起重机防风控制系统及方法
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及起重机技术领域,尤其涉及一种起重机防风控制系统及方法。
背景技术
随着港口装卸运输业的蓬勃发展,大型港口设备在港口现代化生产中发挥着越来越重要的作用,如门式、门座式起重机,但是由于其结构高大,迎风面积较大,所以在台风或突发性阵风发生时很容易遭受风力袭击,发生倒塌事件,造成人员伤亡及巨大的经济损失。
现有技术起重机防风一般只配备了一种防风制动器,如轮边制动器,在有大风情况时,需要工作人员去主动打开这个防风制动器,进而起到一定的防风功能,但是它有以下缺点:
一、在实际使用过程中,不能根据现场工况进行变化,无法实现其理论设计制动效果;
二、无防风预警功能,无多重制动选择,无联动管理,所以无法满足现场安全管理提升的工作要求。
发明内容
本发明所要解决的技术问题是:提供一种起重机防风控制系统及方法,采用这种防风系统及方法可以实现智能感知以及多重制动。
本发明所采用的技术方案是:一种起重机防风控制系统,它包括起重机,所述起重机上设有第一制动装置,它还包括处理器、设置在起重机上的第二制动装置、用于检测风速的风速传感器以及用于检测起重机移动速度的移速传感器,所述第一制动装置、第二制动装置、风速传感器、移速传感器均与处理器信号连接。
作为优选,它还包括报警装置,所述报警装置与处理器信号连接。
作为优选,它还包括用于探测第二制动装置状态的探测装置,所述探测装置与处理器信号连接。
作为优选,所述第二制动装置为电动轮边制动器。
作为优选,它还包括无线通信模块,所述无线通信模块与处理器信号连接。
作为优选,它还包括图像采集装置,所述图像采集装置与处理器信号连接。
一种起重机防风控制方法,它包括以下步骤:
S1、风速传感器检测风速,若检测到的风速小于X级风力时,继续检测;若风速为X级风力范围时,则跳转到下一步;若风速大于等于Y级风力时,则跳转到步骤S3;
S2、控制报警装置报警,然后返回步骤S1继续检测;
S3、控制报警装置报警,然后控制起重机停止工作,同时控制第一制动装置启动,接着控制移速传感器工作,检测移速,然后跳转到下一步;
S4、若检测到的移速小于Zm/min,则直接启动所有的第二制动装置;若检测到的移速大于等于Zm/min,则需要逐步控制第二制动装置工作。
作为优选,步骤S1还需要检测风向,且步骤S4中逐步控制第二制动装置工作是指:根据步骤S1检测到的风向,从远到近依次启动第二制动装置。
作为优选,步骤S3检测移速前还需要判断是否装有移速传感器,若装有移速传感器则正常检测移速;若没有装移速传感器,则在控制第一制动装置启动3-5秒后,启动第二制动装置。
采用以上结构方法与现有技术相比,本发明具有以下优点:
通过风速传感器来检测风速,通过移速传感器来检测移速,然后根据这个信息来判断起重机的状态,之后通过处理器来分别控制第一制动装置与第二制动装置,进而实现智能防风。
而且当设置多套第二制动装置时,在紧急状态下,实施动态紧急制动,并带有逐点成对释放功能可减小紧急制动时对设备的冲击。
并且远程监视作为可选功能,通过加装无线通信模块,实现移动终端、PC终端等远程监视制动器工作状态。提高安全管理工作效率,降低人工成本。
附图说明
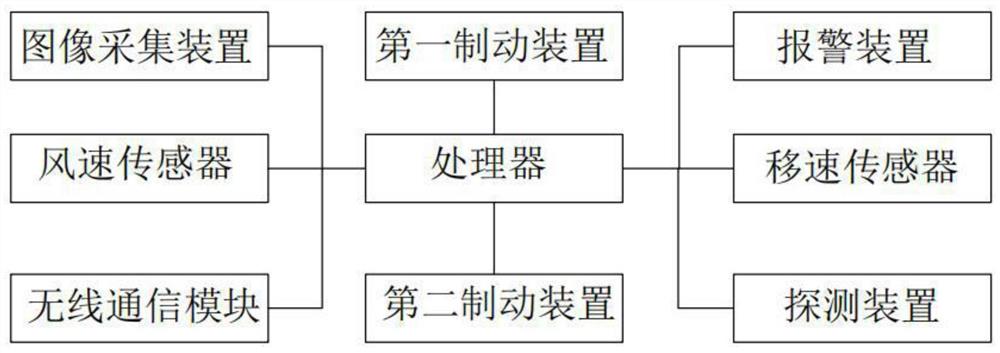
图1为本发明起重机防风控制系统的连接框图。
具体实施方式
以下通过具体实施方式对本发明做进一步描述,但是本发明不仅限于以下具体实施方式。
具体实施例一:一种起重机防风控制系统,用于25T船厂门座起重机,它包括处理器、第一制动装置、第二制动装置、风速传感器、移速传感器、报警装置、探测装置、无线通信模块以及图像采集装置,其中:
第一制动装置为该起重机本身是自带制动装置的,即刹车装置,所以在此不详细展开;
