一种电动轮椅恒速控制系统及其方法
文献发布时间:2024-01-17 01:13:28
技术领域
本发明属于轮椅控制系统技术领域,具体涉及一种电动轮椅恒速控制系统及其方法。
背景技术
目前市场上智能轮椅控制系统的硬件电机部分,大多采用的技术手段有两种:第一种采用无速度传感器的直流有刷电机,此种控制方式由于没有电机转速的反馈,无法对负载变化做出相应的调整,因此在崎岖不平整路面或者上下坡运行时会出现速度不均匀的情况;第二种采用直流无刷电机,且在直流无刷电机中设置有编码器,通过编码器实时反馈电机的转速来调节轮椅的控制速度,但是采用直流无刷电机相对于直流有刷电机使得轮椅整体的成本较高。
综上所述,亟需提供一种电动轮椅恒速控制系统及其方法,以解决现有技术中恒速控制缺陷和成本较高的问题。
发明内容
为解决现有技术中存在的上述问题,本发明提供了一种电动轮椅恒速控制系统及其方法,通过采集的轮椅姿态数据,对轮椅在平整路面、斜坡路面以及崎岖路面运行时进行速度补偿,实现匀速控制;通过采用无编码器的直流有刷电机,成本低且易于实现。
本发明的目的可以通过以下技术方案实现:
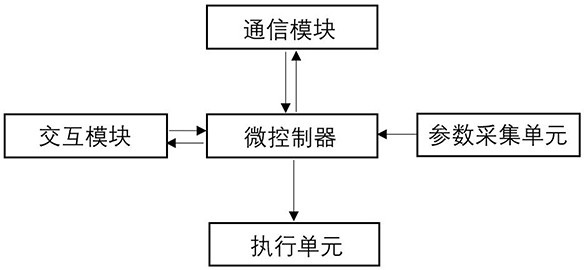
本发明提供了一种电动轮椅恒速控制系统,包括交互模块、执行单元、参数采集单元、通信模块和微控制器,所述交互模块、执行单元、参数采集单元和通信模块均与微控制器建立数据通信;
所述参数采集单元,包括电机电流传感器、电机温度传感器、电源状态传感器、轮椅姿态监测传感器和轮椅状态监测传感器,用于实时采集轮椅的运行参数;
所述微控制器,用于分析和处理来自参数采集单元的轮椅运行参数,从而执行控制策略;同时将轮椅运行参数上传至上位机进行远程监控和控制;
所述控制策略,具体为:
微控制器根据参数采集单元反馈的角速度进行卡尔曼滤波后计算出的姿态数据判断轮椅的姿态:
当轮椅处于坡面行驶时,根据采集的角度数据的不同,通过降低或增加占空比进行相应角度的补偿;同时通过对轮椅前进方向的判断,通过角度数据的变化大小对两个轮毂电机进行差速补偿,以保证轮椅能够保持与坡面垂直的方向行驶;
当轮椅处于崎岖不平的路面行驶时,根据采集角度数据的变化大小通过增加占空比进行相应角度的补偿;
当接收到上下楼的指令时,微控制器根据参数采集单元反馈的电源参数获取电源的可用电量,通过动力余量决策是否要启用履带;
当启用履带上下楼时,如果检测出楼梯角度大于40度,则停止电机输出;如果检测出翻滚角大于10度,说明设备在楼梯上没有直线行驶,降低行驶速度;如果检测出翻滚角大于15度,则停止电机输出,防止倾翻;
轮椅在运行的过程中,微控制器通过对比参数采集单元反馈的轮椅运行参数和预设值范围,发出故障预警与驻停命令。
作为本发明的一种优选技术方案,所述参数采集单元采集的运行参数包括电机的负载电流、电机的温度、电源参数、姿态数据和振动频率。
作为本发明的一种优选技术方案,所述交互模块,包括语音模块和触摸屏模块,用于向微控制器发出指令、请求或查询,同时接收来自微控制器的反馈信息。
作为本发明的一种优选技术方案,所述执行单元,包括电机驱动模块和直流有刷电机,所述电机驱动模块通过接收来自微控制器的PWM信号驱动直流有刷电机运行。
作为本发明的一种优选技术方案,所述电机电流传感器,用于采集直流无刷电机在运行中的负载电流数据并传输至微控制器中进行分析和处理;
所述电机温度传感器,用于采集电机轴承的温度数据并传输至微控制器中进行分析和处理。
