一种爬楼车
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及轮椅和爬楼设备技术领域,具体是一种爬楼车。
背景技术
爬楼车或爬楼机主要分为载物爬楼机和载人爬楼机两大类。载物爬楼机常被用于物流搬运领域,可以帮助人们轻松的搬运重物上下楼。载人爬楼机适用于残疾人和老年人无障碍通行楼梯、平地等。爬楼机主要由:操作扶手、车架、动力执行单元,这三部分组成。
现有爬楼车的动力执行单元由两组车轮和多个桥板桥板组成,每组车轮以交替的方式在交替的桥板上行走,交替的桥板轮流接触台阶,并交替逐级在楼梯上铺设。
这种爬楼车的问题,一是桥板的交替控制步骤繁琐;二是需要将整个桥板抬起和放下,弧度大、控制动力大。
发明内容
本发明的目的在于提供一种爬楼车,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种爬楼车,包括车架、桥板组件和安装在车架两侧底部的车轮组件,所述车架的两侧分别安装有两相对的滑动组件,所述桥板组件安装在滑动组件的滑动部分,所述滑动组件带动桥板组件交替首尾相接形成供车轮组件行走的行走路径,所述桥板组件包括收放件、上桥板、下桥板和活动连接上桥板、下桥板的支撑件,所述收放件的一端安装在上桥板上,另一端安装在下桥板或支撑件上,一个桥板组件的收放件带动相应的下桥板放下时,另一个桥板组件的收放件带动相应的下桥板收起。
作为本发明进一步的方案:所述支撑件设有限位部用于约束下桥板和收放件的行程。
作为本发明再进一步的方案:所述下桥板远离上桥板的一侧设有一个或多个柔性支撑件,用于增加下桥板与台阶的接触面积。
作为本发明再进一步的方案:所述柔性支撑件为气囊或硬海棉或橡胶或硅胶。
作为本发明再进一步的方案:还包括控制模块,所述控制模块与滑动组件及桥板组件电性连接,控制滑动组件和桥板组件工作。
作为本发明再进一步的方案:所述控制模块连接有传感器组,所述传感器组用于检测车轮组件与台阶的相对位置。
作为本发明再进一步的方案:所述滑动组件包括导向件、滑动件和与滑动件螺纹配合的螺杆,所述导向件和螺杆分别安装在车架的侧部;所述滑动件带动桥板组件运动,导向件为滑动件导向。
作为本发明再进一步的方案:所述桥板组件和滑动组件之间安装有伸缩组件,所述伸缩组件的伸缩带动桥板组件的收放。
作为本发明再进一步的方案:所述伸缩组件包括多个依次套装的伸缩件和伸缩动力件,所述的多个依次套装的伸缩件具有固定端和自由端,安装在固定端的伸缩动力件带动自由端伸缩。
作为本发明再进一步的方案:所述车轮组件包括一个或多个同心安装的车轮。
作为本发明再进一步的方案:当收放件推动支撑件向后旋转,下桥板离开台阶后,支撑件下部向后旋转,之后支撑件上顶面跟上桥板底面贴合,支撑件下底面跟下桥板顶面贴合,支撑件不能再向后转动;当车轮组件压在上桥板上面后,上桥板下移,上桥板与下桥板距离变小,支撑件既不能向前旋转,也不能向后旋转,用于支撑顶起车轮组件。
作为本发明再进一步的方案:所述下桥板的数量为一个或两个,下桥板通过支撑件活动连接上桥板的两端,一个桥板组件的收放件带动相应的下桥板放下时,另一个桥板组件的收放件带动相应的下桥板收起。
与现有技术相比,本发明的有益效果是:位于车轮组件两侧的桥板组件分别为左桥板组件、右桥板组件,车轮组件在左桥板组件上行走时,只需要抬起右桥板组件的下桥板,而无需将整个右桥板组件抬起,或车轮组件在右桥板组件上行走时,只需要抬起左桥板组件的下桥板,而无需将整个左桥板组件抬起;使其离开台阶或地面,以方便移动,实现爬楼,简化了爬楼过程中左桥板组件和右桥板组件的抬起弧度和动作,且控制步骤和逻辑更加简单,也更加节能。
附图说明
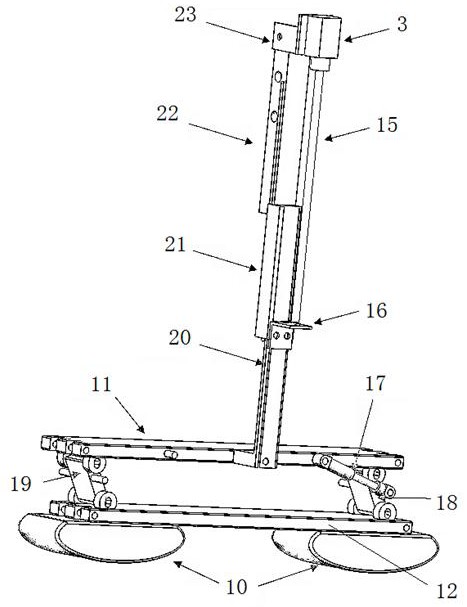
图1为本发明实施例中爬楼车的结构示意图;
图2为本发明实施例中车轮组件的侧视示意图;
图3为本发明实施例中车轮组件的前视示意图;
图4为本发明实施例中左/右桥板组件的结构示意图;
图5为本发明实施例中左/右桥板组件的结构示意图;
图6为本发明实施例中左/右桥板组件的结构示意图;
图7为本发明实施例中左/右桥板组件的结构示意图。
