显示装置4在预定实施行车线变更目标的行驶车道的行车线变更的空间中,将行车线变更标记与本车辆100以及其他车辆一并显示于信息显示画面44。例如在行车线变更目标的行驶车道存在对行车线变更造成影响的其他车辆时,显示装置4根据该其他车辆的相对位置,在使行车线变更标记的位置、显示方式按时间序列变化的同时,与本车辆100以及其他车辆一并显示于信息显示画面44。关于本实施方式的行车线变更标记的具体的显示方法,参照图6以及图7在后面叙述。
在步骤S4中,显示装置4基于从车辆控制装置5接收到的驾驶计划信息,判定预定实施的自动行车线变更是否完成,或者是否由于某些理由而中止。显示装置4在预定实施的自动行车线变更完成或中止时,进入步骤S5的处理。另一方面,如果预定实施的自动行车线变更尚未完成,并且也没有中止,则显示装置4返回步骤S3的处理,继续行车线变更标记的显示。
在步骤S5中,显示装置4从信息显示画面44删除行车线变更标记。
以下,参照图6以及图7,对本实施方式的行车线变更标记的具体的显示方法进行说明。
图6是表示如下情况的行车线变更标记的时间序列性的变化的情形的图,所述情况为:在行车线变更目标的行驶车道上对行车线变更造成影响的其他车辆存在于信息显示画面44的显示范围内。
如图6(A)以及图6(B)所示,在有自动行车线变更的实施预定,且本车辆100为了执行行车线变更而待机的状态时,在行车线变更目标的行驶车道上显示作为行车线变更标记的线状标记10A。
线状标记10A显示于预定实施行车线变更目标的行驶车道的行车线变更的空间。在信息显示画面44的显示范围内存在其他车辆时,显示线状标记10A的空间设为其他车辆的后方的空间,由此,驾驶员能够容易地判断在哪个其他车辆的后方预定实施行车线变更。
在图6所示的例子中,如图6(A)所示,线状标记10A首先显示于本车辆100的右斜前方的两辆其他车辆所夹的空间。之后,为了向显示了线状标记10A的空间进行行车线变更而控制本车辆100的速度,随着时间的经过,伴随着与两辆其他车辆的相对位置发生变化,线状标记10A的位置逐渐变化。然后,如图6(B)所示,若线状标记10A显示于本车辆100的正侧面,则实施行车线变更。
这样,通过与其他车辆一起在行车线变更的实施预定空间显示行车线变更标记,并根据其他车辆的相对位置使行车线变更标记的位置按时间序列变化,从而驾驶员能够容易地掌握何时实施行车线变更或者要在行车线变更目标的行驶车道的哪个位置实施行车线变更。
另外,在本实施方式中,若实际执行行车线变更时成为充分确保能够进行行车线变更的空间且能够进行行车线变更的状态,则如图6(C)所示,为了将实际执行行车线变更的情况向驾驶员传达,使显示于本车辆100的正侧面的线状标记10A变化为面状标记10B。
这样,在为了执行行车线变更而待机时和实际执行行车线变更时,通过使行车线变更标记的显示方式变化,能够更加明确何时实施行车线变更。另外,若无法掌握是处于用于行车线变更的待机状态还是接下来要实施行车线变更,则作为驾驶员,难以进行是否应该进行用于行车线变更的超控的判断,但通过使行车线变更标记的显示方式变化,驾驶员能够容易地掌握是用于行车线变更的待机状态还是接下来要实际实施行车线变更,能够根据需要进行超控。
另外,在本实施方式中,在行车线变更目标的行驶车道不存在对行车线变更造成影响的其他车辆时,在本车辆100的正侧面显示线状标记10A之后,立即使其变化为面状标记10B来实施行车线变更,但也可以不显示线状标记10A而从最初显示面状标记10B。
另外,在本实施方式中,将为了执行行车线变更而待机时的行车线变更标记设为线状标记10A,将实际执行行车线变更时的行车线变更标记设为面状标记10B,但各行车线变更标记的显示方式并不特别限定。