作为本发明的一种优选技术方案,所述电源状态传感器,用于采集电源的电压、电流和温度参数并传输至微控制器中进行分析和处理。
作为本发明的一种优选技术方案,所述轮椅姿态监测传感器,包括陀螺仪,通过将测量的角速度传输至微控制器中获取姿态数据;其中,姿态数据包括俯仰角、翻滚角和偏航角。
作为本发明的一种优选技术方案,所述轮椅状态监测传感器,包括加速度传感器,用于采集电机的振动频率并发送至微控制器进行分析和处理。
作为本发明的一种优选技术方案,所述通信模块,通过无线或有线的方式建立与其他设备的通信连接并与微控制器进行数据交换。
本发明还提供了一种电动轮椅恒速控制方法,包括以下步骤:
S1、采集运行参数:通过参数采集单元获取轮椅的运行参数,包括电机的负载电流、电机的温度、电源参数、姿态数据和振动频率;
S2、数据处理与识别:根据运行参数的预设范围,通过电机的温度和振动频率判断轮椅的故障状况,通过姿态数据判断轮椅的行驶路况,通过电源参数判断轮椅的动力及行程;
S3、发送控制指令:通过识别的轮椅的运行状态和交互模块获取的信息生成相应的控制指令,发送至执行单元;
S4、修正控制命令:将参数采集单元反馈的负载电流数据发送至微控制器,根据负载电流与转速的特性曲线,修正占空比使得电机的转速保持恒定;
S5、监测运行状态:循环步骤S1~S4,通过不断监测运行参数,实时调整控制命令。
本发明的有益效果为:
(1)通过采用无编码器的直流有刷电机,根据姿态数据调节PWM信号完成匀速控制和保护控制,成本低且易于实现。
(2)通过陀螺仪提供的姿态数据,具有较高的鲁棒性,对于外界的干扰有非常高的稳定性,可以实现快速响应,在不同路面的应用场景下可以充分发挥陀螺仪对速度补偿的效果。
(3)通过负载电流的反馈,完成了转速的精细化调控,同时配合姿态数据调控保障了系统的稳定性;通过故障预警及驻停功能进一步提高了轮椅在运行过程中的安全性。
附图说明
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
图1为本发明电动轮椅恒速控制系统的结构示意图;
图2为本发明电动轮椅恒速控制方法的步骤示意图。
具体实施方式
为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如下。
一种电动轮椅恒速控制系统,如图1所示,包括交互模块、执行单元、参数采集单元、通信模块和微控制器,所述交互模块、执行单元、参数采集单元和通信模块均与微控制器建立数据通信;
所述交互模块,包括语音模块和触摸屏模块,用于向微控制器发出指令、请求或查询,同时接收来自微控制器的反馈信息。
可理解的是,通过交互模块用户能以语音交互和触摸屏交互的方式实现与电动轮椅之间的人机交互功能。
所述执行单元,包括电机驱动模块和直流有刷电机,所述电机驱动模块通过接收来自微控制器的PWM信号驱动直流有刷电机运行。
需说明的是,执行单元通过电机驱动模块将接收到的PWM信号转换为适合直流有刷电机使用的电信号,从而驱动直流有刷电机运行。为降低成本以及控制复杂度,执行单元选用直流有刷电机,且直流有刷电机在启动和低速工作时能够提供更大的扭矩,有助于轮椅在爬坡时克服重力和地面摩擦力的阻力,为轮椅爬坡时提供足够的动力以保证爬坡速度和行驶的平稳性;同时结合PWM信号驱动,提升了直流有刷电机在速度方面的调节性能。
