一种移动反击式破碎站
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及耐腐蚀钢筋技术领域,特别是涉及到一种移动反击式破碎站。
背景技术
移动破碎站是一种可移动的破碎设备,其中移动反击式破碎站是一种常见的移动破碎。移动反击式破碎站,其耐磨件和零部件的精密度和材质都比较好,破碎效率很高,主要应用于建筑、筑路、化学及硅酸盐行业中原料的破碎,根据破碎原理的不同和产品颗粒大小不同,又分为多种不同大小破碎站。传统固定破碎筛分系统占地面积广、投资建设周期长、投入的辅助设备多,生产能耗大,日常维护成本高,且不便转场作业。
如现有技术专利文献CN207563071U公开了一种带返料系统的履带式圆锥破碎站,,包括机架,所述机架上自一端向另一端依次安装有给料机构、破碎机构、行走机构、电控系统、主输送机和振动筛,所述给料机构包括给料斗、给料输送带,所述给料输送带安装在给料斗一侧下方,并延伸至破碎机料罩上部;所述破碎机构包括圆锥式破碎机、破碎机料罩、电动机和皮带传动机构,圆锥式破碎机固定在给料输送带的出料口下侧,电动机通过皮带传动机构带动圆锥式破碎机运转;所述行走机构包括柴油发动机和行走履带,柴油发动机连接液压泵,并通过液压泵带动行走履带所述电控系统安装在机架侧面,所述主输送机下端穿过柴油发动机底部,主输送机的受料斗位于圆锥式破碎机的出料口处,主输送机的受料斗与圆锥式破碎机的落料溜槽相连接,所述振动筛安装在主输送机末端下方,振动筛下方设有成品输送机和中间过渡输送机,半成品石料通过中间过渡输送机连接有返料输送机,返料输送机落料口位于给料机构的给料斗上方,本实用新型功能齐全,设计先进,占地面积小,使用维修方便,运营费用经济,工作稳定可靠。
上述现有技术的破碎站不能实现智能自动控制,需要现场工作人员单独操作,现场环境相对较差,不利于操作人员长期操作,况且,多个破碎站同时工作时,各个破碎站的工作信息、安全信息、实时工作信息不能交互分享,公司管理层不能够实时了解公司所有破碎站工作情况,维护情况,每日、每月或每年产能情况,维护人员不到现场不能了解各个破碎站保养情况等问题。
为了解决上述存在技术问题,本申请提出了一种移动反击式破碎站,所述移动反击式破碎站包括给料系统、破碎系统、动力系统、输送系统、行走系统、液压系统、基体骨架和控制中心系统,所述动力系统和液压系统都设置在动力箱内,所述基体骨架为船型结构,所述行走系统包括左履带和右履带,所述左履带和右履带位于所述基体骨架中间底部的左右两侧,所述动力系统通过热能最终转化为液压能,并通过所述液压系统驱动所左履带和右履带实现行走作业;所述基体骨架上部从一端到另一端依次设置有给料系统、破碎系统、动力系统和输送系统;所述给料系统包括给料斗和给料机,所述给料斗的出口处设置有用于物料振动进料的给料机,所述给料机为采用变频器控制的振动驱动电机;所述破碎系统包括反击式破碎机构,所述反击式破碎机构通过所述液压系统调整排料口宽窄以适应不同物料出料粒度需求;所述输送系统包括主皮带机构、成品皮带机构、返料皮带机构、过渡皮带机构、振动筛机构、除铁器机构和侧皮带机构,所述侧皮带机构设置在所述给料机下方,工作时,待破碎物料经过所述反击式破碎机构破碎后落到所述主皮带机构上,由所述主皮带机构输送至所述振动筛机构进行振动筛分,不符合要求较大粒度的物料,通过所述振动筛机构的筛面上拋落在所述过渡皮带机构上,由所述过渡皮带机构输送