一种扇区动态划分方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及民航空域扇区划分技术领域,尤其涉及一种扇区动态划分方法。
背景技术
随着我国民航业的迅猛发展,航班量和旅客吞吐量逐年递增,不断增长的客运量使空域资源“管制复杂度”与“管制员能力”不匹配的问题日益突出。管制扇区设计技术,作为空域管理的重要技术之一,是改善空域结构、合理配置空域资源的关键手段。
虽然目前我国已经制定了空域规划方法和原则,但是空域态势越发复杂并且空域状态多变,扇区的结构总是受限于现有扇区的分割和合并,目前并未出现进行基础布局的自动化调整的方法;因此,为了平衡管制员的工作负荷以及增加空域流量、保证空中交通安全,亟需实现扇区的动态划分方法,为提升枢纽运营水平提供关键支撑。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种扇区动态划分方法。
为了实现上述目的,本发明采用了如下技术方案:
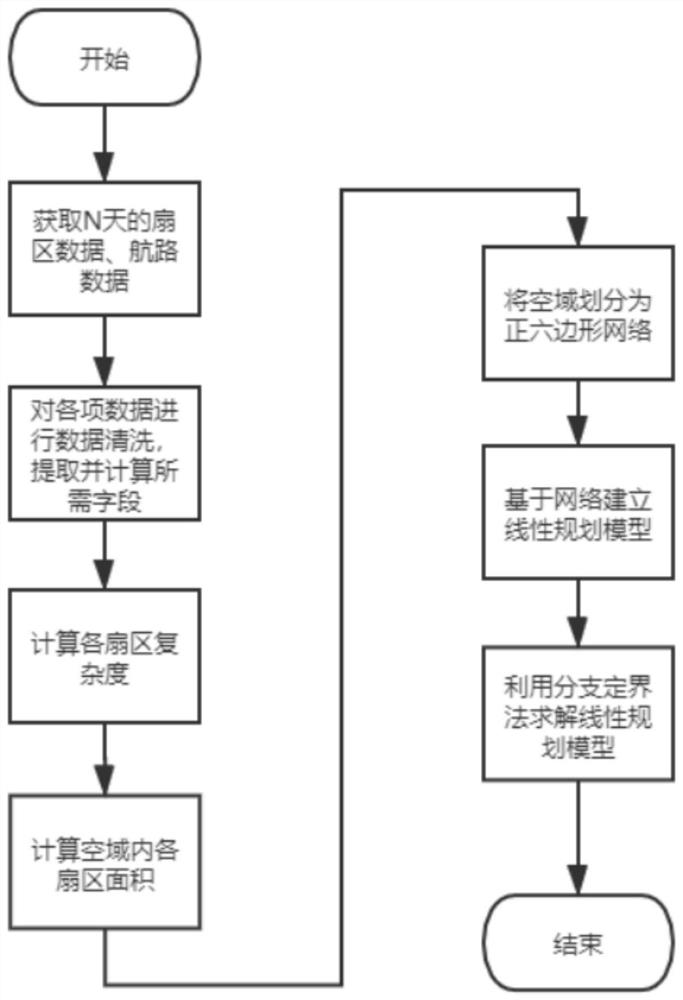
一种扇区动态划分方法,包括扇区动态划分方法,其步骤如下:
获取N天的扇区数据、航路数据;
对各项数据进行数据清洗,提取并计算所需字段;
计算各扇区复杂度;
计算空域内各扇区面积;
将空域划分为正六边形网络;
基于网络建立线性规划模型;
利用分支定界法求解线性规划模型。
优选地,获取全国N天的航迹和扇区数据,共同构成全国空域复杂度运行数据;
扇区数据主要包括以下字段:扇区面积、扇区交叉点个数、扇区交叉点密度、航路穿过扇区次数、航路交叉点到扇区边界的距离、扇区最短穿越时间、扇区各顶点坐标。
优选地,每天24小时各时间段的交通密度、航向变化大于15°的飞机数量、高度变化大于750fit的飞机数量,对扇区表数据进行数据清洗,删除异常值;
其中航迹数据表中主要包括以下字段:航路坐标、航路长度和宽度、航路交叉点;对海量航迹原始数据进行数据清洗,删除异常值。
优选地,考虑扇区状态、航路密集程度、航路交叉状态对空域交通复杂度的影响,建立空域扇区复杂度模型,采用加权的方法计算空域中n个预设扇区总复杂度值TC。
优选地,利用步骤一中得到的扇区各顶点经纬度坐标集合B,其中集合中共有k个顶点B
计算出空域总面积S。
优选地,选出空域边缘上任意一点为起始点,以该点作为第一个正六边形中心点,设每一正六边形边长为450km,以此将现有空域划分为m个正六边形虚拟网格,并得到网络中正六边形各中心点坐标A
优选地,首先扇区动态划分模型选用线性规划模型进行设计,为了降低和均衡各扇区复杂度,构建模型中目标函数如下:
其中:n为划分的扇区个数;i为空域内划分的第i(i=1,2,…,n)个扇区;W
接着考虑模型中的约束条件;首先提供合理的平均扇区穿越时间避免扇区穿越时间过长,设飞机平均飞行速度为v,管制员进行扇区移交的时间为t,第i个扇区内航路航线数量为
