一种攀爬训练模拟装置及控制方法
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及体育器械,具体涉及一种攀爬训练模拟装置及控制方法。
背景技术
攀岩是一项专业的体育运动,需要经过长期专业的专项训练,目前的训练方式包括在真实的野外岩体上进行攀爬训练,或者在一面高大的垂直墙体或人造岩体上安装支撑模块,然后进行训练,野外训练比较麻烦,一是合适的岩体一般远离生活区域,来去不便,并受天气影响较大,且成本高。在人造岩体上训练虽然可以克服上述弊端,但人造岩体构建成本高、占地大、需要专门的场地,实际上相对于其他体育设施非常稀少,严重影响了该项体育运动的推广和发展,并且所有人造岩体的高度受限,很难模拟数十米以上的岩体攀爬。现有技术中还出现一种攀爬模拟装置,是一种类似循环转动的扶梯,人在扶梯上向上行走,这种装置只能模拟攀爬楼梯的情形,而且在向上行走的过程中,扶梯还在不停的向下循环移动,导致实际步间高度差和楼梯存在差异,并且其手部是扶在固定的栏杆上,整个运动姿态和真实体验和实际攀岩的情形更加相去甚远。
发明内容
为解决上述问题,本发明的目的在于提供一种攀爬模拟训练装置及其控制方法,可以在有限的空间内实现无限空间的模拟攀爬训练。
为达到上述目的,本发明的技术方案是:
一种攀爬模拟训练装置,所述攀爬模拟训练装置包括:
至少一个支撑组件,每个支撑组件设有支撑部,用于为手部和/或脚部提供支撑;所述支撑部可以移动改变其位置。
我们知道,人体向上攀爬时,需要不断借助更高处的支撑物或支撑点,一步一步向上攀爬,现有技术中,在一定高度的垂直支架、墙体或人造岩体上的不同高度设置错落有致的支撑点,这些支撑点是固定不动的,为了达到训练的目的,通常垂直支架、墙体或人造岩体的高度要达到10米以上,但攀岩高度也受限于垂直支架、墙体或人造岩体的高度,受场地及成本的限制,垂直支架、墙体或人造岩体不可能做得很高,因此实际训练和在野外岩体上攀爬的感受差别很大,需要不断的做折返,无法一气呵成的完成几十米、几百米高度的训练。为了解决这一问题,本发明创造性的设置了可以移动改变其位置的支撑部,这样,对于四肢攀爬项目,可以采用4个支撑部(或更多个支撑部),设置在一个垂直或有一定倾角的支架或墙体上(人造岩体也可以),四个支撑部的初始位置可设置为适合人体攀爬上墙体或支架上,并受这些支撑部支撑,当人体需要向上攀爬时,一般是先释放一只手,以便伸展身体让这只手向上攀上更高处的支撑点,然后再释放另一侧的脚部,该脚部向上寻找到更高处的一个支撑点,然后释放另一只手,向上攀上更高处的支撑点,然后再释放另一侧的脚部,该脚部向上寻找到更高处的一个支撑点,如此循环,当然,也可能根据个人的习惯或其他要求,以其他顺序来向上攀爬,为了达到本发明的目的,每个支撑部可以移动改变其位置,因此,在人体在攀爬时,可以根据需要或设定,实时调控各支撑部之间的相对位置,使其移动到需要的位置,以符合攀岩训练的需要,并贴合真实环境中攀岩的情形。
例如,当手部或脚部离开支撑部时,对应的支撑部向上移动到预设的位置;相当于原来那个支撑部(支撑点)消失了,在更高处出现了一个新的支撑部(支撑点)。
或,依然受手部和/或脚部压力的对应的支撑部向下移动;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动,同时,依然受手部和/或脚部压力的对应的支撑部向下移动;
然后,当之前离开支撑部的手部和/或脚部重新攀上原来对应的支撑部,并稳定后,原来接触支撑部的手部或脚部离开对应的支撑部继续向上攀爬,对应的支撑部向上移动到预定位置;
