警示灯模块装配至后视镜镜片的方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及车辆配件领域,尤其涉及后视镜盲区警示灯,具体是指一种警示灯模块装配至后视镜镜片的方法。
背景技术
车辆后视镜通常存在视觉盲区,驾驶员看不到盲区内的车辆,如果盲区内有超车车辆,此时变道就会发生碰撞事故。在雷雨大雾天气、夜间光线昏暗等恶劣环境时,驾驶员更难看清后方车辆,此时变道就面临更大的危险。为了解决后视镜的视觉盲区,盲点监测系统应运而生。
盲点监测系统又叫并线辅助系统,英文简称BSM或者BLIS,主要功能是扫除后视镜盲区。通过电子控制器,在左右两个后视镜内或其他地方驾驶员后方安全范围内有无障碍物或来车。盲点监测系统的警示灯通常安装在后视镜内,在后方安全范围内有障碍物或来车时,发出警示光以提醒驾驶员。
盲点监测系统的警示灯模块通常通过粘附的方式装配在后视镜镜片的相应图案位置中。US9769930B2公开了一种警示灯的定位装配方法,通过影像等技术来实现两种零件(警示灯模块和后视镜镜片的相应图案)之间的准确对位。但是,在警示灯模块的定位装配过程中,会出现零件本身的瑕疵而造成的对位不准确、驾驶员方向看光型存在差异的实际问题。例如,模块点亮过程中,如果膜片边缘或者非形状区域出现漏光等情况时,对位的计算就会出现偏差,造成实际粘贴不准确的现象。
发明内容
本发明的主要目的就是针对以上存在问题,提供一种能够精准定位的警示灯模块装配至后视镜镜片的方法。
为了实现上述目标,本发明具体采用的警示灯模块装配至后视镜镜片的方法如下:
所述的方法包括:
将后视镜镜片置于第一定位装置中,将警示灯模块置于第二定位装置中;
通过R方向旋转和下压伺服机构,移动所述的警示灯模块至第一拍照位置,在不点亮警示灯模块的情况下,第一相机对警示灯模块进行第一次拍照;
根据第一次拍照的图像,视觉处理程序确定警示灯模块在第一拍照位置时的坐标;
通过X和Y方向移动伺服机构,移动所述的后视镜镜片至第二拍照位置,在不点亮警示灯模块的情况下,第一相机对后视镜镜片的图案进行第二次拍照;
根据第二次拍照的图像,视觉处理程序确定后视镜镜片的图案在第二拍照位置时的坐标;
根据两次拍照的图像的坐标,获得后视镜镜片的图案与警示灯模块之间的坐标差值,根据所述的坐标差值,X和Y方向移动伺服机构移动所述的后视镜镜片的图案,或者R方向旋转和下压伺服机构旋转警示灯模块;
通过R方向旋转和下压伺服机构,将警示灯模块下压至后视镜镜片的图案中。
较佳地,后视镜镜片的图案与警示灯模块之间的坐标差值包括:后视镜镜片的图案相对于警示灯模块在X、Y方向的差值Delta_X和Delta_Y,以及警示灯模块相对于后视镜镜片的图案在圆周方向的差值Delta_R。
较佳地,所述的第一相机为竖直方向相机。
较佳地,在警示灯模块下压到后视镜镜片的图案中后,点亮警示灯,第二相机进行拍照,检测图案的光亮度、发光面积和/或图形位置,所述的第二相机位于驾驶员方向。
较佳地,第一相机对警示灯模块进行第一次拍照时,通过辅助光源对警示灯模块进行补光;第一相机对后视镜镜片的图案进行第二次拍照时,通过所述的辅助光源对后视镜镜片的图案进行补光。
采用了本发明的警示灯模块装配至后视镜镜片的方法,在警示灯模块处于不点亮状态的下,影像设备进行二次拍照,采集警示灯模块位置并确定后视镜镜片图案位置,防止警示灯模块相对于后视镜镜片图案歪斜。