到所述返料皮带机构上,再送回所述给料斗,然后进入所述反击式破碎机构重新破碎;符合要求较小粒度的物料,穿过所述振动筛机构的筛面落到所述成品皮带机构上,由所述成品皮带机构输送至所述基体骨架前方堆放;所述除铁器机构设置在主皮带机构上端,用于分离所述主皮带机构的主皮带上物料中的铁块,并输送到所述基体骨架的一侧堆放;所述控制中心系统设置在所述基体骨架靠近所述动力系统下方,所述控制中心系统通过有线网络或无线网络与远程控制端系统相连接,各个机构整体布局合理,节约空间,流水线破碎作业,自动化程度高,能够实现远程自动控制,提高物料破碎效率等优点。
发明内容
本发明的目的是为克服上述现有技术的不足,提供一种移动反击式破碎站,所述移动反击式破碎站包括给料系统、破碎系统、动力系统、输送系统、行走系统、液压系统、基体骨架和控制中心系统,所述动力系统和液压系统都设置在动力箱内,所述基体骨架为船型结构,所述行走系统包括左履带和右履带,所述左履带和右履带位于所述基体骨架中间底部的左右两侧,所述动力系统通过热能最终转化为液压能,并通过所述液压系统驱动所左履带和右履带实现行走作业;
所述基体骨架上部从一端到另一端依次设置有给料系统、破碎系统、动力系统和输送系统;所述给料系统包括给料斗和给料机,所述给料斗的出口处设置有用于物料振动进料的给料机,所述给料机为采用变频器控制的振动驱动电机;所述破碎系统包括反击式破碎机构,所述反击式破碎机构通过所述液压系统调整排料口宽窄以适应不同物料出料粒度需求;
所述输送系统包括主皮带机构、成品皮带机构、返料皮带机构、过渡皮带机构、振动筛机构、除铁器机构和侧皮带机构,所述侧皮带机构设置在所述给料机下方,工作时,待破碎物料经过所述反击式破碎机构破碎后落到所述主皮带机构上,由所述主皮带机构输送至所述振动筛机构进行振动筛分,不符合要求较大粒度的物料,通过所述振动筛机构的筛面上拋落在所述过渡皮带机构上,由所述过渡皮带机构输送到所述返料皮带机构上,再送回所述给料斗,然后进入所述反击式破碎机构重新破碎;符合要求较小粒度的物料,穿过所述振动筛机构的筛面落到所述成品皮带机构上,由所述成品皮带机构输送至所述基体骨架前方堆放;所述除铁器机构设置在主皮带机构上端,用于分离所述主皮带机构的主皮带上物料中的铁块,并输送到所述基体骨架的一侧堆放;
所述控制中心系统设置在所述基体骨架靠近所述动力系统下方,所述控制中心系统通过有线网络或无线网络与远程控制端系统相连接。
反击式破碎机构的破碎机口长×宽为1330×745mm,最大进料粒度为450mm,破碎机功率220kw,所述给料机的长×宽为4000×1300mm,所述给料斗的料斗容积为5m
所述基体骨架四周设置有多个具有调节远近的第一实时反馈摄像装置,所述第一实时反馈摄像装置用于实时反馈所述左履带和右履带行走的路况情况,并与所述控制中心系统电性连接,能够进行无线远程控制。
所述控制中心系统包括安全运行模块,所述安全运行模块用于所述给料系统、破碎系统、动力系统、输送系统、行走系统和液压系统的运行参数实时反馈,以及用于各部件保养信息记录和提醒,以确保所述移动反击式破碎站的安全使用。
所述控制中心系统包括声光预警模块,所述声光预警模块用于所述给料系统、破碎系统、动力系统、输送系统、行走系统和液压系统的运行参数超过预设值时,所述控制中心系统经二次检测确定后,所述移动反击式破碎站能够发出警报提示,同时依次停止所述移动反击式破碎站的各个系统运转,待问题解决后,才能重新启动。