或,依然受手部和/或脚部压力的对应的支撑部向下移动到预定位置;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动预定位置,同时,依然受手部和/或脚部压力的对应的支撑部向下移动到预定位置;
不论各支撑部如何配合移动,就是要保证每次开始向上攀援前,承受人体重量的支撑部位于未承受人体重量的支撑部的下方(手部支撑部相对于手部支撑部,脚部支撑部相对于脚部支撑部)。
如此往复运动。
或者,所有的支撑部安装在一个循环传送装置上,在面对使用者的正面,支撑部一直由上往下循环移动,使得人体可以在循环传送装置上不断向上攀爬,但实际的活动范围被控制在循环传送装置的正面高度范围内。
支撑部相互之间具有一定的距离(根据适宜人体攀爬的原则设定或可调整的设置,纵向方向(高度方向)本身支撑部组件就可以实现支撑部的高度调整(可以设置将支撑部固定到垂直支架、墙体等支撑结构上的连接固定组件及高度调整组件),并且在支撑部组件安装时还可以调整支撑部组件相互间的位置,而在水平方向可以再根据需要设置可以调整整个支撑部组件或单独调整支撑部横向移动的水平横移调整装置,前者安装在垂直支架、墙体等支撑结构上,支撑部组件再安装到水平横移调整组件上;后者是将水平横移调整组件安装在支撑部与将支撑部固定到垂直支架、墙体等支撑结构上的连接固定组件及高度调整组件之间,实现高度位置调整的同时,具有水平横移的功能。
上述的各种运动组合的共同点,都是控制不同的支撑部在限定的高度(或空间范围)内,相对位置做周而复始的往复运动,从而在有限的高度范围内,模拟实现了高度方向支撑点的不断更新,使得持续向上攀援成为可能。
因此,本发明创造性的在有限的空间距离上实现了无限空间距离的训练(如果你可以不休息的话)。这样,可以方便的根据需要制定不同的训练计划,比如攀爬垂直高度设定为10m、20m、50m、100m……1000m,甚至更多,只要你需要。
进一步的,每个所述支撑部通过直线移动和/或曲线运动改变其相对于地面的高度。
根据训练要求的复杂程度,以及对真实环境的模拟需求不同,可以构建支撑部只能在垂直方向直线往复运动、在同一平面上做自由运动(X、Y坐标可以同时改变或单独改变其中一个坐标值)、或在一个立体空间中进行移动(X、Y、Z三个坐标值可以同时改变或改变其中任一一个或两个坐标值)。图1到图3所示是支撑部只做直线运动以改变垂直高度的实施方式。为了满足更加复杂的攀岩模拟,可以对支撑部加入横向移动机构(和墙面平行的水平线方向),使得可以实现在同一平面上做自由运动(X、Y坐标可以同时改变或单独改变其中一个坐标值)。也可以增设水平方向(与墙面垂直的方向)的伸缩运动机构,可以实现在Y和Z的两个坐标的联动调整,实现在一个垂直于水平面的平面上的曲线变化轨迹。或者同时增设横向移动机构和伸缩运动机构,可以实现支撑部在一个立体空间中的直线或曲线移动(X、Y、Z三个坐标值可以同时改变或改变其中任一一个或两个坐标值)。
进一步的,所述攀爬模拟训练装置包括至少一个训练单元,每个训练单元包括两个支撑组件:左脚支撑组件和右脚支撑组件,还包括至少一个固定或高度可调的手部攀援部件,所述手部攀援组件设置于支撑组件的上方;或者,每个训练单元包括以下支撑组件:左手支撑组件、右手支撑组件、左脚支撑组件和右脚支撑组件,所述左手支撑组件和右手支撑组件设置于左脚支撑组件和右脚支撑组件的上方。
进一步的,所述支撑组件还包括:
连接部,一端与支撑部连接或一体成型;
所述攀爬模拟训练装置还包括驱动装置,所述驱动装置设有高度调整组件,高度调整组件与连接部传动连接,带动连接部做直线移动和/或曲线运动改变其相对于地面的高度。
进一步的,所述驱动组件包括还设有跨度调整装置,用于调整不同支撑部之间的初始距离。
