基于微流控的五通道细胞显微操作手爪及控制方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明所涉及一种显微操作手爪,尤其是涉及一种基于微流控的五通道细胞显微操作手爪及控制方法,实现对细胞三维姿态的调整。
背景技术
随着现代生物医学工程技术的发展,显微操作已经扩大到动植物育种、濒危动物保护、微流控芯片技术等方面。细胞操作是典型的显微操作,在对细胞操作时首先要对细胞进行三维姿态调整,且要求细胞姿态调整要高效高质。目前,细胞姿态调整主要采用人工在显微镜下操作显微针进行手动调整,这种方式操作效率低(3min/个)、操作经验要求高、人工劳动量大,并且会对细胞造成不同程度的损伤。此外少量采用基于高频点脉冲的细胞旋转操作显微针调整细胞姿态,该显微针加工复杂,同时高频电脉冲对细胞的生理机能及活性影响尚不明确。
发明内容
本发明的目的在于提供一种基于微流控的五通道细胞显微操作手爪及控制方法,完成细胞的高效灵巧操作,以液体作为动力驱动细胞,实现细胞三维姿态和位置的调整,缓解由于长期以来人工手动方式调整细胞姿态和位置的效率低和细胞损伤问题。
本发明采用的技术方案是:
一、一种基于微流控的五通道细胞显微操作手爪:
本发明包括CCD摄像机、计算机、控制器、驱动器、五个微量柱塞泵和五通道手爪,五通道手爪与五个微量柱塞泵连接,五个微量柱塞泵经驱动器、控制器、计算机和CCD摄像机依次电连接;
每个微量柱塞泵通过两个装配支撑件安装在安装底座上,安装底座安装在固定板的安装槽上;微量柱塞泵包括步进电机、传动部件、光电传感器和泵头,光电传感器安装在传动部件上,光电传感器与控制器电连接,光电传感器作用是实现微量柱塞泵的零位检测,传动部件的两端分别通过装配支撑件与步进电机和泵头连接;
五通道手爪包括手爪基体和五个通道,五通道手爪的手爪基体的末端开设有一个内凹的半球面,半球面上依次开设五个通道,包括手爪第一通道、手爪第二通道、手爪第三通道、手爪第四通道和手爪第五通道,均贯通于手爪基体的根端,五个通道的根端分别与五个微量柱塞泵的五个出水口连通。
所述的五通道手爪末端内凹的半球面的直径大于所需操作的细胞的直径,小于所需操作的细胞的直径的1.2倍,具体可根据所需操作的细胞大小更换不同尺寸的五通道手爪,操作时细胞位于内凹的半球面内。
所述的手爪第三通道开设于五通道手爪顶端内凹的半球面的表面中心处,手爪第一通道、手爪第二通道、手爪第四通道和手爪第五通道均匀间隔分布在手爪第三通道的四周,手爪第一通道和手爪第四通道的连线与手爪第二通道和手爪第五通道的连线垂直,手爪第一通道、手爪第二通道、手爪第四通道和手爪第五通道中的水流冲击细胞使细胞姿态沿着指定的方向进行旋转,手爪第三通道吸附细胞实现对细胞的吸附、移动和定向控制。
所述的控制器的核心为单片机,控制器通过PID控制方法调节五个微量柱塞泵的流量,从而控制五通道手爪的流速,实现细胞姿态的调整。
所述的固定板的安装槽上开设多个槽孔,多个槽孔可以安装不同尺寸的安装底座。
二、一种基于微流控的五通道细胞显微操作手爪的控制方法:
本发明的控制步骤如下:
1)将所述装置安装在显微操作实验台上;
