基于模糊推理的多无人机传感器网络多信道时延优化方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明属于网络通信、多无人机传感器领域,具体涉及一种基于模糊推理的多无人机传感器网络多信道时延优化方法。
背景技术
随着无线通信、微型无人机、微型传感器等相关技术的飞速发展,以无人机为运载平台的传感器网络已经发展为一个热门研究方向。该类网络通常由主动感知各种信息传感器的可移动节点组成,能够在节点动态移动过程中进行实时监测,智能感知并主动采集部署区域内各种对象的特定现象,如地震、电磁、温度、湿度、噪声、光强度、压力、土壤成分、移动物体的大小、速度和方向等。可应用于军事、航空、防爆、救灾、环境、医疗、保健、家居、工业、商业等领域。
多无人机的移动传感器网络有如下特点:节点运动速度和拓扑高度动态、运动方向高度可变、目标环境(干扰)不确定。而当前的无线传感网的多信道协议静态类协议组网速度较慢,时延较高。目前的优化方法多针对节点位置不变、较少考虑信道干扰和数据碰撞的情况。不能满足移动传感网的抗信道干扰、抗数据碰撞以及低时延的特殊需求。因此,对于多无人机传感器网络,设计网络信道优化协议时,需要抗节点拓扑高度动态、抗信道干扰低时延信道的应用需求。
发明内容
为了解决现有技术的不足,本发明旨在提供一种基于模糊推理的多无人机传感器网络多信道时延优化方法,本方法通过设计了自适应权重的模糊推理规则,并进行模糊推理以提升节点的数据传输成功率和网络生存时间,并根据无人机的运动特性和无线网络信道的通信特性,定义了无线传感器网络多信道的核心参数模糊度,并提出了隶属度函数,以动态表征网络信道的质量。
为了实现上述目的,本发明采用的技术方案为:
基于模糊推理的多无人机传感器网络多信道时延优化方法,包括以下步骤:
1)多无人机网络动态参数模糊化;将对于包括n个节点的节点群,将信道干扰因子CIF、信道碰撞因子CCF以及节点方向因子NRD模糊化处理,存储在对应的矩阵中;并分别用μ,λ,
2)构造CIF、CCF、NRD的参数隶属度函数;将CIF的隶属度函数、CCF的隶属度函数、NRD的隶属度函数分别分为多个等级,并计算每级对应NRD论域上的模糊集;
3)设定模糊推理规则;根据不同参数在推理过程的重要性不同,引入参数权重调节因子对推理规则进行优化;
4)模糊推理过程;采用Sugeno推理模型对步骤3)中的推理规则进行模糊推理;
5)加权解模糊;通过平均加权隶属法进行解模糊得出信道性能综合评价指标output值,即CCF、CIF、NRD三个参数的指标综合;
6)对信道综合评价指标output值进行排序;按照其值大小,最终遴选出综合质量评定最优的信道,即选出平均时延最低的信道进行数据传输。
其中,步骤1)中信道干扰因子CIF的模糊化具体包括:
对于网络性能参数表示为b
若该集合的隶属度函数为μ
采用相同的模糊化处理方法,则信道碰撞因子CCF和节点方向因子NRD被模糊化分别表示为:
步骤2)中信道干扰因子CIF隶属度函数分为7个等级,分别表示为极高,非常高,高,中,低,非常低以及极低;每级对应论域上的模糊集表示为:
极高VVH:表示干扰强度值
非常高VH:表示干扰强度值
高H:表示干扰强度值
中M:表示干扰强度值
低L:表示干扰强度值
非常低VL:表示干扰强度值