进一步的,所述高度调整组件包括液压和/或气压组件,所述连接部与液压或气压组件连接,液压和/或气压组件驱动所述连接部做往复运动;或者,所述高度调整组件包括直线电机驱动组件、电机及螺杆驱动组件、电机及导向轮及同步带组件、电磁驱动组件中的一种或两种及两种以上的组合,所述连接部与高度调整组件连接,高度调整组件驱动所述连接部做往复运动。
进一步的,所述高度调整组件包括直线电机驱动组件、电机及螺杆驱动组件、电磁驱动组件中的一种或两种及两种以上的组合,所述连接部与高度调整组件连接,高度调整组件驱动所述连接部做往复运动。
进一步的,所述跨度调整装置包括直线电机驱动组件、电机及螺杆驱动组件、电机及导向轮及同步带组件、电磁驱动组件中的一种或两种及两种以上的组合。
进一步的,一个支撑组件设置有两个或两个以上的支撑部及其对应的连接部。
进一步的,所述高度调整组件由两个气缸或液压缸来组成,包括上气缸或上液压缸,和上活塞;下气缸或下液压缸,和下活塞;上下活塞连接同一活塞杆,活塞杆与连接部固定连接,上、下气缸或上、下液压缸共同推动连接部和支撑部做上下往复运动。
进一步的,攀爬模拟训练装置还设有伸缩调整装置,所述伸缩调整装置设置于连接部和支撑部之间,该伸缩调整装置一端与连接部固定连接,一端与支撑部连接,用于连接支撑部和连接部,并对连接部起支撑作用,同时驱动支撑部远离或靠近连接部。
进一步的,所述高度调整组件的下方传动连接一个初始位置调整装置,用以推动整个高度调整组件及支撑部一起上下移动,用以作为调整不同支撑部之间的初始距离。
进一步的,所述初始位置调整装置为电机螺杆系统,包括电机、轴承和丝杆,电机带动丝杆转动,丝杆推动整个高度调整组件及支撑部一起上下移动,用以作为调整不同支撑部之间的初始距离。
进一步的,所述攀爬模拟训练装置包括至少一个支撑组件和对应的驱动装置,所述驱动装置包括导轨和高度调整装置,所述支撑组件滑动安装于导轨上,并可以沿导轨往复滑动,所述高度调整组件包括电机及导向轮及同步带组件,所述电机为外转子电机,所述电机的定子固定连接于支架的一端,所述导向轮装设于支架的另一端,所述同步带同时绕设在外转子和导向轮上,并且同步带与支撑组件固定连接,所述导轨的长轴方向与电机的转轴垂直或基本垂直,外转子的旋转带动同步带运动,同步带带动支撑组件在导轨上往复运动。
进一步的,所述攀爬模拟训练装置包括一个支撑组件、导轨、支架和高度调整装置,所述支撑组件滑动安装于导轨上,并可以沿导轨往复滑动,所述高度调整组件包括电机及导向轮及同步带组件,所述电机为外转子电机,所述电机的定子固定连接于支架的一端,所述导向轮装设于支架的另一端,所述同步带同时绕设在外转子和导向轮上,并且同步带与支撑组件固定连接,所述导轨的长轴方向与电机的转轴垂直或基本垂直,外转子的旋转带动同步带运动,同步带带动支撑组件在导轨上往复运动。
进一步的,所述支撑组件包括一个循环传动的传送装置,所述循环传送装置的表面安装所述支撑部,在面向使用者一侧的正面,循环传送装置带动支撑部由高处向低处移动,并经背向一侧由低处向高处移动,最终又从面向使用者一侧的正面的高处出现并向低处移动,如此循环往复。
本发明还提供一种攀爬模拟训练装置的控制方法,包括以下步骤:
第一步,构建至少可以上下往复运动并为手部和/或脚部提供支撑的支撑部;支撑部之间具有距离,这个距离可以是固定的适宜于攀爬的距离,也可以采用可调整的方式根据需要调整;
第二步,当人体攀爬上支撑部并稳定后,人体继续向上攀爬,当手部或脚部离开支撑部时,对应的支撑部向上移动;
或,依然受手部和/或脚部压力的对应的支撑部向下移动;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动,同时,依然受手部和/或脚部压力的对应的支撑部向下移动;