2)将所述装置中的五个微量柱塞泵的吸入端连接培养液,并进行调试,确保五个微量柱塞泵与五通道手爪之间的液体运输顺利;
3)将五个微量柱塞泵与驱动器、控制器、计算机和CCD摄像机依次电连接,将光电传感器与控制器电连接,控制器控制光电传感器以实现五个微量柱塞泵的零位检测,并进一步检查确保所述装置能正常工作;
4)启动所述装置,CCD摄像机拍摄采集需要操作的细胞当前的姿态信息,将细胞当前的姿态信息传输至计算机中,计算机通过相应的算法提取细胞当前的姿态,并通过计算处理得到细胞从当前的姿态调整到目标姿态需要旋转的角度,进而将需要旋转的角度值转化为对应的流量值;
5)将得到的流量值发送到控制器中,控制器将流量值转化为脉冲信号发送给驱动器,驱动器驱动步进电机调节泵头的流量至步骤)中获得的对应的流量值;
6)泵头调节五通道手爪中五个通道的水流的流量值进而控制五通道手爪中每个通道的水流至各自的流速;
7)同时连通手爪第一通道和手爪第四通道或手爪第二通道和手爪第五通道或者第一通道、手爪第二通道、手爪第四通道和手爪第五通道的所有通道,使得连通的通道中的水流按照步骤)中得出的各自的流速冲击细胞,驱使细胞旋转,同时连通手爪第三通道,吸附细胞,此时,细胞仅发生旋转运动而不移动,细胞从当前的姿态调整到目标姿态,实现细胞三维姿态的调整。
所述的手爪第二通道与手爪第三通道中的水流冲击细胞使得细胞按相反的方向旋转,手爪第二通道与手爪第三通道中的水流冲击细胞使得细胞按相反的方向旋转。
所述的控制器通过PID控制方法调节五个微量柱塞泵的流量。
本发明具有的有益效果是:
本发明是通过改变调节微量柱塞泵的流量控制手爪每个通道的流速实现细胞三维姿态和位置的调整,减少了人工手动操作的劳动量,提高了操作效率和质量,并缓解了细胞损伤的问题。
附图说明
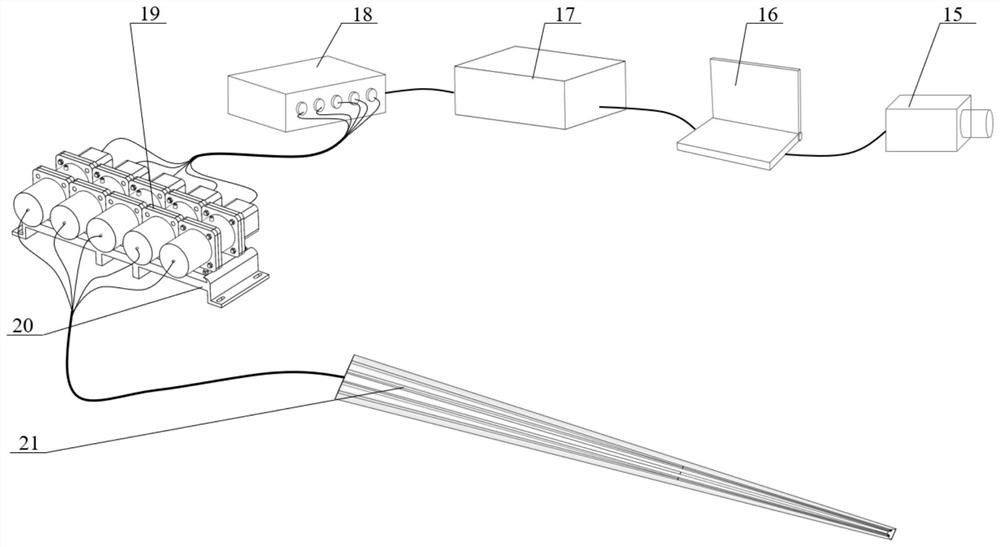
图1是本发明装置的结构示意图;
图2是本发明装置的固定板示意图;
图3是本发明装置的微量柱塞泵结构示意图;
图4是本发明装置的五通道手爪结构图;
图5是本发明装置的五通道手爪调整细胞姿态示意图。
图中:1、手爪第一通道,2、手爪第二通道,3、手爪第三通道,4、手爪第四通道,5、手爪第五通道,6、手爪基体,7、步进电机,8、装配支撑件,9、传动部件,10、光电传感器,11、泵头,12、安装底座,13、安装槽,14、槽孔,15、CCD摄像机,16、计算机,17、控制器,18、驱动器,19、微量柱塞泵,20、固定板,21、五通道手爪。
具体实施方式
下面结合附图和实施例对本发明作进一步说明。
如图1、图2、图3和图4所示,包括CCD摄像机15、计算机16、控制器17、驱动器18、五个微量柱塞泵19和五通道手爪21,五通道手爪21与五个微量柱塞泵19连接,五个微量柱塞泵19经驱动器18、控制器17、计算机16和CCD摄像机15依次电连接,控制器17的核心为单片机,控制器17通过PID控制方法调节五个微量柱塞泵19的流量,从而控制五通道手爪21的流速,实现细胞姿态的调整;