附图说明
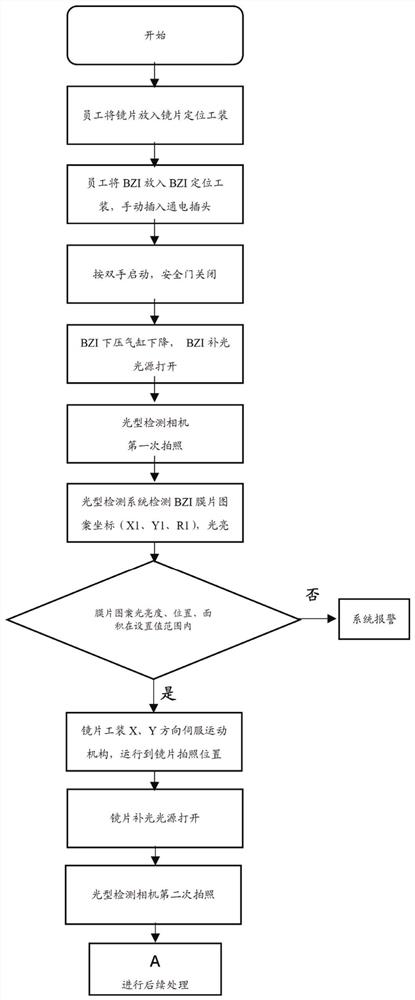
图1至图3为本发明的警示灯模块装配至后视镜镜片的方法的整体流程图。
具体实施方式
为了能够更清楚地描述本发明的技术方案,下面结合具体实例来进行进一步的描述。
请参阅图1至图3所示,本发明提供的警示灯模块装配至后视镜镜片的方法,具体步骤如下:
(1)、人工将后视镜镜片置入第一定位装置中,配置X和Y方向移动伺服机构,实现后视镜镜片在X方向和Y方向的移动;
(2)、人工将警示灯模块置入第二定位装置中,配置R方向旋转和下压伺服机构,实现警示灯模块围绕R方向的旋转以及在R方向的下降;
(3)、启动整个装配系统;
(4)、通过R方向旋转和下压伺服(压装)机构,警示灯模块下降至第一拍照位置,辅助环境光源对警示灯模块进行补光,竖直方向相机对警示灯模块进行第一次拍照;
(5)、根据第一次拍照的图像,视觉处理程序进行处理,与第一预设图案进行图形匹配,并确定警示灯模块在第一拍照位置时的X、Y、R方向的坐标值;
(6)、通过X和Y方向移动伺服机构,根据设定的后视镜镜片图案的X、Y坐标值,将后视镜镜片的图案运行到第二拍照位置,辅助环境光源对后视镜镜片的图案进行补光,竖直方向相机对后视镜镜片的图案进行第二次拍照;
(7)、根据第二次拍照的图像,视觉处理程序进行处理,与第二预设图案进行图形匹配,并确定后视镜镜片的图案在第二拍照位置时X、Y、R方向的坐标值;
(8)、根据两次拍照的X、Y、R值,视觉处理程序计算出后视镜镜片的图案相对于警示灯模块在X、Y方向的差值Delta_X和Delta_Y、以及警示灯模块相对于后视镜镜片的图案在圆周方向的差值Delta_R;
(9)、将Delta_X、Delta_Y、Delta_R输送至PLC,由PLC控制X方向、Y方向、R方向伺服运动,完成Delta_X、Delta_Y、Delta_R三个差值的补偿;
(10)、下压机构将警示灯模块压至后视镜镜片的图案上,点亮警示灯模块,从驾驶员方向角度的相机完成压装后的警示灯和外镜总成图案的光亮度、发光面积、图形位置的检测,根据设定的上、下限值来判断合装是否成功。
其中,第一定位装置和第二定位装置可以配置左右件识别传感器;X和Y方向移动伺服机构可以配置寻零、极限位检测开关。X和Y方向移动伺服机构、R方向旋转和下压伺服机构可以使用伺服电机和丝杠机构实现。
本发明提供的警示灯模块装配至后视镜镜片的方法,视觉处理程序通过区域面积计算、轮廓度计算进行数据采集,计算后视镜镜片的图案相对警示灯模块在X、Y方向的偏移位置、警示灯模块相对后视镜镜片在圆周方向的偏移角度,综合后进行反馈X、Y、R方向的位置信息至PLC控制端,并通过X和Y方向移动伺服机构、R方向旋转和下压伺服机构进行移动,至目标位置后进行下压精准对位粘贴,粘贴结束后点亮警示灯,通过驾驶员方向的影像机构再次拍照,检查驾驶员角度的采光是否正常。
在非点亮状态下进行拍照,能够防止点亮后膜片边缘散射及膜片本身缺陷漏光导致计算失真。同时检测警示灯模块左右PCB是否混装、膜片是否贴在壳体上以及左右膜片是否混贴等。
在此说明书中,本发明已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本发明的精神和范围。因此,说明书应被认为是说明性的而非限制性的。