第三步,当之前离开支撑部的手部和/或脚部重新攀上原来对应的支撑部,并稳定后,原来接触支撑部的手部或脚部离开对应的支撑部继续向上攀爬,对应的支撑部向上移动;
或,依然受手部和/或脚部压力的对应的支撑部向下移动;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动,同时,依然受手部和/或脚部压力的对应的支撑部向下移动;
如此往复运动。
本发明还提供一种攀爬模拟训练装置的控制方法,包括以下步骤:
第一步,构建至少可以上下往复运动并为手部和/或脚部提供支撑的支撑部;支撑部之间具有距离,这个距离可以是固定的适宜于攀爬的距离,也可以采用可调整的方式根据需要调整;
第二步,当人体攀爬上支撑部并稳定后,其中一个或两个支撑部向上移动到预定位置,此时人体的重量施加在未移动的支撑部上;
第三步,然后人体攀上向上移动到预定位置的支撑部,并将人体重量转移施加到向上移动到预定位置的支撑部上,稳定后,承受人体重量的支撑部向下移动到预定位置,同时,原来未移动的支撑部向上移动到预定位置;
第四步,等所有支撑部都到达预定位置并稳定后,承受人体重量的支撑部位于低位,未承受人体重量的支撑部位于高位,此时人体可以再次向处于高位的支撑部攀爬;
如此重复第三步和第四步的动作,模拟攀岩的动作。
因此,本发明创造性的在有限的空间距离上实现了无限空间距离的训练(如果你可以不休息的话)。这样,可以方便的根据需要制定不同的训练计划,比如攀爬垂直高度设定为10m、20m、50m、100m……1000m,甚至更多,只要你需要。
附图说明
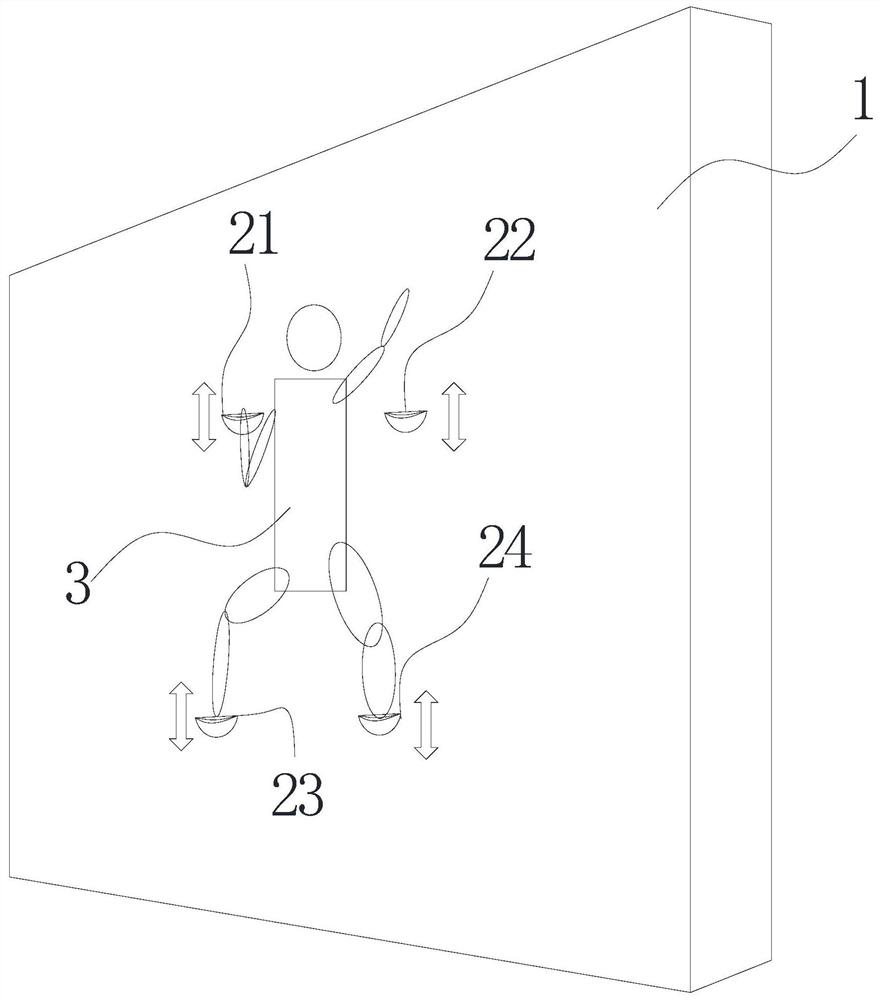
图1、图2和图3是本发明的示意图;
图4和图5、图6是支撑部及其驱动装置的三种实施例示意图;
图7是本发明另一种实现的示意图。
图中数字和字母所表示的相应部件名称:
墙体1;左手支撑部21;右手支撑部222;左脚支撑部23;右脚支撑部24;人体3;连接部231;支架或导轨236;上轴承235;下轴承234;丝杆232;电机233;上气缸2371;上活塞2372;下气缸2381;下活塞2382;活塞杆2321;同步带42;同步带驱动装置4;张紧轮41;垂直支架正面11侧;垂直支架的背面12;支撑部2;传送带5;传送带驱动装置6。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细的说明。
为达到上述目的,本发明的技术方案是:
一种攀爬模拟训练装置,所述攀爬模拟训练装置包括:
至少一个支撑组件,每个支撑组件设有支撑部,用于为手部和/或脚部提供支撑;所述支撑部可以移动改变其位置。
我们知道,人体向上攀爬时,需要不断借助更高处的支撑物或支撑点,一步一步向上攀爬,现有技术中,在一定高度的垂直支架、墙体或人造岩体上的不同高度设置错落有致的支撑点,这些支撑点是固定不动的,为了达到训练的目的,通常垂直支架、墙体或人造岩体的高度要达到10米以上,但攀岩高度也受限于垂直支架、墙体或人造岩体的高度,受场地及成本的限制,垂直支架、墙体或人造岩体不可能做得很高,因此实际训练和在野外岩体上攀爬的感受差别很大,需要不断的做折返,无法一气呵成的完成几十米、几百米高度的攀援训练。