主动侧倾车辆防侧翻控制方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及一种主动侧倾车辆防侧翻控制方法,属于车辆行驶安全性控制技术领域,应用于主动侧倾车辆行驶控制技术。
背景技术
主动侧倾车辆在弯道行驶时通过控制车辆向弯道内侧倾斜程度,提高了车辆转弯时的操纵稳定性、平顺性、通行速度和安全性,车辆主动侧倾技术可以使车辆在过弯时自动倾斜一定角度,产生一个平衡力矩,来抵抗车辆受到的离心力,以保持轮距较小的微型车辆或重心高的车辆稳定的行驶姿态。
针对主动侧倾车辆行驶安全性,发明专利车辆转向主动侧倾控制方法CN110341697,通过车辆行驶转弯时发出转向指令后先执行侧倾动作,延时特定时长后执行转向动作,实现车辆侧倾、延时转向方式驶入弯道,消除进入弯道时离心力对人体瞬时冲击作用所产生的负面效果,通过车辆侧倾复位回零、转向延时回正方式驶出弯道,在保障车辆行驶安全性基础上,提高了车辆的驾驭平顺性和乘坐舒适性,应用于主动侧倾车辆行驶控制技术。倒三轮车属于窄体车辆,应用于城市单人通勤、或者双人前后乘坐出行,倒三轮车为双前轮和单个后轮布置,倒三轮车高速行驶过程中单个后轮所接触的局部地面附着力不足时,易造成车辆甩尾,引起横摆角加速度突变,在很短时间内车辆横摆角速度急剧变大,引起车辆瞬时侧向力剧变,导致车辆侧翻;由于信息读取、分析计算、数据传输、侧倾角执行到位,产生平衡力需要一定时长,鉴于车辆转向主动侧倾控制方法的逆向控制原理,读取车辆横摆角加速度可以预测横摆角速度的变化规律,提前执行车辆侧倾角,消除侧翻力,防止车辆侧翻。
发明内容
本发明目的是要提供一种主动侧倾车辆防侧翻控制方法,车辆行驶过程中,动态读取车辆横摆角加速度,判断横摆角加速度突变量值,预测横摆角速度的变化规律,执行安全侧倾角,防止车辆侧翻。
为了达到本发明的目的所采取的技术方案如下:
主动侧倾车辆防侧翻控制方法包括如下步骤:
(1)、给定车辆控制参数:车辆许用最大侧向力P
(2)、车辆行驶过程中,给出驾驶意图信息,包括车辆加、减速信息及方向控制信息;
(3)、执行车辆加、减速及方向控制信息;
(4)、车载传感器动态读取车辆瞬时速度v、横摆角速度ω、横摆角加速度ε;
(5)、计算:由P
如果ε>ε
否则,进行下一步;
(6)、计算:弯道行驶力平衡条件为:mg×tanβ=mv(ω+εt
(7)、读入驾驶意图信息,回到步骤(3)继续;