极低VVL:表示干扰强度值
步骤2)中信道碰撞因子CCF隶属度函数采用梯形函数并分为5个等级,分别表示为非常高,高,中,低以及非常低,则对应论域U
非常高VH:表示信道数据帧碰撞次数CCF∈(8,10],隶属度其余部分为0,则该论域上模糊集表示为:
高H:表示信道数据帧碰撞次数CCF∈(6,8],则该论域上模糊集表示为:
中M:表示信道数据帧碰撞次数CCF∈(4,6],则该论域上模糊集表示为:
低L:表示信道数据帧碰撞次数CCF∈(2,4],则该论域上模糊集表示为:
非常低VL:表示信道数据帧碰撞次数CCF∈[0,2],则该论域上模糊集表示为:
步骤2)中NRD的隶属度函数采用简单一次函数表示并分为5个等级,分别表示为非常高,高,中,低以及非常低,则每级对应NRD论域U
非常高VH:表示运动方向夹角NRD∈(135°,180°],隶属度函数其余部分为0,则该论域上模糊集表示为:
高H:表示节点运动方向夹角NRD∈(90°,135°],则该论域上模糊集表示为:
中M:表示运动方向夹角NRD∈(45°,135°],则该论域上模糊集表示为:
低L:表示运动方向夹角NRD∈45°,90°,则该论域上模糊集表示为:
非常低VL:表示节点运动方向夹角NRD∈[0°,45°],则该论域上模糊集表示为:
步骤3)中采用Sugeno模糊推理模型建立模糊推理规则,规则为:如果NRD是……,且CCF是……,且CIF是……,那么Output为……。
步骤3)中推理规则的优化具体包括:
选用在论域范围内变化平滑的参数
其中,t为实验时间,k
步骤4)中每一条规则都是一个模糊推理命令,每个命令中有三个参量分别为节点运动方向NRD,信道干扰因子CIF以及信道内数据帧碰撞因子CCF作为模糊输入参量,进而影响模糊推理的Output值。
步骤5)具体包括:通过步骤4)中的模糊推理规则,利用Sugeno推理模型得出对应的Output值,以此作为Output论域上的一个模糊集;接着对输出结果进行解模糊,即对得到的Output模糊集进行精确化处理,以此作为信道性能的综合表征;其中设计加权平均隶属度解模糊求解Output精确值,具体计算表达式为:
其中,N为推理规则数目,w
本发明具有的有益效果为:
1.本发明根据无人机的运动特性和无线网络信道的通信特性,定义了无线传感器网络多信道的核心参数模糊度,并提出了隶属度函数,以动态表征网络信道的质量。
2.本发明设计了175条模糊决策规则,通过查表即可进行快速模糊推理,代替了在传感器网在组网和数据数据包传输时的复杂计算量,因此,耗能更小、组网速度更快。
3.本发明根据Sugeno模糊推理并通过平均加权隶属法进行解模糊得出信道性能综合评价指标,以平衡极端特殊情况下的推理误差。并以此为基础来设置了冗余备用信道以提供多样化的信道选择方案。
附图说明
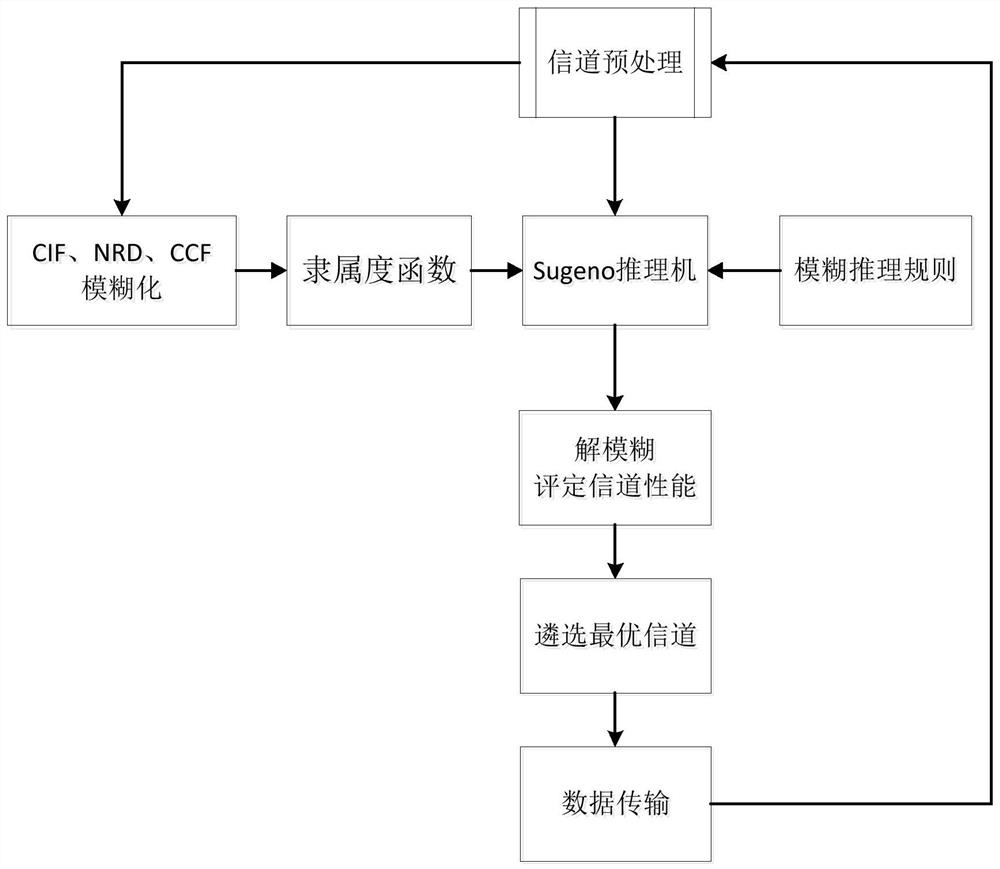
图1是本发明总体设计框图;
图2是NRD隶属度函数示意图;
图3是CIF隶属度函数图;
图4是CCF隶属度函数图;
图5是模糊推理规则图;
图6是Sugeno模糊推理机图;
图7是Sugeno模糊推理过程示例图;
图8是随机飞行模式信道平均时延图;
图9是非随机飞行模式信道平均时延图。
具体实施方式