为了解决这一问题,本发明创造性的设置了可以移动改变其位置的支撑部,这样,对于四肢攀爬项目,可以采用4个支撑部(或更多个支撑部)如图1和图2所示,设置在一个垂直或有一定倾角的支架或墙体1上(人造岩体也可以),四个支撑部(如图1和图2所示,包括左手支撑部21、右手支撑部22、左脚支撑部23、右脚支撑部24)的初始位置可设置为方便人体攀爬到墙体或支架上,并受这些支撑部支撑,人体3可以先调整4个支撑部到合适的初始位置及相互间的距离(当然为节约成本,可以省略初始位置调整装置),然后人体3攀爬上这些支撑部,左脚右脚分别攀上左脚支撑部23、右脚支撑部24,左手和右手分别攀上左手支撑部21和右手支撑部22,当人体3需要向上攀爬时,一般是先释放一只手,以便伸展身体让这只手向上攀上更高处的支撑点,然后再释放另一侧的脚部,该脚部向上寻找到更高处的一个支撑点,然后释放另一只手,向上攀上更高处的支撑点,然后再释放另一侧的脚部,该脚部向上寻找到更高处的一个支撑点,如此循环,当然,也可能根据个人的习惯或其他要求,以其他顺序来向上攀爬,为了达到本发明的目的,每个支撑部可以移动改变其位置,因此,在人体在攀爬时,可以根据需要或设定,实时调控各支撑部之间的相对位置,使其移动到需要的位置,以符合攀岩训练的需要,并贴合真实环境中攀岩的情形。
例如,当手部或脚部离开支撑部时,对应的支撑部向上移动到预设的位置;相当于原来那个支撑部(支撑点)消失了,在更高处出现了一个新的支撑部(支撑点)。
或,依然受手部和/或脚部压力的对应的支撑部向下移动;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动,同时,依然受手部和/或脚部压力的对应的支撑部向下移动;
然后,当之前离开支撑部的手部和/或脚部重新攀上原来对应的支撑部,并稳定后,原来接触支撑部的手部或脚部离开对应的支撑部继续向上攀爬,对应的支撑部向上移动到预定位置;
或,依然受手部和/或脚部压力的对应的支撑部向下移动到预定位置;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动预定位置,同时,依然受手部和/或脚部压力的对应的支撑部向下移动到预定位置;
不论各支撑部如何配合移动,就是要保证每次开始向上攀援前,承受人体重量的支撑部位于未承受人体重量的支撑部的下方(手部支撑部相对于手部支撑部,脚部支撑部相对于脚部支撑部)。
如此往复运动。
如图1所示,人体3已经攀上处于初始位置的4个支撑部(标号21/22/23/24),然后人体3释放右手向上攀爬,此时,右手支撑部22会向上移动到合适右手下一步攀爬的位置(支撑部的移动可以由定时器或软件系统根据设定进行控制,也可以采用压力、电容、或光电等传感器实时检测人体四肢的动作,然后控制对应的支撑部移动,也可以根据个人实际攀爬的适宜的时间周期进行控制),此时相当于初始位置的支撑部(支撑点)消失了,新的支撑点出现在上方适合右手攀爬的地方,然后右手攀爬上出现在新位置的右手支撑部22,然后,人体可以释放右脚并使其向上抬举,此时对应的右脚支撑部24会移动到上方合适右脚踩踏的位置,然后右脚踏上右脚支撑部24,右脚受到右脚支撑部24支撑后,人体会将重心向右侧移动,将整个人体的重量转移到右手支撑部22和右脚支撑部24上,然后释放左手及左脚(同时或不同时间),其对应的左手支撑部21和左脚支撑部23会向上移动到预定的位置,当左手左脚攀上出现在新位置的左手支撑部21和左脚支撑部23时,四个支撑部同时下降,为下一循环的攀爬创造出运动空间(为节约成本,4个支撑部的往复移动的距离可以只做到一个攀爬跨度的距离,也可以是两个或两个跨度以上)。
或者,在释放左手及左脚(同时或不同时间),其对应的左手支撑部21和左脚支撑部23向上移动的同时,为了节约成本,缩短支撑部可移动的范围(长度),控制右手支撑部22和右脚支撑部24同步下降,利用相对高度的变化,实现对4个支撑部在一段有限的垂直高度范围内高度交替上升和下降,使得人体可以在一端有限的垂直高度空间内不断完成向上攀爬的过程,每完成一次四肢的交替向上攀爬的循环,就等于向上攀爬了一个距离单元,这个距离单元的长度可以计算,累计下来,就可以实时测得人体完成攀爬训练的垂直高度。