所述参数采集单元,包括电机电流传感器、电机温度传感器、电源状态传感器、轮椅姿态监测传感器和轮椅状态监测传感器,用于实时采集轮椅的运行参数,为监测和调整系统的运行状态提供依据。
其中,所述电机电流传感器,用于监测直流无刷电机运行中的负载电流变化,并将采集的负载电流数据传输至微控制器中进行分析和处理,以实现对直流无刷电机负载变化的监测和控制。
可理解的是,通过将电机电流传感器安装在电机的电源线路上,进行实时获取电机的负载电流信号,并将其转化为电压信号输出至模数转换器(ADC)转换为数字信号,然后传输到微控制器中进行分析和处理。
所述电机温度传感器,安装于直流无刷电机的轴承处,用于监测轴承的温度变化,并将采集的温度数据传输至微控制器中进行分析,以判断电机的运行状态以及轴承的电腐蚀程度。
需说明的是,由于电机通过PWM信号驱动时,电机会受到共模电压的影响,电机在运行时,其轴承内圈和外圈之间会产生电压和电流,击穿轴承的油膜,导致轴承内表面产生电蚀现象,从而影响轴承的正常使用。因此通过设置有电机温度传感器监测电机运行温度的变化来判断是否存在电腐蚀。
所述电源状态传感器,包括测量电源的电压、电流以及温度等参数的传感器,用于采集电源的电压、电流以及温度等参数,并将采集的数据传输至微控制器中进行处理。
需说明的是,微控制器通过采集的电源的电压、电流以及温度等参数计算电源的可用电量,并通过交互模块向用户展示。
所述轮椅姿态监测传感器,包括陀螺仪,通过将测量的角速度传输至微控制器中进行处理,以实现轮椅姿态的监测。
可理解的是,通过测量的角速度,计算出轮椅的姿态数据,即在三维空间中的欧拉角,包括俯仰角、翻滚角和偏航角等。
所述轮椅状态监测传感器,包括加速度传感器,用于监测轮椅在运行过程中的振动情况,并将采集的振动频率发送至微控制器进行分析。
可理解的是,轮椅的异常振动可能表明机器存在故障或部件磨损的状况。通过对振动频率进行分析,可以预测可能出现的故障,进行及时执行应对措施,避免轮椅在运行过程中意外的发生,进而提高安全性。
所述通信模块,通过无线或有线的方式,用于建立与其他设备的通信连接并与微控制器进行数据交换。
可理解的是,通过通信模块可实时获取控制系统的工作状态并进行远程控制,同时在运行过程中可依据轮椅的运行状态更新控制策略。
所述微控制器,用于分析和处理来自参数采集单元的轮椅运行参数,从而执行控制策略;同时将轮椅运行参数上传至上位机进行远程监控和控制。
具体的,运行参数包括电机的负载电流、电机的温度、电源参数、姿态数据和振动频率。
需说明的是,所述控制策略具体为:
微控制器根据参数采集单元反馈的角速度进行卡尔曼滤波后计算出的姿态数据判断轮椅的姿态。
当轮椅处于坡面行驶时,根据采集的角度数据的不同,通过降低或增加占空比进行相应角度的补偿;同时通过对轮椅前进方向的判断,通过角度数据的变化大小对两个轮毂电机进行差速补偿,以保证轮椅能够保持与坡面垂直的方向行驶。如在0-10度坡面爬坡时,如果检测角度为5度时,根据角度补偿增加5%占空比输出,角度数据检测坡面为10度时,电机占空比可以补偿增加10%占空比输出。
需说明的是,在坡面运行时,如果检测出坡面角度大于15度,则降低输出速度,大于20度则停止电机输出。
当轮椅处于崎岖不平的路面行驶时,根据采集角度数据的变化大小通过增加占空比进行相应角度的补偿。
需说明的是,对于崎岖路面角度数据会频繁变化,根据频繁变化数据判断出时崎岖路面,从而输出电机控制占空比增加10%输出,达到增加输出动力的效果。