所述主皮带机构、成品皮带机构、返料皮带机构、过渡皮带机构分别设置有用于物料重量反馈的压力传感器,其中设置在所述成品皮带机构的压力传感器用于实时反馈所述成品皮带机构上的物料重量产能信息,所述物料重量产能信息反馈给所述控制中心系统,用于单日或单月产能报表的汇总。
所述除铁器机构上设置有第二实时反馈摄像装置,所述第二实时反馈摄像装置用于监控工作过程的物料破碎速度,所述给料斗上设置有料位传感器,所述料位传感器用于实时反馈料斗中物料高低信息,所述第二实时反馈摄像装置和所述料位传感器分别与所述控制中心系统电性连接。
所述控制中心系统还包括远程控制传送模块,将行走的路况情况、各个系统的运行参数、各部件保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息,通过所述远程控制传送模块传输到所述远程控制端系统。
所述远程控制端系统包括触摸屏,所述触摸屏显示所述远程控制传送模块,将行走的路况情况、各个系统的运行参数、各部件保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息,通过所述远程控制端系统能够控制移动反击式破碎站的行走和物料破碎工作。
所述远程控制端系统与多个所述移动反击式破碎站相连接,实现各个所述移动反击式破碎站的行走的路况情况、运行参数、保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息的实时反馈。
本发明有益效果有以下几方面:
(1)本发明的移动反击式破碎站,所述移动反击式破碎站包括给料系统、破碎系统、动力系统、输送系统、行走系统、液压系统、基体骨架和控制中心系统,所述动力系统和液压系统都设置在动力箱内,所述基体骨架为船型结构,所述行走系统包括左履带和右履带,所述左履带和右履带位于所述基体骨架中间底部的左右两侧,所述动力系统通过热能最终转化为液压能,并通过所述液压系统驱动所左履带和右履带实现行走作业;所述基体骨架上部从一端到另一端依次设置有给料系统、破碎系统、动力系统和输送系统;所述给料系统包括给料斗和给料机,所述给料斗的出口处设置有用于物料振动进料的给料机,所述给料机为采用变频器控制的振动驱动电机;所述破碎系统包括反击式破碎机构,所述反击式破碎机构通过所述液压系统调整排料口宽窄以适应不同物料出料粒度需求;所述输送系统包括主皮带机构、成品皮带机构、返料皮带机构、过渡皮带机构、振动筛机构、除铁器机构和侧皮带机构,所述侧皮带机构设置在所述给料机下方,工作时,待破碎物料经过所述反击式破碎机构破碎后落到所述主皮带机构上,由所述主皮带机构输送至所述振动筛机构进行振动筛分,不符合要求较大粒度的物料,通过所述振动筛机构的筛面上拋落在所述过渡皮带机构上,由所述过渡皮带机构输送到所述返料皮带机构上,再送回所述给料斗,然后进入所述反击式破碎机构重新破碎;符合要求较小粒度的物料,穿过所述振动筛机构的筛面落到所述成品皮带机构上,由所述成品皮带机构输送至所述基体骨架前方堆放;所述除铁器机构设置在主皮带机构上端,用于分离所述主皮带机构的主皮带上物料中的铁块,并输送到所述基体骨架的一侧堆放;各个机构整体布局合理,节约空间,流水线破碎作业,自动化程度高,通性强等优点。
(2)反击式破碎机构的破碎机口长×宽为1330×745mm,最大进料粒度为450mm,破碎机功率220kw,所述给料机的长×宽为4000×1300mm,所述给料斗的料斗容积为5m