其中图2所示是右手和右脚一起或先后向上攀援,然后左手和左脚一起或先后向上攀援的情形。
图3是右手和左脚一起或先后向上攀援,然后才是左手和右脚一起或先后向上攀援,完成一个循环的情形。这个可以根据个人的习惯设定,也可以根据传感器检测到四肢的动作(压力消失与否、接触的消失与否、或视觉图像等参数判断手部或脚部是否离开支撑部)来控制所有支撑部的运行。当传感器检测到手部或脚部离开(释放)对应的支撑部后,系统控制对应的支撑部移动到新的位置。
因此,本发明创造性的在有限的空间距离上实现了无限空间距离的训练(如果你可以不需要休息的话)。这样,可以方便的根据需要制定不同的训练计划,比如攀爬垂直高度设定为10m、20m、50m、100m……1000m,甚至更多,只要你需要。
支撑部相互之间具有一定的距离(根据适宜人体攀爬的原则设定或可调整的设置,纵向方向(高度方向)本身支撑部组件就可以实现支撑部的高度调整(可以设置将支撑部固定到垂直支架、墙体等支撑结构上的连接固定组件及高度调整组件),并且在支撑部组件安装时还可以调整支撑部组件相互间的位置,而在水平方向可以再根据需要设置可以调整整个支撑部组件或单独调整支撑部横向移动的水平横移调整装置,前者安装在垂直支架、墙体等支撑结构上,支撑部组件再安装到水平横移调整组件上;后者是将水平横移调整组件安装在支撑部与将支撑部固定到垂直支架、墙体等支撑结构上的连接固定组件及高度调整组件之间,实现高度位置调整的同时,具有水平横移的功能。
以上只是几种控制支撑部如何配合不同攀爬习惯或姿态进行位置的调整,实际应用中,可以根据自身的习惯对每个支撑部的移动方向及移动距离进行精确控制,例如,可以在每一步攀援动作之前设置一个停顿时间,模拟每次攀上一个新的高点,都要停顿一下的实际情形,也可以将连续攀援和间隙停顿混合在一起,以满足不同的训练需要。实现方向及距离的控制技术,现有技术很多,不再赘述。
在实际应用中,每个所述支撑部可以根据需要通过不同驱动装置方案,通过直线移动和/或曲线运动改变其相对于地面的高度。
根据训练要求的复杂程度,以及对真实环境的模拟需求不同,可以构建支撑部只能在垂直方向直线往复运动(只要改变海拔高度即可,移动轨迹包括但不限于垂直于水平面的直线)、在同一平面上做自由运动(X、Y坐标可以同时改变或单独改变其中一个坐标值)、或在一个立体空间中进行移动(X、Y、Z三个坐标值可以同时改变或改变其中任一一个或两个坐标值)。图1到图3所示是支撑部只做直线运动以改变垂直高度的实施方式。为了满足更加复杂的攀岩模拟,可以对支撑部加入横向移动机构(和墙面平行的水平线方向),使得可以实现在同一平面上做自由运动(X、Y坐标可以同时改变或单独改变其中一个坐标值)。也可以增设水平方向(与墙面垂直的方向)的伸缩运动机构,可以实现在Y和Z的两个坐标的联动调整,实现在一个垂直于水平面的平面上的曲线变化轨迹。或者同时增设横向移动机构和伸缩运动机构,可以实现支撑部在一个立体空间中的直线或曲线移动(X、Y、Z三个坐标值可以同时改变或改变其中任一一个或两个坐标值)。上述坐标系,Y代表垂直于水平面的高度方向,X代表平行于水平面且同时平行于墙面的横向方向,Z代表平行于水平面但垂直于墙面的水平伸缩方向。
因此在实际应用中,攀爬模拟训练装置还可以设有伸缩调整装置,用于调整支撑部在Z轴方向的位置,具体实施方式可以是,所述伸缩调整装置设置于连接部和支撑部之间,该伸缩调整装置一端与连接部固定连接,一端与支撑部连接,用于连接支撑部和连接部,并对连接部起支撑作用,同时驱动支撑部远离或靠近连接部。例如,在连接部上安装电机及螺杆装置,螺杆的一端传动连接电机,另一端连接支撑部。也可以采用气缸或液压缸系统来推动支撑部在Z轴方向伸缩。Z轴方向的调整可以增加训练的难度及趣味,更加接近野外山体的实际情况。