当接收到上下楼的指令时,微控制器根据参数采集单元反馈的电源参数获取电源的可用电量,进而判断是否有足够的动力完成上下楼,从而决策是否要启用履带。
当启用履带上下楼时,如果检测出楼梯角度大于40度,则停止电机输出;如果检测出翻滚角大于10度,说明设备在楼梯上没有直线行驶,降低行驶速度;如果检测出翻滚角大于15度,则停止电机输出,防止倾翻。
轮椅在运行的过程中,微控制器通过对比参数采集单元反馈的轮椅运行参数和预设值范围,发出故障预警与驻停命令,进行故障检查。
可理解的是,预设值范围是指通过测试获取到的轮椅在安全运行状态下运行参数的取值范围。
需说明的是,为防止陀螺仪出现故障,从而导致发出错误的PWM信号,通过参数采集单元反馈的电流数据对根据角度数据控制的占空比进行修正,也即轮椅在运行过程中的占空比通过电流数据和角度数据二者进行调控,进一步提高调控的灵敏性与准确性。
具体的,占空比的调控首先根据角度数据的变化进行调整,同时通过负载电流的变化依据建立的负载电流与转速的特性曲线修正占空比,其中负载电流作为转速的反馈来调整输入占空比,进一步提高了调控的精细度。
需说明的是,负载电流与转速的特性曲线通过实际测量绘制,具体为:
(1)准备好测试的直流有刷电机、轮椅电源、电流表和转速计等。设置好转速计以及连接完整电路,将电流表连接到电机的电路中。
(2)启动电机,使用转速计测量电机的转速,并记录下来。首先逐步增加电机的负载,每次增加负载后等待电机达到稳定状态,记录下此时电机的负载电流和转速。然后逐步减少电机的负载,等待电机达到稳定状态后记录电流和转速。
(3)将记录的数据通过整理后绘制出负载电流与转速的特性曲线。
本实施例还提供一种电动轮椅恒速控制方法,如图2所示,包括以下步骤:
S1、采集运行参数:通过参数采集单元获取轮椅的运行参数,包括电机的负载电流、电机的温度、电源参数、姿态数据和振动频率。
S2、数据处理与识别:根据运行参数的预设范围,通过电机的温度和振动频率判断轮椅的故障状况,通过姿态数据判断轮椅的行驶路况,通过电源参数判断轮椅的动力及行程。
S3、发送控制指令:通过识别的轮椅的运行状态及通过交互模块获取的信息生成相应的控制指令,发送至执行单元,实现轮椅的运动控制。
需说明的是,控制命令具体为:
当温度和振动频率在预设值范围以外时,生成故障预警与驻停命令;当角度数据发生变化时,生成调整占空比后的PWM信号;当电源参数在预设值范围以外时,生成动力和行程提示。
S4、修正控制命令:将参数采集单元反馈的电流数据发送至微控制器,根据负载电流与转速的特性曲线,修正占空比使得电机的转速保持恒定。
S5、监测运行状态:循环步骤S1~S4,通过不断监测运行参数,实时调整控制命令。
本发明采用无编码器的直流有刷电机,成本低,依据姿态数据调节PWM信号完成匀速控制和保护控制,易于实现;同时基于陀螺仪提供的姿态数据,具有较高的鲁棒性,对于外界的干扰有非常高的稳定性,不会因为外部环境的变化而导致功能和精度的丢失。可以实现快速响应,在不同路面的应用场景下可以充分发挥陀螺仪对速度补偿的效果且通过负载电流的反馈,在精细化调控的同时保障了系统的稳定性。
本发明依据姿态数据调节PWM信号的占空比,对轮椅在平整路面、斜坡路面以及崎岖路面运行时进行速度补偿,实现匀速控制;同时通过故障预警及驻停等功能提高轮椅在运行过程中的安全性。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。