如图1-7所示,本发明提出了一种基于模糊推理的多无人机传感器网络多信道时延优化方法,以运动方向为30度NRD=30、信道干扰为3个单位CIF=3、数据碰撞拥塞为5单位CCF=5的网络信道状态为例,本发明的具体实施步骤为:
步骤1.多无人机网络动态参数模糊化。
节点方向因子NRD表示在部署过程中节点的实际运动方向差异。信道干扰因子CIF表示在多信道移动通信系统中相邻或邻近信道之间的干扰。信道碰撞因子CCF表示统计时间内信道内数据帧碰撞次数。
将对于包括n个节点的节点群,将信道干扰因子CIF、信道碰撞因子CCF以及节点方向因子NRD模糊化处理,存储在对应的矩阵中。
以信道干扰因子CIF为例来说明参数模糊化过程,其论域U
对于某个网络性能参数表示为b
同时,对于矩阵中的每一个元素
类似地,采用相同的模糊化处理方法,则信道碰撞因子CCF和节点方向因子NRD被模糊化分别表示为:
由此,得到所有n个节点的模糊化的变量CIF、NRD以及CCF的模糊值。其中,μ,λ,
步骤2.构造CIF、CCF、NRD的参数隶属度函数。
信道干扰因子CIF隶属度函数分为7个等级,分别表示为极高,非常高,高,中,低,非常低以及极低;每级对应论域上的模糊集表示为:
极高VVH:表示干扰强度值
非常高VH:表示干扰强度值
高H:表示干扰强度值
中M:表示干扰强度值
低L:表示干扰强度值
非常低VL:表示干扰强度值
极低VVL:表示干扰强度值
信道碰撞因子CCF隶属度函数采用梯形函数并分为5个等级,分别表示为非常高,高,中,低以及非常低,则对应论域U
非常高V H:表示信道数据帧碰撞次数CCF∈(8,10],隶属度其余部分为0,则该论域上模糊集表示为:
高H:表示信道数据帧碰撞次数CCF∈(6,8],则该论域上模糊集表示为:
中M:表示信道数据帧碰撞次数CCF∈(4,6],则该论域上模糊集表示为:
低L:表示信道数据帧碰撞次数CCF∈(2,4],则该论域上模糊集表示为:
非常低VL:表示信道数据帧碰撞次数CCF∈[0,2],则该论域上模糊集表示为:
NRD的隶属度函数采用简单一次函数表示并分为5个等级,分别表示为非常高,高,中,低以及非常低,则每级对应NRD论域U
非常高VH:表示运动方向夹角NRD∈(135°,180°],隶属度函数其余部分为0,则该论域上模糊集表示为:
高H:表示节点运动方向夹角NRD∈(90°,135°],则该论域上模糊集表示为:
中M:表示运动方向夹角NRD∈(45°,135°],则该论域上模糊集表示为:
低L:表示运动方向夹角NRD∈45°,90°,则该论域上模糊集表示为:
非常低VL:表示节点运动方向夹角NRD∈[0°,45°],则该论域上模糊集表示为:
步骤3.设定模糊推理规则。
本发明采用处理模糊规则速度较快的Sugeno模糊推理模型,其模糊规则的“IF”部分与zadeh规则的“IF”部分相似,但它的“THEN”部分可以输出离散值(也可以是低(高)阶线形函数)。所建立的模糊输入参量有三个,在对NRD、CCF、CIF以不同级数模糊化之后,设计出相应的175条模糊推理规则。如图4所示,规则采用如下形式表示:
如果NRD是……,且CCF是……,且CIF是……,那么Output为……。
根据不同参数在推理过程的重要性不同,引入参数权重调节因子对推理规则进行优化,选用在论域范围内变化平滑的参数
其中,t为实验时间,k
步骤4.模糊推理过程。