在实际应用中,所述支撑组件可以如图4构成,以左脚支撑部组件为例(其余支撑部组件都可以是同样的结构,当然也可以采用不同的结构),包括:
连接部231,一端与支撑部23连接或一体成型;
所述攀爬模拟训练装置还包括驱动装置,所述驱动装置设有高度调整组件,高度调整组件与连接部231传动连接,带动连接部231做直线移动和/或曲线(当设置一个导轨组件,连接部滑动装设在导轨中并沿导轨运动,导轨可以为直线、曲线、或直线与曲线的结合,从而使得支撑部的运动轨迹为直线、曲线、或直线与曲线的组合等)运动改变其相对于地面的高度。图4的示例中,高度调整装置包括支架或导轨236,上轴承235,下轴承234,丝杆232,电机233,电机233带动丝杆232转动,丝杆232带动与丝杆232螺纹连接的连接部231沿丝杆轴向上下往复运动。图6的示例的支撑组件,其高度调整装置采用同步带42(也可以是皮带或链条)及同步带驱动装置4(如可以采用电机驱动辊轮的方式,或直接采用外转子电机驱动同步带的方式等,配合张紧轮41一起工作),图6中,以左脚支撑部组件为例,支撑部安装在同步带42上,并位于垂直支架正面11侧,垂直支架的背面12用于固定在墙壁上或其他支架上,而整个支撑组件(包括左脚支撑部23、左脚连接部231、同步带42、同步带驱动装置4、张紧轮41)通过同步带驱动装置4的转轴(外转子电机时,电机带动辊轮的方式则是轴承座)和张紧轮41的转轴固定连接到垂直支架上。同步带驱动装置4带动同步带42往复运动,则左脚支撑部23及左脚连接部231跟随同步带做上下往复运动,实现本发明根据需要改变支撑部高度位置的要求。
在实际应用中,每个支撑组件既可以单独对应设置一套驱动装置,也可以其中部分或全部支撑组件共用一套驱动装置。
在一些实施例中,一个支撑组件还可以设置两个或两个以上的支撑部及其对应的连接部,使得在驱动装置调整支撑部的行程距离一定的情形下,人体可以有更多的攀援支撑点位(支撑部)可以选择。
在某些实施例中,所述驱动组件包括还设有跨度调整装置,用于调整不同支撑部之间的初始距离。如图5所示,是一种构建示例,高度调整组件由两个气缸(或液压缸)来组成,包括上气缸2371和上活塞2372,下气缸2381和下活塞2382,上下活塞连接同一活塞杆2321,活塞杆2321与连接部231固定连接,上下气缸共同推动连接部231和支撑部23做上下往复运动。这是一种构建高度调整组件的方案,在这个高度调整组件的下方传动连接一个电机螺杆系统,包括电机233、轴承234和丝杆232,电机带动丝杆232转动,丝杆232推动整个高度调整组件及支撑部一起上下移动,用以作为调整不同支撑部之间的初始距离。
在实际应用中,所述高度调整组件可以采用包括液压和/或气压组件构成,所述连接部与液压或气压组件连接,液压和/或气压组件驱动所述连接部做往复运动。
高度调整组件也可以采用包括直线电机驱动组件、电机及螺杆驱动组件、电磁驱动组件中的一种或两种及两种以上的组合构成,所述连接部与高度调整组件连接,高度调整组件驱动所述连接部做往复运动。
所述跨度调整装置也可以采用包括直线电机驱动组件、电机及螺杆驱动组件、电磁驱动组件中的一种或两种及两种以上的组合。
图5只是其中的一种组合方式。
