栈板自动分料传送设备
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及栈板回收使用技术领域,特指一种栈板自动分料传送设备。
背景技术
现有的栈板运送货物之后,需要重新回收利用,在物料配送车间,为了将栈板快速回收,会采用传送轨道进行栈板的运送,但是栈板需要一个一个水平放置在传送轨道上,这种方式的效率比较低,不利于快速自动化生产。
因此,基于上述现有的栈板送料方式的缺陷,需要对现有的栈板送料方式进行改进。
发明内容
本发明的目的在于针对现有技术的不足提供一种栈板自动分料传送设备,该栈板自动分料传送设备解决了现有的栈板送料方式所存在的:效率比较低等缺陷。
为实现上述目的,本发明是通过以下技术方案实现的:栈板自动分料传送设备,包括X向轨道,X向轨道配有多个传送辊,X向轨道的进料端下方配有抬升机构、上方配有分料机构,X向轨道的旁边配设有Y向轨道,Y向轨道对应配有转向机构,转向机构位于X向轨道的下方,转向机构与Y向轨道正对,抬升机构、转向机构都具有Y向设置的传送臂,传送臂位于传送辊之间。
所述的分料机构包括竖直滑轨、横梁、顶升气缸,横梁的侧面固定有安装板,安装板的侧面固定有滑块,滑块滑设于竖直滑轨上,安装板之间安装有旋转臂安装杆,旋转臂安装杆固定有L形定位旋转臂,L形定位旋转臂呈L形。
所述的顶升气缸的驱动轴连接横梁,顶升气缸位于旋转臂安装杆的外侧,每次移动一个栈板的距离。
所述的转向机构,包括转向机构上安装座、转向机构下安装座,转向机构下安装座枢接有驱动气缸,驱动气缸的驱动杆与连接杆枢接,连接杆支撑有转向机构传送臂,转向机构传送臂配有传送带,转向机构传送臂固定于转向机构上安装座上,转向机构上安装座与转向机构下安装座之间安装有转向机构交叉臂。
所述的抬升机构包括抬升机构底座、抬升机构上安装座,抬升机构底座枢接有抬升气缸,抬升气缸的驱动杆与抬升机构传送臂枢接,抬升机构传送臂配有传送带,抬升机构传送臂固定于抬升机构上安装座上,抬升机构上安装座与抬升机构底座之间安装有抬升机构交叉臂。
本发明的有益效果在于:多个栈板可以从上向下依次被送出,直到所有栈板完全送出,生产效率高,结构简单、实用,可以实现栈板的自动化流转。
附图说明
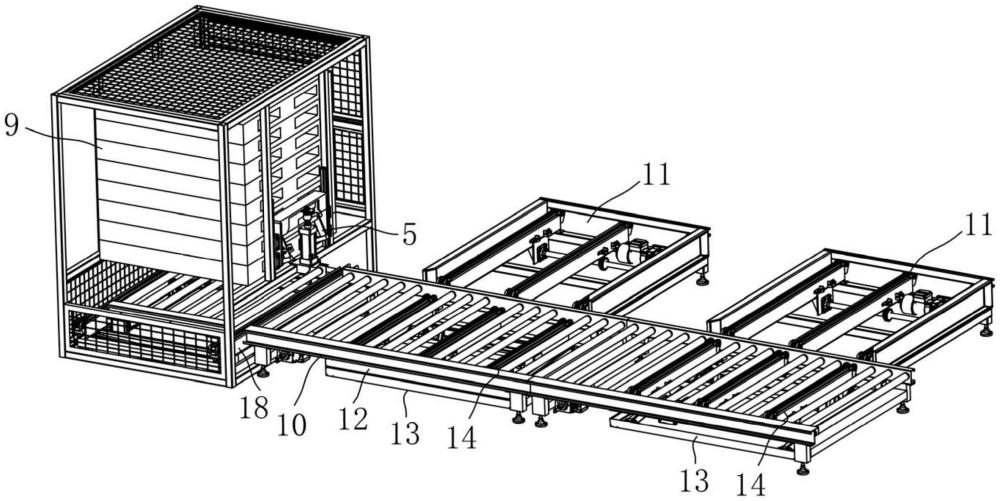
图1为本发明的立体结构示意图。
图2为本发明的局部结构示意图。
图3为本发明的分料机构示意图。
图4为本发明的转向机构示意图。
图5为本发明的抬升机构的前视示意图。
图6为本发明的抬升机构的立体示意图。
图7为本发明的局部结构示意图。
附图标号及说明:
竖直滑轨1、滑块2、横梁3、旋转臂安装杆4、L形定位旋转臂5、顶升气缸6、旋转气缸7、安装板8、栈板9、X向轨道10、Y向轨道11、转向机构上安装座12、转向机构下安装座13、转向机构传送臂14、抬升机构底座15、抬升机构交叉臂16、抬升机构上安装座17、抬升机构传送臂18、滚轮19、转向机构交叉臂20、连接杆21、驱动气缸22、抬升气缸23、框架24。
具体实施方式
下面结合附图对本发明作进一步的说明。
见图1——图7,本发明包括:X向轨道10,X向轨道10配有多个传送辊,X向轨道10的进料端下方配有抬升机构、上方配有分料机构,X向轨道10的旁边配设有Y向轨道11,Y向轨道11对应配有转向机构,转向机构位于X向轨道10的下方,转向机构与Y向轨道11正对。
