一种蔬菜苗自动嫁接机器人系统
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及蔬菜种植设备技术领域,特别涉及一种蔬菜苗自动嫁接机器人系统。
背景技术
大部分的蔬菜类,例如西瓜、黄瓜等蔬菜苗都是通过嫁接的形势提高其产量或者成活率。南瓜苗、冬瓜苗抗虫害的能力比较强,属于比较耐活的;而西瓜苗、黄瓜抗虫害能力差,所以,普遍采用将西瓜苗嫁接到南瓜苗上。现在普遍采用人工嫁接的方法,以西瓜苗向南瓜苗上嫁接为例,人工对西瓜苗和南瓜苗用刀片削尖,然后将西瓜苗尖插到南瓜苗上,然后用一个塑料夹子夹住。人工一天工作8-10小时,能完成1500颗嫁接。
苗圃厂一般是在大棚里育苗,所以环境属于高温、高湿,由于使用胺磷废料,空气中有有害物质,同时,随着生活条件越来越好,嫁接工越来越难找。苗圃厂一般常年工作量较大,因此,使用人工从事嫁接工作存在许多弊端,不利于厂区的嫁接工作顺利进行;
为此,提出一种蔬菜苗自动嫁接机器人系统。
发明内容
有鉴于此,本发明实施例希望提供一种蔬菜苗自动嫁接机器人系统,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
本发明实施例的技术方案是这样实现的:一种蔬菜苗自动嫁接机器人系统,包括主体组件、嫁接组件、夹持组件和控制器,所述主体组件包括第一车体、第二车体、皮带输送机、第三车体、第四车体、第一固定座、第二固定座和第三固定座;
所述嫁接组件包括第一机械臂、第二机械臂、第三机械臂、第四机械臂、第五机械臂、第六机械臂、第七机械臂、工字架和摄像机;
所述皮带输送机的两侧对称设有两个第一固定座,两个所述第一固定座的上表面分别安装有第三机械臂、第四机械臂和第五机械臂,所述第三机械臂上安装有刀片,所述第四机械臂上安装有夹持组件;
所述皮带输送机的上表面焊接有工字架,所述工字架的一侧对称安装有两个摄像机,
所述控制器安装于皮带输送机的一侧,所述第四机械臂的信号输出端与控制器的信号输入端信号连接,所述控制器的信号输出端与第一机械臂、第二机械臂、第三机械臂、第四机械臂、第五机械臂、第六机械臂和第七机械臂的信号输入端信号连接。
在一些实施例中:所述皮带输送机的两侧分别设有第二固定座和第三固定座。
在一些实施例中:所述第二固定座的一侧设有第一车体和第二车体。
在一些实施例中:所述第三固定座的一侧设有第三车体和第四车体。
在一些实施例中:所述第一机械臂和第二机械臂安装于第二固定座的上表面。
在一些实施例中:所述第一机械臂和第二机械臂安装于第二固定座的上表面,所述第六机械臂和第七机械臂安装于第三固定座的上表面。
在一些实施例中:所述夹持组件包括连接板、固定板、电机、双向丝杆、螺纹套、弧形板体、限位杆和滑块;
所述连接板固定连接于第四机械臂上,所述连接板的一侧对称焊接有两个固定板,两个所述固定板相邻的一侧通过轴承转动连接有双向丝杆。
在一些实施例中:所述电机安装于固定板的一侧,所述双向丝杆的一端与电机的输出轴焊接。
在一些实施例中:所述双向丝杆的外侧对称螺纹连接有两个螺纹套,所述螺纹套的外侧一体成型有弧形板体。