如图7所示,为了降低成本,简化结构,在实际应用中,还有一种实施方案,所述支撑组件包括一个循环传动的传送装置,所述循环传送装置的表面按照攀岩训练的标准安装多个所述支撑部2,在面向使用者一侧的正面,循环传送装置带动支撑部2由高处向低处移动,并经背向一侧由低处向高处移动,最终又从面向使用者一侧的正面的高处出现并向低处移动,如此循环往复。图7的示例中,循环传送装置包括传送带5(也可以采用同步带或其他部件)和传送带驱动装置6(如可以采用电机驱动辊轮的方式,或直接采用外转子电机驱动同步带的方式等,配合张紧轮一起工作),这里支撑部2可直接固定在传送带5的外表面上,省去连接部(也可以保留连接部,连接部固定于传送带5表面,支撑部安装在连接部上),多个支撑部2安装需要的位置分布在传送带5的全部表面上,传送带驱动装置6带动传送带5正转时,面向攀岩者一面(正面)的传送带5是一直由上往下运动的,该运动速度与攀岩者向上攀爬的速度匹配,保证攀岩者始终位于传送带5正面的中间段,利于安全。攀岩者不断的理由支撑部2向上进行攀爬,而传送带5向下的移动抵消了攀爬者向上的位移,使得攀爬者在有限的垂直距离上实现无限距离的攀爬。本实施例的传送带驱动装置6反转时,面向攀爬者一面的传送带5是由下往上运动的,此时可以进行攀爬者由上往下攀岩降落的训练。当然,本发明的其他实施方式,通过反向控制,也可以实现往下攀岩降落的训练。整个支撑组件(包括支撑部2、传送带5、传送带驱动装置6)通过传送带驱动装置6的转轴(为外转子电机时,当采用电机带动辊轮的方式则是轴承座)和张紧轮61的转轴固定连接到一个垂直支架(图中未示出)上,再将垂直支架安装到墙上或固定在地面上。
本发明还提供一种攀爬模拟训练装置的控制方法,包括以下步骤:
第一步,构建至少可以上下往复运动并为手部和/或脚部提供支撑的支撑部;支撑部之间具有距离,这个距离可以是固定的适宜于攀爬的距离,也可以采用可调整的方式根据需要调整;
第二步,当人体攀爬上支撑部并稳定后,人体继续向上攀爬,当手部或脚部离开支撑部时,对应的支撑部向上移动;此时,该支撑部上升到
或,依然受手部和/或脚部压力的对应的支撑部向下移动;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动,同时,依然受手部和/或脚部压力的对应的支撑部向下移动;
第三步,当之前离开支撑部的手部和/或脚部重新攀上原来对应的支撑部,并稳定后,原来接触支撑部的手部或脚部离开对应的支撑部继续向上攀爬,对应的支撑部向上移动;
或,依然受手部和/或脚部压力的对应的支撑部向下移动;
或,对应于不再受到手部和/或脚部压力的支撑部向上移动,同时,依然受手部和/或脚部压力的对应的支撑部向下移动。
如此往复运动。
本发明还提供一种攀爬模拟训练装置的控制方法,包括以下步骤:
第一步,构建至少可以上下往复运动并为手部和/或脚部提供支撑的支撑部;支撑部之间具有距离,这个距离可以是固定的适宜于攀爬的距离,也可以采用可调整的方式根据需要调整;
第二步,当人体攀爬上支撑部并稳定后,其中一个或两个支撑部向上移动到预定位置,此时人体的重量施加在未移动的支撑部上;
第三步,然后人体攀上向上移动到预定位置的支撑部,并将人体重量转移施加到向上移动到预定位置的支撑部上,稳定后,承受人体重量的支撑部向下移动到预定位置,同时,原来未移动的支撑部向上移动到预定位置;
第四步,等所有支撑部都到达预定位置并稳定后,承受人体重量的支撑部位于低位,未承受人体重量的支撑部位于高位,此时人体可以再次向处于高位的支撑部攀爬;
如此重复第三步和第四步的动作,模拟攀岩的动作。
本发明的上述结构方案可以根据上述方法进行控制,实现支撑部按照需要进行位置调整,以满足贴近实际的攀岩训练。
因此,本发明创造性的在有限的空间距离上实现了无限空间距离的训练(如果你可以不停止休息的话)。这样,可以方便的根据需要制定不同的训练计划,比如攀爬垂直高度设定为10m、20m、50m、100m……1000m,甚至更多,只要你需要。
以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种攀爬训练模拟装置及控制方法
- 一种攀爬训练用具有安全防护结构的训练装置