第二制动装置是安装在起重机车轮上的电动轮边制动器,采用电机作为动力源,无需使用液压作为动力源,电动制动效率高、制动力稳定、无液压油管老化弊端,因为市面上电动轮边制动器是有在售的,所以在此没有详细展开电动轮边制动器的具体结构,并且在电动轮边制动器上增加了探测装置,该探测装置主要检测电动轮边制动器的刹车片是否加紧松开,具体是安装在电动轮边制动器的推杆端部,即该传感器为测距传感器,通过检测推杆伸缩量,可确定夹钳的松紧,方便的实现探测功能;而且电动轮边制动器还设置了手动释放机构,即当断电时,可以通过手动的力量来打开电动轮边制动器,该手动释放机构包括电机防护罩与手柄,两者都是可以可拆式安装在电机上的,当不需要手动释放时,可以安装防护罩在电机尾部,保护电机;当需要手动释放时,手动拆下保护罩,将手柄安装在电机尾部转轴上,通过摇动手柄带动电机转轴转动,进而实现松开夹钳;
风速传感器,又称风速仪,安装在起重器上或者起重机周围,主要用于检测起重机周围的风速与风向,这个现有技术市面上有很多在售,所以在此没有详细展开;
移速传感器,可以是起重机自带的,也可以是后期安装上去的,主要用于检测起重机的移动速度,这个也是现有技术比较常规的产品,所以在此也没有详细描述其具体结构与工作原理;
报警装置,可以为声音报警、光线报警或者声光报警,安装在驾驶室,主要是为了提醒司机;
无线通信模块,可以采用3G、4G、5G、WIFI等通信模块,实现无线通信传输功能;
图像采集装置,可以采用普通的摄像头,实现视频监测;
处理器,采用PLC逻辑控制器,来进行控制,这个在工控方面也是比较常规的,在此也没有详细展开;
并且还可以包括一个总控制室,通过无线通信模块将采集到的信号如风速传感器、移速传感器、图像采集装置、探测装置等采集到的信号,传输到总控制室,用户可以直接在总控制室进行远程监测,然后远程控制,即相当于将处理器也可以设置在总控制室内,实现自动控制。
改装前后数据对比如下表1:
可以明显看出加装了电动轮边制动器的起重机的防风效果更好,加装一套提升了大约17%的防风效果,加装两套大约提升了33%的防风效果。
并且,本具体实施例控制时,具有如下的控制方法,
S1、处理器采集风速传感器检测到的风速,若采集到的风速小于6级风力时,即风速小于10.8m/s,继续采集;若采集到的风速为6级风力范围时,即风速处于10.8-13.8m/s之间,则跳转到下一步;若采集到的风速大于等于7级风力时,即风速大于等于13.8m/s,则跳转到步骤S3;
S2、控制安装在驾驶室的报警装置报警,提醒司机此时风力已经大于6级了,然后让司机自主判断是否需要刹车停止起重机,以及启动电动轮边制动器,然后返回步骤S1继续检测;
S3、控制安装在驾驶室的报警装置报警,然后控制起重机停止工作(即控制起重机停止升降),同时控制第一制动装置启动,开启第一重制动,接着采集移速传感器检测的移速,然后跳转到下一步;
S4、若采集到的移速小于10m/min,则直接启动所有的第二制动装置,因为移速不快,直接启动所有的第二制动装置,进行急停;若采集到的移速大于等于10m/min,表明有一定的移速,则需要逐步控制第二制动装置工作,即根据风向来逐个启动第二制动装置,即远离风向的一对第二制动装置先启动,相当于起重机在往前移动时,起重机后方车轮上安装的电动轮边制动器先启动,然后间隔一定的时间,再启动相邻的电动轮边制动器,直到起重机移动方向最前方车轮上的电动轮边制动器也被启动,此时实现了点刹,大大降低了急刹车的危险性。
具体实施例二,其主要的构成以及控制方法与具体实施例一相似,但是具体的安装数量与安装的起重机种类有所不同,为MG(350+350)-41m-40m门式起重机,其龙门吊重量:空载自重约750T,额定起重量700T;改造被动车轮:车轮直径500mm,轮宽200mm;选用电动轮边制动器型号:DZL40,额定夹紧力65-70KN,额定静摩擦力55-60KN;并且改装前后满载状态的对比如下表2:
表2
改装前后空载状态的对比如下表3所示:
表3
从上面的表2与表3也可以看出,安装了本申请的防风系统后,并且采用本发明的防风控制方法后,防风效果大大提高。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的技术人员应当理解,其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行同等替换;而这些修改或者替换,并不使相应的技术方案的本质脱离本发明各实施例技术方案的精神与范围。
- 一种起重机防风能力检测装置及起重机防风能力检测方法
- 起重机防风控制系统