采用Sugeno推理模型对步骤3)中的推理规则进行模糊推理,把复杂的非线性问题快速转化为多个短线段(隶属度分段函数)问题来解决。
每一条规则都是一个模糊推理命令,每个命令中有三个参量分别为节点运动方向NRD,信道干扰因子CIF以及信道内数据帧碰撞因子CCF作为模糊输入参量,进而影响模糊推理的Output值(信道优化性能的综合依据)。模糊推理结构如图5所示。
本发明用三元组[NRD,CCF,CIF]表示模糊推理的输入,根据隶属度相关定义,分别对应六个元组分别表示Sugeno模糊推理系统的六个推理过程状态。以元组[30,3,5]为例的模糊推理过程如图5所示。
步骤5.加权解模糊。
通过平均加权隶属法进行解模糊得出信道性能综合评价指标。
本发明步骤4中设计的175条模糊规则,利用Sugeno推理模型得出对应的Output值,以此作为Output论域上的一个模糊集。接着对输出结果进行解模糊,即对得到的Output模糊集进行精确化处理,以此作为信道性能的综合表征;其中设计加权平均隶属度解模糊求解Output精确值。
以元组[30,3,5]为例,对应CIF、CCF以及NRD的论域级数分别为7,5,5,取权重w=0.95,其余保持为1不变,ks
可以看出,经过对极端情况解模糊后调整后的Output
通过以上5个步骤,对信道综合评价指标output值进行排序。按照其值大小,最终遴选出综合质量评定最优的信道,即选出平均时延最低的信道进行数据传输。本发明针对无人机为移动平台的移动传感网的高动态、高干扰特性,可快速地遴选出综合评定最优、信道时延最低的信道。
仿真实验:
在本发明中,主要考察无人机运动节点在随机运动和非随机运动两种运动模式下的平均时延的优化情况。本发明更适合高干扰、高拓扑动态、高干扰的移动无线传感网。
如图8-9所示,实验结果各个符号所代表的含义如下所示:
FICO-MAC表示本发明提出的模糊推理的多信道优化策略
FICO-MACCIF+NRD表示仅使用CIF和NRD信道优化策略
FICO-MACCCF+NRD表示仅使用CCF和NRD信道优化策略
EM-MAC表示2011年基于伪随机数预测机制的多信道策略
MC-MAC表示2008年基于粒度的信道分配策略多信道策略
APDM表示2017年马尔可夫分析模型自适应策略
实验1(随机运动模式):
信道平均时延表示单位数据包从源节点传输到目的节点所花费的平均时间,平均时延越低表示网络效率越高。本发明提出的FICO-MAC策略的平均时延优于其他横向对比协议,如图7所示。推理系统根据部署阶段以及信道干扰状态实时推理,将各个信道的Output值进行动态排序,可剔除干扰较大的信道,减少了信道的传输时延。在实验初期(t=300s以内)本发明FICO-MAC的平均信道时延基本稳定在500ms以内,整个实验过程中,信道平均传输时延最小,基本维持在800ms以内。
实验2(非随机运动模式)
在非随机模式下,所有协议的网络平均时延普遍比随机模式有所下降,FICO-MAC协议的时延小于650ms,优于多数对比协议,几乎可以达到APDM协议的最低时延(550ms)。这是因为FICO-MAC针对强干扰碰撞且高动态的网络而设计的,协议依据模糊推理机得到的信道评价指标选择时延更优的信道,减少了信道的传输时延。FICO-MAC能够满足高干扰、高数据碰撞率移动无线传感网的时延需求。