(3)所述基体骨架四周设置有多个具有调节远近的第一实时反馈摄像装置,所述第一实时反馈摄像装置用于实时反馈所述左履带和右履带行走的路况情况,并与所述控制中心系统电性连接,能够进行无线远程控制,可知,通过第一实时反馈摄像装置,能够实现远程自动控制行走,无需现场驾驶人员操作,节约成本,提交企业利润等优点。
(4)所述控制中心系统包括安全运行模块,所述安全运行模块用于所述给料系统、破碎系统、动力系统、输送系统、行走系统和液压系统的运行参数实时反馈,以及用于各部件保养信息记录和提醒,以确保所述移动反击式破碎站的安全使用;所述控制中心系统包括声光预警模块,所述声光预警模块用于所述给料系统、破碎系统、动力系统、输送系统、行走系统和液压系统的运行参数超过预设值时,所述控制中心系统经二次检测确定后,所述移动反击式破碎站能够发出警报提示,同时依次停止所述移动反击式破碎站的各个系统运转,待问题解决后,才能重新启动;可知,通过安全运行模块和声光预警模块设置,并与所述远程控制端系统电性连接,实现远程安全操作控制和报警,提高了安全操作等优点。
(5)所述控制中心系统还包括远程控制传送模块,将行走的路况情况、各个系统的运行参数、各部件保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息,通过所述远程控制传送模块传输到所述远程控制端系统。所述远程控制端系统包括触摸屏,所述触摸屏显示所述远程控制传送模块,将行走的路况情况、各个系统的运行参数、各部件保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息,通过所述远程控制端系统能够控制移动反击式破碎站的行走和物料破碎工作。所述远程控制端系统与多个所述移动反击式破碎站相连接,实现各个所述移动反击式破碎站的行走的路况情况、运行参数、保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息的实时反馈,综上所述,实现本发明的移动反击式破碎站的智能自动控制,现场无需工作人员单独操作,多个破碎站同时工作时,各个破碎站的工作信息、安全信息、实时工作信息能够交互分享,公司管理层能够实时了解公司所有破碎站工作情况,维护情况,每日、每月或每年产能情况,维护人员不到现场也能了解各个破碎站保养情况等优点。
附图说明
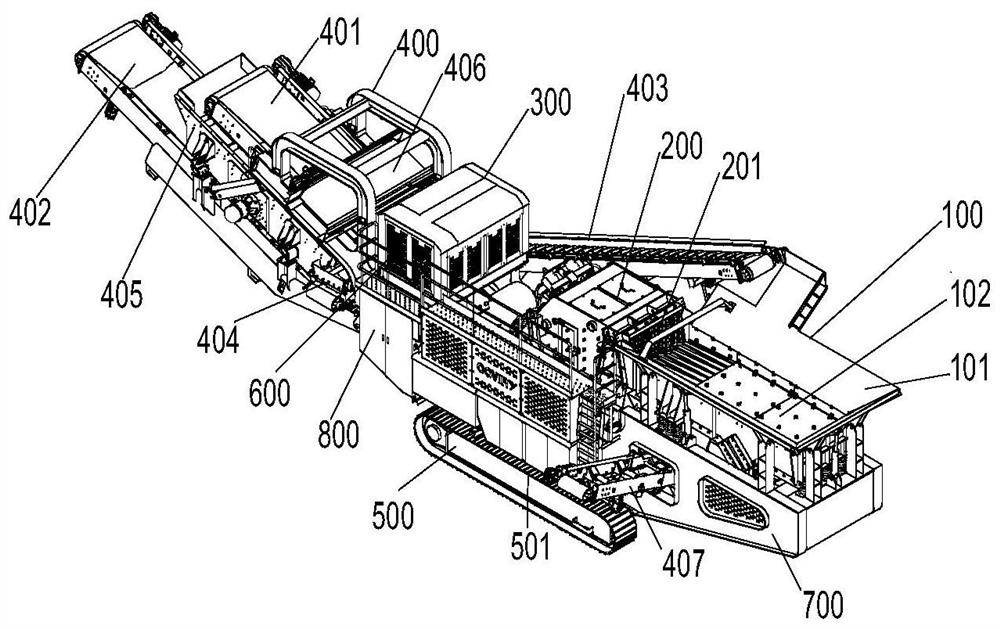
图1为本发明移动反击式破碎站的工作状态下的立体结构示意图;
图2为本发明移动反击式破碎站的工作状态下的前侧面示意图;
图3为本发明移动反击式破碎站的工作状态下的后侧面示意图;
图4为本发明移动反击式破碎站的工作状态下的行走系统示意图;
图5为本发明移动反击式破碎站的运输状态下的结构立体示意图;
图6为本发明移动反击式破碎站的保养状态下的立体结构示意图;
图7为本发明移动反击式破碎站的保养状态下的前侧面示意图;
图8为本发明移动反击式破碎站的保养状态下的后侧面示意图;
图9为本发明移动反击式破碎站的保养状态下的俯视示意图
其中:
100为给料系统,101为给料斗,102为给料机;200为破碎系统,201为反击式破碎机构;300为动力系统;400为输送系统,401为主皮带机构,402为成品皮带机构,403为返料皮带机构,404为过渡皮带机构,405为振动筛机构,406为除铁器机构,407为侧皮带机构;500为行走系统,501为左履带,502为右履带;600为液压系统;700为基体骨架;800为控制中心系统。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。
实施例:如图1-9,一种移动反击式破碎站,移动反击式破碎站包括给料系统100、破碎系统200、动力系统300、输送系统400、行走系统500、液压系统600、基体骨架700和控制中心系统800,动力系统300和液压系统600都设置在动力箱内,基体骨架700为船型结构,行走系统500包括左履带501和右履带502,左履带501和右履带502位于基体骨架700中间底部的左右两侧,动力系统300通过热能最终转化为液压能,并通过液压系统600驱动所左履带501和右履带502实现行走作业;
基体骨架700上部从一端到另一端依次设置有给料系统100、破碎系统200、动力系统300和输送系统400;给料系统100包括给料斗101和给料机102,给料斗101的出口处设置有用于物料振动进料的给料机102,给料机102为采用变频器控制的振动驱动电机;破碎系统200包括反击式破碎机构201,反击式破碎机构201通过液压系统600调整排料口宽窄以适应不同物料出料粒度需求;
输送系统400包括主皮带机构401、成品皮带机构402、返料皮带机构403、过渡皮带机构404、振动筛机构405、除铁器机构406和侧皮带机构407,侧皮带机构407设置在给料机102下方,工作时,待破碎物料经过反击式破碎机构201破碎后落到主皮带机构401上,由主皮带机构401输送至振动筛机构405进行振动筛分,不符合要求较大粒度的物料,通过振动筛机构405的筛面上拋落在过渡皮带机构404上,由过渡皮带机构404输送到返料皮带机构403上,再送回给料斗101,然后进入反击式破碎机构201重新破碎;符合要求较小粒度的物料,穿过振动筛机构405的筛面落到成品皮带机构402上,由成品皮带机构402输送至基体骨架700前方堆放;除铁器机构406设置在主皮带机构401上端,用于分离主皮带机构401的主皮带上物料中的铁块,并输送到基体骨架700的一侧堆放;
控制中心系统800设置在基体骨架700靠近动力系统300下方,控制中心系统800通过有线网络或无线网络与远程控制端系统相连接。
反击式破碎机构201的破碎机口长×宽为1330×745mm,最大进料粒度为450mm,破碎机功率220kw,给料机102的长×宽为4000×1300mm,给料斗101的料斗容积为5m
基体骨架700四周设置有多个具有调节远近的第一实时反馈摄像装置,第一实时反馈摄像装置用于实时反馈左履带501和右履带502行走的路况情况,并与控制中心系统800电性连接,能够进行无线远程控制。
控制中心系统800包括安全运行模块,安全运行模块用于给料系统100、破碎系统200、动力系统300、输送系统400、行走系统500和液压系统600的运行参数实时反馈,以及用于各部件保养信息记录和提醒,以确保移动反击式破碎站的安全使用。
控制中心系统800包括声光预警模块,声光预警模块用于给料系统100、破碎系统200、动力系统300、输送系统400、行走系统500和液压系统600的运行参数超过预设值时,控制中心系统800经二次检测确定后,移动反击式破碎站能够发出警报提示,同时依次停止移动反击式破碎站的各个系统运转,待问题解决后,才能重新启动。