其中:重力加速度g,车辆侧倾部分质量m。
主动侧倾车辆行驶过程中,动态读取车辆瞬时速度v、横摆角速度ω、横摆角加速度ε,计算消除弯道行驶离心力所需侧倾角β,执行弯道行驶侧倾角β,车辆侧倾、保障行驶稳定性;车辆高速行驶过程中,路面附着力下降引起后轮侧滑、造成车辆甩尾,导致横摆角加速度ε突变,当ε>ε
本发明的有益效果在于,所提出的一种主动侧倾车辆防侧翻控制方法,车辆行驶过程中,计算消除弯道行驶离心力所需侧倾角β,执行弯道行驶侧倾角β,保障车辆稳定行驶;动态读取车辆横摆角加速度,判断横摆角加速度突变量值,预测横摆角速度的变化规律,执行安全侧倾角β
附图说明
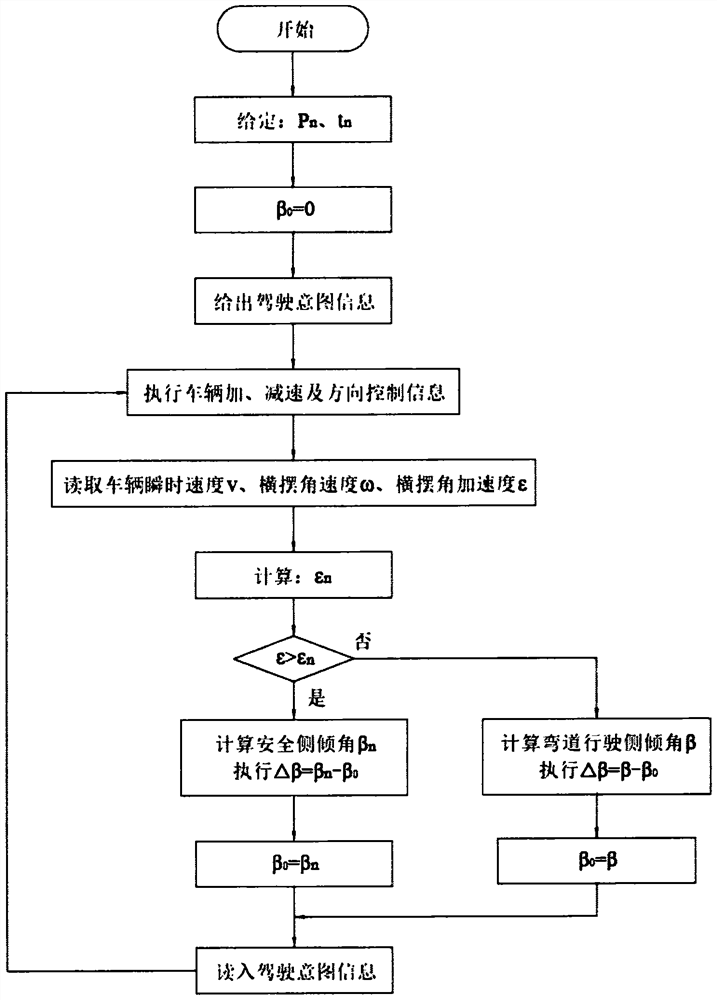
图1为主动侧倾车辆防侧翻控制方法流程图;
图2为主动侧倾车辆防侧翻控制方法原理图。
具体实施方式
下面根据附图对本发明的实施例进行描述。
图1所示的主动侧倾车辆防侧翻控制方法流程图,主动侧倾车辆防侧翻控制方法包括如下步骤:
(1)、给定车辆控制参数:车辆许用最大侧向力P
(2)、车辆行驶过程中,给出驾驶意图信息,包括车辆加、减速信息及方向控制信息;
(3)、执行车辆加、减速及方向控制信息;
(4)、车载传感器动态读取车辆瞬时速度v、横摆角速度ω、横摆角加速度ε;数据传输至车载ECU;
(5)、ECU计算:由P
如果ε>ε
否则,进行下一步;
(6)、ECU计算:弯道行驶力平衡条件为:mg×tanβ=mv(ω+εt
(7)、读入驾驶意图信息,回到步骤(3)继续;
其中:重力加速度g、g=9.8m/s
信号检测和读取方法:车辆瞬时速度v和横摆角速度ω,由WTGAHRS2陀螺仪采集,可检测的速度精度0.1m/s、角速度动态精度0.1°/s;横摆角加速度ε,由JEWELL ASB-1000角加速度计传感器采集,测量精度为0.005rad/s
图2所示的主动侧倾车辆防侧翻控制方法原理图,主动侧倾车辆为倒三轮车,建立右旋正交坐标系XYZ为车辆坐标系,车辆瞬时速度v方向为X正向,垂直于车辆水平面向上为Z正向,横摆角速度ω、横摆角加速度ε右旋矢量Z向为正,弯道行驶侧倾角β和安全侧倾角β
主动侧倾车辆行驶过程中,读取车辆瞬时速度、横摆角速度,计算消除弯道行驶离心力所需侧倾角β,执行弯道行驶侧倾角β、车辆侧倾,保障车辆稳定行驶;读取车辆横摆角加速度、预测横摆角速度的变化规律,执行车辆安全侧倾角β