每个微量柱塞泵19通过两个装配支撑件8安装在安装底座12上,安装底座12安装在固定板20的安装槽13上,固定板20的安装槽13上开设多个槽孔14,多个槽孔14可以安装不同尺寸的安装底座12;微量柱塞泵19包括步进电机7、传动部件9、光电传感器10和泵头11,光电传感器10安装在传动部件9上,光电传感器10与控制器17电连接,光电传感器10作用是实现微量柱塞泵19的零位检测,传动部件9的两端分别通过装配支撑件8与步进电机7和泵头11连接;
五通道手爪21包括手爪基体6和五个通道,五通道手爪21的手爪基体6的末端开设有一个内凹的半球面,五通道手爪21末端内凹的半球面的直径大于所需操作的细胞的直径,小于所需操作的细胞的直径的1.2倍,具体可根据所需操作的细胞大小更换不同尺寸的五通道手爪21,操作时细胞位于内凹的半球面内,半球面上依次开设五个通道,包括手爪第一通道1、手爪第二通道2、手爪第三通道3、手爪第四通道4和手爪第五通道5,均贯通于手爪基体6的根端,五个通道的根端分别与五个微量柱塞泵19的五个出水口连通,手爪第三通道3开设于五通道手爪21顶端内凹的半球面的表面中心处,手爪第一通道1、手爪第二通道2、手爪第四通道4和手爪第五通道5均匀间隔分布在手爪第三通道3的四周,手爪第一通道1和手爪第四通道4的连线与手爪第二通道2和手爪第五通道5的连线垂直,手爪第一通道1、手爪第二通道2、手爪第四通道4和手爪第五通道5中的水流冲击细胞使细胞姿态沿着指定的方向进行旋转,手爪第三通道3吸附细胞实现对细胞的吸附、移动和定向控制。
本发明的工作原理及步骤如下:
1)将所述装置安装在显微操作实验台上;
2)将所述装置中的五个微量柱塞泵19的吸入端连接培养液,并进行调试,确保五个微量柱塞泵19与五通道手爪21之间的液体运输顺利;
3)将五个微量柱塞泵19与驱动器18、控制器17、计算机16和CCD摄像机15依次电连接,将光电传感器10与控制器17电连接,控制器17控制光电传感器10以实现五个微量柱塞泵19的零位检测,并进一步检查确保所述装置能正常工作;
4)启动所述装置,CCD摄像机15拍摄采集需要操作的细胞当前的姿态信息,将细胞当前的姿态信息传输至计算机16中,计算机16通过相应的算法提取细胞当前的姿态,并通过计算处理得到细胞从当前的姿态调整到目标姿态需要旋转的角度,进而将需要旋转的角度值转化为对应的流量值;
5)将得到的流量值发送到控制器17中,控制器17将流量值转化为脉冲信号发送给驱动器18,驱动器18驱动步进电机7调节泵头11的流量至步骤4)中获得的对应的流量值;
6)泵头11调节五通道手爪21中五个通道的水流的流量值进而控制五通道手爪21中每个通道的水流至各自的流速;
7)同时连通手爪第一通道1和手爪第四通道4或手爪第二通道2和手爪第五通道5或者第一通道1、手爪第二通道2、手爪第四通道4和手爪第五通道5的所有通道,使得连通的通道中的水流按照步骤6)中得出的各自的流速冲击细胞,驱使细胞旋转,手爪第二通道2与手爪第三通道5中的水流冲击细胞使得细胞按相反的方向旋转,手爪第二通道1与手爪第三通道4中的水流冲击细胞使得细胞按相反的方向旋转,同时连通手爪第三通道3,吸附细胞,此时,细胞仅发生旋转运动而不移动,细胞从当前的姿态调整到目标姿态,实现细胞三维姿态的调整,如图5所示。