在一些实施例中:所述弧形板体的两侧对称焊接有两个滑块,两个所述固定板相邻的一侧对称焊接有两个限位杆,所述滑块的内侧滑动于限位杆的外侧。
本发明实施例由于采用以上技术方案,其具有以下优点:
本发明通过采用第一机械臂和第二机械臂夹取嫁接苗和被嫁接苗,通过皮带输送机输送,摄像机获取工作影像,并通过第三机械臂、第四机械臂和第五机械臂对苗尖进行削尖,并且将嫁接苗尖插入被嫁接苗杆,同时,第五机械臂将现有的一次性塑料夹夹住嫁接苗尖插入被嫁接苗杆处,提高成活率,嫁接完毕后,通过第六机械臂和第七机械臂将嫁接完成的蔬菜苗托盘和废弃苗托盘放置在第三车体和第四车体上,无需人工完成嫁接工作,节省劳动力,加强嫁接效率,利于厂区的嫁接工作顺利进行。
上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
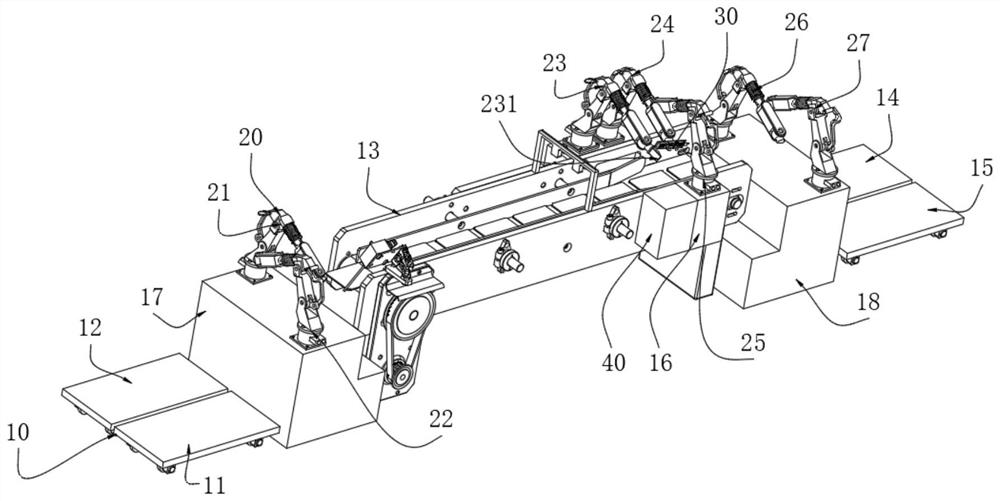
图1为本发明一视角的立体结构图;
图2为本发明另一视角的立体结构图;
图3为本发明另一视角的立体结构图;
图4为本发明夹持组件的结构图。
附图标记:10、主体组件;11、第一车体;12、第二车体;13、皮带输送机;14、第三车体;15、第四车体;16、第一固定座;17、第二固定座;18、第三固定座;20、嫁接组件;21、第一机械臂;22、第二机械臂;23、第三机械臂;231、刀片;24、第四机械臂;25、第五机械臂;26、第六机械臂;27、第七机械臂;28、工字架;29、摄像机;30、夹持组件;31、连接板;32、固定板;33、电机;34、双向丝杆;35、螺纹套;36、弧形板体;37、限位杆;38、滑块;40、控制器。
具体实施方式
在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
下面结合附图对本发明的实施例进行详细说明。
如图1-4所示,本发明实施例提供了一种蔬菜苗自动嫁接机器人系统,包括主体组件10、嫁接组件20、夹持组件30和控制器40,主体组件10包括第一车体11、第二车体12、皮带输送机13、第三车体14、第四车体15、第一固定座16、第二固定座17和第三固定座18;
嫁接组件20包括第一机械臂21、第二机械臂22、第三机械臂23、第四机械臂24、第五机械臂25、第六机械臂26、第七机械臂27、工字架28和摄像机29;
皮带输送机13的两侧对称设有两个第一固定座16,两个第一固定座16的上表面分别安装有第三机械臂23、第四机械臂24和第五机械臂25,第三机械臂23上安装有刀片231,第四机械臂24上安装有夹持组件30;
皮带输送机13的上表面焊接有工字架28,工字架28的一侧对称安装有两个摄像机29,
控制器40安装于皮带输送机13的一侧,第四机械臂24的信号输出端与控制器40的信号输入端信号连接,控制器40的信号输出端与第一机械臂21、第二机械臂22、第三机械臂23、第四机械臂24、第五机械臂25、第六机械臂26和第七机械臂27的信号输入端信号连接。
在一个实施例中:皮带输送机13的两侧分别设有第二固定座17和第三固定座18;第二固定座17和第三固定座18分别用于安装第一机械臂21、第二机械臂22、第六机械臂26和第七机械臂27。