随后设航路交叉点与扇区边界的最小值为10NM,利用公式求得航路交叉点与第i个扇区边界的最短距离d
其中:V
d
随后设新规划的第i个扇区边界点坐标集合为C,共有c′个顶点,为保证任意航路穿过同一扇区的次数为1,需满足约束条件:
随后设空域边界顶点坐标集合为E,共有v个顶点,新规划空域边界点坐标集合为B,共有v′个顶点,为保证扇区最外围形状不变,需满足约束条件:
优选地,利用CPLEX求解器对步骤六中的模型进行求解,考虑到正六边形中心点坐标数量有限,故调用的算法为分支定界法;
其中分支定界法是一种求解离散数据组合的最优化问题;通过分支求得不同的可行解,得到新的扇区顶点坐标集合;利用步骤三中的复杂度计算公式计算扇区复杂度,该可行解符合步骤六中约束条件,则此目标值为衡量其他分支的一个界限,并不再考虑比该值差的结果。
相比现有技术,本发明的有益效果为:
1、本发明综合分析了可能影响空域复杂度的因素,如:航路数量和面积、不允许航空器进入的面积、航路交叉角度等;分别计算扇区状态影响因子、航路密集程度影响因子、航路交叉状态影响因子;同时采用加权的方法对复杂度进行评估,更快的得到扇区复杂度值。
2、本发明以平衡扇区复杂度为目标的同时降低各扇区复杂度;同时要保证空域形状不变,扇区为凸边形,航路交叉点不临近扇区边缘等条件,对扇区边缘进行部分调整;相比于合并和重新划分的动态划分方法,本方法对扇区调整相对较小,管制员适应性更强。
3、本发明通过建立正六边形网络,得到各正六边形的中心点;使扇区顶点基于正六边形中心点进行移动,进而改变扇区复杂度;并在移动的同时重新计算各扇区复杂度值进行评估,进而得到最终结果;本方法缩小了扇区边缘调整范围,缩短了调整时间,使扇区复杂度更快的达到均衡。
附图说明
图1为本发明提出的一种扇区动态划分方法的步骤流程示意图;
图2为本发明提出的一种扇区动态划分方法的扇区边界移动示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-2,一种扇区动态划分方法,包括扇区动态划分方法,其步骤如下:
步骤一:获取全国N天的航迹和扇区数据,共同构成全国空域复杂度运行数据;
扇区数据主要包括以下字段:扇区面积、扇区交叉点个数、扇区交叉点密度、航路穿过扇区次数、航路交叉点到扇区边界的距离、扇区最短穿越时间、扇区各顶点坐标;
步骤二:对各项数据进行数据清洗,提取并计算所需字段;
每天24小时各时间段的交通密度、航向变化大于15°的飞机数量、高度变化大于750fit的飞机数量,对扇区表数据进行数据清洗,删除异常值;
其中航迹数据表中主要包括以下字段:航路坐标、航路长度和宽度、航路交叉点;对海量航迹原始数据进行数据清洗,删除异常值;
步骤三:计算各扇区复杂度;
考虑扇区状态、航路密集程度、航路交叉状态对空域交通复杂度的影响,建立空域扇区复杂度模型,采用加权的方法计算空域中n个预设扇区总复杂度值TC;