见图3,本发明的分料机构包括竖直滑轨1、横梁3、顶升气缸6,横梁3的侧面固定有安装板8,安装板8的侧面固定有滑块2,滑块2滑设于竖直滑轨1上,安装板8之间安装有旋转臂安装杆4,旋转臂安装杆4固定有L形定位旋转臂5,L形定位旋转臂5呈L形,L形定位旋转臂5由旋转气缸7驱动旋转。
本发明的分料机构安装于框架24上,框架24位于抬升机构的外围。
本发明的安装板8固定有旋转气缸7,旋转气缸7的驱动轴连接L形定位旋转臂5,旋转气缸7向内复位时,拉动L形定位旋转臂5向内旋转,使L形定位旋转臂5插入栈板9的侧面叉设孔,从而托住栈板9,旋转气缸7向外顶出时,带动L形定位旋转臂5向外旋转,解除对栈板9的限制。
本发明的顶升气缸6的驱动轴连接横梁3,顶升气缸6位于旋转臂安装杆4的外侧。
见图4,本发明的转向机构,包括转向机构上安装座12、转向机构下安装座13,转向机构下安装座13枢接有驱动气缸22,驱动气缸22的驱动杆与连接杆21枢接,连接杆21支撑有转向机构传送臂14,转向机构传送臂14配有传送带,转向机构传送臂14固定于转向机构上安装座12上,转向机构上安装座12与转向机构下安装座13之间安装有转向机构交叉臂20。转向机构交叉臂20的其中一根的一端安装滚轮19并与转向机构上安装座12相抵、另一端与转向机构下安装座13相抵,转向机构交叉臂20的另一根的一端安装滚轮19并与转向机构下安装座13相抵、另一端与转向机构上安装座12相抵。
当栈板移动到转向机构时,驱动气缸14的驱动杆向外伸出时,拉动连接杆21向上移动,使转向机构传送臂14向上升起,转向机构传送臂14接触栈板,并使栈板脱离X向轨道10,直到与Y向轨道11平齐,转向机构传送臂14的传送带将栈板移动到Y向轨道11,传送带的驱动电机等在此不作赘述。
见图5、图6,本发明的抬升机构,包括抬升机构底座15、抬升机构上安装座17,抬升机构底座15枢接有抬升气缸23,抬升气缸23的驱动杆与抬升机构传送臂18枢接,抬升机构传送臂18配有传送带,抬升机构传送臂18固定于抬升机构上安装座17上,抬升机构上安装座17与抬升机构底座15之间安装有抬升机构交叉臂16。抬升机构交叉臂16的其中一根的一端安装滚轮19并与抬升机构底座15相抵、另一端与抬升机构上安装座17相抵,另一根的一端安装滚轮19并与抬升机构上安装座17相抵、另一端与抬升机构底座15相抵。
抬升机构传送臂18位于传送辊之间。
使用时,分料机构有两组,栈板9位于两组分料机构之间,纵向排列。L形定位旋转臂5插入底部的栈板9的叉设孔内,控制旋转气缸7旋转,使L形定位旋转臂5解除对底部的栈板9的限制,底部的栈板9位于下方的传送轨道上,顶升气缸6向上移动,旋转气缸7驱动L形定位旋转臂5向内收回,L形定位旋转臂5插入上方一个栈板9的叉设孔内,这样底部的栈板9就可以被传送轨道传送出去;接着,顶升气缸6向下复位,L形定位旋转臂5托住的栈板9位于传送轨道上。
重复上述步骤,直到所有栈板9被传送出去。
抬升机构可以对接进料的Y向轨道,生产时,堆叠码好的多个栈板9由叉车等设备或者机构送到抬升机构的抬升机构传送臂18上,抬升机构向上升起,然后通过分料机构进行分料,抬升机构下移复位,最下方的栈板9位于X向轨道10上,X向移动到转向机构进行转向,由Y向轨道11出料。
然后通过上述操作方式,使多个栈板9从上向下依次被送出,直到所有栈板9完全送出,生产效率高。
本发明结构简单、实用,可以实现栈板9的纵向快速送料,从而可以配合实现自动化生产。
当然,以上所述之实施例,只是本发明的较佳实例而已,并非限制本发明实施范围,故凡依本发明申请专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本发明申请专利范围内。