在一个实施例中:第二固定座17的一侧设有第一车体11和第二车体12;第一车体11用于运输被嫁接苗托盘,第二车体12用于运输嫁接苗托盘。
在一个实施例中:第三固定座18的一侧设有第三车体14和第四车体15;第三车体14用于运输嫁接完毕的蔬菜苗托盘,第四车体15用于运输废弃苗托盘。
在一个实施例中:第一机械臂21和第二机械臂22安装于第二固定座17的上表面;通过以上设置,第一机械臂21用于夹取第二车体12上的嫁接苗托盘,第二机械臂22用于夹取第一车体11上的被嫁接苗托盘。
在一个实施例中:第一机械臂21和第二机械臂22安装于第二固定座17的上表面,第六机械臂26和第七机械臂27安装于第三固定座18的上表面;通过以上设置,第六机械臂26用于夹取第三车体14上的嫁接完毕的蔬菜苗托盘,第七机械臂27用于夹取第四车体15上的废弃苗托盘。
在一个实施例中:夹持组件30包括连接板31、固定板32、电机33、双向丝杆34、螺纹套35、弧形板体36、限位杆37和滑块38;
连接板31固定连接于第四机械臂24上,连接板31的一侧对称焊接有两个固定板32,两个固定板32相邻的一侧通过轴承转动连接有双向丝杆34;通过以上设置,双向丝杆34上的螺纹分为左旋螺纹和右旋螺纹,使得双向丝杆34上的两个螺纹套35可以向相邻或相斥的方向运动,两个固定板32用于为双向丝杆34提供支撑。
在一个实施例中:电机33安装于固定板32的一侧,双向丝杆34的一端与电机33的输出轴焊接;电机33的电性输入端与控制器40的电性输出端电性连接,电机33启动时,可以带动双向丝杆34转动。
在一个实施例中:双向丝杆34的外侧对称螺纹连接有两个螺纹套35,螺纹套35的外侧一体成型有弧形板体36;通过以上设置,由于嫁接苗托盘上的嫁接苗采用圆弧状的花盘,两个弧形板体36配合,可以夹紧托盘上的嫁接苗或被嫁接苗。
在一个实施例中:弧形板体36的两侧对称焊接有两个滑块38,两个固定板32相邻的一侧对称焊接有两个限位杆37,滑块38的内侧滑动于限位杆37的外侧;通过以上设置,限位杆37限定螺纹套35的运动方向。
本实施例中:皮带输送机13为双皮带输送机,可以同时输送被嫁接苗托盘和嫁接苗托盘。
本发明在工作时:通过第一车体11运输嫁接苗托盘,第二车体12运输被嫁接苗托盘,第一机械臂21和第二机械臂22分别夹取嫁接苗托盘和被嫁接苗托盘,将其放置在皮带输送机13上,皮带输送机13运输嫁接苗托盘和被嫁接苗托盘,摄像机29获取皮带输送机13上嫁接苗托盘和被嫁接苗托盘的影像,传输给控制器40,控制第四机械臂24夹取嫁接苗托盘,第三机械臂23通过刀片231对苗尖进行削尖,并且将嫁接苗尖插入被嫁接苗杆,同时,第五机械臂25将现有的一次性塑料夹夹住嫁接苗尖插入被嫁接苗杆处,提高成活率,嫁接工作完毕后,通过第六机械臂26和第七机械臂27夹取嫁接完成后的蔬菜苗托盘和废弃苗托盘,并放置在第三车体14和第四车体15上,完成嫁接工作,无需人工完成嫁接工作,既节省劳动力,也加强了嫁接效率,利于厂区的嫁接工作顺利进行。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。