图7是表示如下情况的行车线变更标记的时间序列性的变化的情形的图,所述情况为:在行车线变更目标的行驶车道上对行车线变更造成影响的其他车辆在比本车辆100靠后方的位置行驶,且存在于信息显示画面44的显示范围外。
在本车辆100的后方的行车线变更目标的行驶车道上行驶的其他车辆的相对速度快的情况下,有时会制作在该其他车辆赶超了本车辆100之后向该其他车辆的后方进行行车线变更的驾驶计划。在制作了这样的驾驶计划的情况下,预定实施行车线变更的空间成为在本车辆100的后方远方的行车线变更目标的行驶车道上行驶的其他车辆的后方的空间,但由于信息显示画面44的显示范围有限,因此难以在信息显示画面44显示在本车辆100的后方远方行驶的其他车辆。因此,在制作了这样的驾驶计划的情况下,如何将本车辆100处于为了执行行车线变更而待机的状态这一情况传递给驾驶员成为问题。
因此,在本实施方式中,在制作了这样的驾驶计划时,即在行车线变更目标的行驶车道存在对行车线变更造成影响的其他车辆,但该其他车辆存在于本车辆100的后方而不存在于信息显示画面44的显示范围内时,如图7(A)所示,将作为行车线变更标记的线状标记10A显示于行车线变更目标的行驶车道的后端。
并且,如图7(B)所示,如果其他车辆存在于信息显示画面44的显示范围内,则在该其他车辆的后方的空间显示线状标记10A,并且与该其他车辆的相对位置的变化相应地使线状标记10A的位置逐渐向前方移动。
由此,驾驶员能够容易地掌握在进行行车线变更时,处于等待在本车辆100的后方远方的行车线变更目标的行驶车道上行驶的其他车辆的通过的状态。
根据以上说明的本实施方式,能够自动地进行行车线变更的车辆100具备:物体识别装置3,构成为识别存在于车辆100的周围的其他车辆,并且计算该其他车辆的相对位置;以及显示装置4,用于显示向车辆100的乘员提供的信息。而且,显示装置4构成为,在由物体识别装置3计算出的相对位置与车辆100一起显示其他车辆,在有自动的行车线变更的实施预定时,在预定实施行车线变更目标的行驶车道的行车线变更的空间显示表示预定实施行车线变更的行车线变更标记,在行车线变更目标的行驶车道存在对行车线变更造成影响的其他车辆时,根据其他车辆的相对位置使行车线变更标记的位置变化。具体而言,显示装置4构成为,在行车线变更目标的行驶车道存在对行车线变更造成影响的其他车辆,且该其他车辆存在于显示装置4的信息显示画面44的显示范围内时,将预定实施行车线变更的空间设为其他车辆的后方的空间。
这样,通过与其他车辆一起在行车线变更的实施预定空间显示标记,并根据其他车辆的相对位置而使该标记的位置按时间序列变化,驾驶员能够容易地掌握何时实施行车线变更或者要在行车线变更目标的行驶车道的哪个位置实施行车线变更。
另外,本实施方式的显示装置4还构成为,在行车线变更目标的行驶车道存在对行车线变更造成影响的其他车辆,而该其他车辆存在于本车辆100的后方而不存在于显示装置4的信息显示画面44的显示范围内时,将行车线变更标记显示于行车线变更目标的行驶车道的后端。
由此,驾驶员能够容易地掌握在进行行车线变更时,处于等待在本车辆100的后方远方的行车线变更目标的行驶车道上行驶的其他车辆的通过的状态。
另外,本实施方式的显示装置4还构成为,在为了执行行车线变更而待机时和实际执行行车线变更时,使行车线变更标记的显示方式变化。
若无法掌握是处于用于行车线变更的待机状态还是接下来要实施行车线变更,则作为驾驶员难以进行是否应该进行用于行车线变更的超控的判断,但通过使行车线变更标记的显示方式变化,驾驶员能够容易地掌握是处于用于行车线变更的待机状态还是接下来要实际实施行车线变更,能够根据需要进行超控。
以上,对本发明的实施方式进行了说明,但所述实施方式只不过示出了本发明的应用例的一部分,并不是将本发明的技术范围限定于所述实施方式的具体结构的意思。
附图标记说明
100车辆、本车辆
3物体识别装置
4显示装置