首先计算扇区状态影响因子W
设第i个扇区的总面积为S
那么空域内扇区面积的平均使用率为:
由此得到该扇区状态因子W
随后计算航路密集程度影响因子W
那么空域内航路航线的平均交叉程度为:
同时设第i个扇区内航路航线数量为
由此得到该扇区密集程度影响因子
随后计算航路交叉状态影响因子W
那么空域内航路交叉点的平均繁忙程度为:
由此得到该扇区交叉状态因子W
接着计算扇区动态复杂度DD,考虑航空器之间的迫近效应,设第i个扇区内某一时间段交通密度为N,航向变化大于15°的飞机数量为N
DD
最后依据以下公式得到所有扇区复杂度总值TC,以及第i个扇区当前复杂度W
步骤四:计算空域内各扇区面积;
利用步骤一中得到的扇区各顶点经纬度坐标集合B,其中集合中共有k个顶点B
计算出空域总面积S;
步骤五:将空域划分为正六边形网络;
选出空域边缘上任意一点为起始点,以该点作为第一个正六边形中心点,设每一正六边形边长为450km,以此将现有空域划分为m个正六边形虚拟网格,并得到网络中正六边形各中心点坐标A
步骤六:基于网络建立线性规划模型;
首先扇区动态划分模型选用线性规划模型进行设计,为了降低和均衡各扇区复杂度,构建模型中目标函数如下:
其中:n为划分的扇区个数;i为空域内划分的第i(i=1,2,…,n)个扇区;W
Q
设权重系数k
SM
其中:
同理可求出扇区边界移动后的周长c
随后计算
参照图2:其中B点所在直线为当前扇区原边界,设A点为正六边形中心点,B点为扇区原顶点,A点所在直线为修改后的扇区边界;
接着考虑模型中的约束条件;首先提供合理的平均扇区穿越时间避免扇区穿越时间过长,设飞机平均飞行速度为v,管制员进行扇区移交的时间为t,第i个扇区内航路航线数量为
随后设航路交叉点与扇区边界的最小值为10NM,利用公式求得航路交叉点与第i个扇区边界的最短距离d
其中:V
d
随后设新规划的第i个扇区边界点坐标集合为C,共有c′个顶点,为保证任意航路穿过同一扇区的次数为1,需满足约束条件:
随后设空域边界顶点坐标集合为E,共有v个顶点,新规划空域边界点坐标集合为B,共有v′个顶点,为保证扇区最外围形状不变,需满足约束条件:
步骤七:利用分支定界法求解线性规划模型;
利用CPLEX求解器对步骤六中的模型进行求解,考虑到正六边形中心点坐标数量有限,故调用的算法为分支定界法;
其中分支定界法是一种求解离散数据组合的最优化问题;通过分支求得不同的可行解,得到新的扇区顶点坐标集合;利用步骤三中的复杂度计算公式计算扇区复杂度,该可行解符合步骤六中约束条件,则此目标值为衡量其他分支的一个界限,并不再考虑比该值差的结果;在后续的计算过程中,不断选取更优的界限代替现有的界限,直到约束条件不被满足再停止该分支;当只有保留分支,其他分支都被排除时,此时保留下来的可行解即为最终扇区划分结果。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。