主皮带机构401、成品皮带机构402、返料皮带机构403、过渡皮带机构404分别设置有用于物料重量反馈的压力传感器,其中设置在成品皮带机构402的压力传感器用于实时反馈成品皮带机构402上的物料重量产能信息,物料重量产能信息反馈给控制中心系统800,用于单日或单月产能报表的汇总。
除铁器机构406上设置有第二实时反馈摄像装置,第二实时反馈摄像装置用于监控工作过程的物料破碎速度,给料斗101上设置有料位传感器,料位传感器用于实时反馈料斗中物料高低信息,第二实时反馈摄像装置和料位传感器分别与控制中心系统800电性连接。
控制中心系统800还包括远程控制传送模块,将行走的路况情况、各个系统的运行参数、各部件保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息,通过远程控制传送模块传输到远程控制端系统。
远程控制端系统包括触摸屏,触摸屏显示远程控制传送模块,将行走的路况情况、各个系统的运行参数、各部件保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息,通过远程控制端系统能够控制移动反击式破碎站的行走和物料破碎工作。
远程控制端系统与多个移动反击式破碎站相连接,实现各个移动反击式破碎站的行走的路况情况、运行参数、保养信息、警报提示、物料重量产能信息、物料破碎速度以及料斗中物料高低信息的实时反馈。
本发明有益效果有以下几方面:本发明的移动反击式破碎站,移动反击式破碎站包括给料系统、破碎系统、动力系统、输送系统、行走系统、液压系统、基体骨架和控制中心系统,动力系统和液压系统都设置在动力箱内,基体骨架为船型结构,行走系统包括左履带和右履带,左履带和右履带位于基体骨架中间底部的左右两侧,动力系统通过热能最终转化为液压能,并通过液压系统驱动所左履带和右履带实现行走作业;基体骨架上部从一端到另一端依次设置有给料系统、破碎系统、动力系统和输送系统;给料系统包括给料斗和给料机,给料斗的出口处设置有用于物料振动进料的给料机,给料机为采用变频器控制的振动驱动电机;破碎系统包括反击式破碎机构,反击式破碎机构通过液压系统调整排料口宽窄以适应不同物料出料粒度需求;输送系统包括主皮带机构、成品皮带机构、返料皮带机构、过渡皮带机构、振动筛机构、除铁器机构和侧皮带机构,侧皮带机构设置在给料机下方,工作时,待破碎物料经过反击式破碎机构破碎后落到主皮带机构上,由主皮带机构输送至振动筛机构进行振动筛分,不符合要求较大粒度的物料,通过振动筛机构的筛面上拋落在过渡皮带机构上,由过渡皮带机构输送到返料皮带机构上,再送回给料斗,然后进入反击式破碎机构重新破碎;符合要求较小粒度的物料,穿过振动筛机构的筛面落到成品皮带机构上,由成品皮带机构输送至基体骨架前方堆放;除铁器机构设置在主皮带机构上端,用于分离主皮带机构的主皮带上物料中的铁块,并输送到基体骨架的一侧堆放;各个机构整体布局合理,节约空间,流水线破碎作业,自动化程度高,通性强等优点。另外,反击式破碎机构的破碎机口长×宽为1330×745mm,最大进料粒度为450mm,破碎机功率220kw,给料机的长×宽为4000×1300mm,给料斗的料斗容积为5m
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 一种集破碎和筛分一体的反击式移动破碎站
- 一种移动反击式破碎站