附图中:100、车架;200、车轮组件;300、桥板组件;1、左桥板组件;2、前位置传感器;3、收桥马达;4、右滑行马达;5、滑杆;6、螺杆I;7、后位置传感器;8、右车轮;9、左车轮;10、气囊;11、上桥板;12、下桥板;13、右桥板组件;14、左滑行马达;15、螺杆II;16、螺杆座;17、伸缩泵;18、活动支撑I;19、活动支撑II;20、下滑槽;21、中滑槽;22、上滑槽;23、马达支架。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实施例公开的一些方面相一致的装置和方法的例子。
请参阅图1-3,本发明的一个实施例中,一种爬楼车,包括车架100、桥板组件300和安装在车架两侧底部的车轮组件200,所述车架100的两侧分别安装有两相对的滑动组件,所述桥板组件安装在滑动组件的滑动部分,所述滑动组件带动桥板组件交替首尾相接形成供车轮组件行走的行走路径,所述桥板组件包括收放件、上桥板、下桥板和活动连接上桥板、下桥板的支撑件,所述收放件的一端安装在上桥板上,另一端安装在下桥板或支撑件上,一个桥板组件的收放件带动相应的下桥板放下时,另一个桥板组件的收放件带动相应的下桥板收起。
具体的,位于车轮组件左侧、右侧的桥板组件分别为左桥板组件1和右桥板组件13。滑动组件带动对应的左桥板组件1和右桥板组件13交替首尾相接形成供车轮组件行走的行走路径;所述桥板组件包括收放件、上桥板11、下桥板12和活动连接两个桥板的支撑件,所述支撑件包括活动支撑I18、活动支撑II19,所述活动支撑I18的两端分别铰接上桥板11、下桥板12的同一端,所述活动支撑II19的两端分别铰接上桥板11、下桥板12的相同的另一端;所述收放件采用伸缩泵17,所述伸缩泵17为液压泵或气泵或电动推杆的一种;所述伸缩泵17安装在上桥板11上,所述伸缩泵17的输出端连接活动支撑I18或活动支撑I18或两者,所述伸缩泵17的伸缩实现带动下桥板靠近或远离上桥板以构成或更新行走路径的功能。
另外,所述伸缩泵17的输出端也可连接下桥板12;实现带动下桥板靠近或远离上桥板以构成或更新行走路径的功能。
进一步的,所述支撑件设有限位部用于约束下桥板和收放件的行程。具体是在活动支撑I18和活动支撑II19的顶部加工一个斜角,当活动支撑I18和活动支撑II19转到一个角度时,其顶部与上桥板的底部接触,形成限位,以此限制活动支撑I18和活动支撑II19再转动,使上、下桥板之间的距离不能再变小,从而可以承重。
如图6、7所示,当伸缩泵17推动活动支撑I18和活动支撑II19向后旋转,下桥板离开台阶后,活动支撑I18和活动支撑II19下部向后旋转,之后活动支撑I18和活动支撑II19上顶面A跟上桥板底面贴合,活动支撑I18下底面B和活动支撑II19下底面跟下桥板顶面贴合,活动支撑I18和活动支撑II19不能再向后转动;当车轮组件压在上桥板上面后,上桥板下移,上桥板与下桥板距离变小,活动支撑I18和活动支撑II19既不能向前旋转,也不能向后旋转,用于支撑顶起车轮组件。所述活动支撑I18和活动支撑II19的形状为菱形,在菱形的对角设有连接铰孔C、连接铰孔D与上桥板和下桥板铰接。
综上所述,车轮组件在左桥板组件1上行走时,只需要抬起右桥板组件13的下桥板,而无需将整个右桥板组件13抬起,或车轮组件在右桥板组件13上行走时,只需要抬起左桥板组件1的下桥板,而无需将整个左桥板组件1抬起;使其离开台阶或地面,以方便移动,实现爬楼,简化了爬楼过程中左桥板组件1和右桥板组件13的抬起弧度和动作,且控制步骤和逻辑更加简单,也更加节能。
请参阅图2、4,本发明的一个优选实施例中,所述下桥板远离上桥板的一侧设有一个或多个柔性支撑件,用于增加下桥板与台阶的接触面积。
所述柔性支撑件为气囊10,每个所述下桥板12上的气囊10数量为两个;通过气囊10的变形增加下桥板与台阶的接触面积,使爬楼车可承载更大的重量。
另外,在一些实施例中,每个所述下桥板12上的气囊10数量为一个,通过气囊10的变形增加下桥板与台阶的接触面积。
进一步的,如图5所示,所述下桥板12的数量为两个,安装方式如上所述。
所述柔性支撑件也可采用硬海棉或橡胶或硅胶。
请参阅图1、2,本发明的另一个实施例中,还包括控制模块,所述控制模块与滑动组件及桥板组件电性连接,控制滑动组件和桥板组件工作。
所述控制模块包括微处理器,所述微处理器通过继电器或直接连接滑动组件及桥板组件的动力部分,控制滑动组件和桥板组件工作。
所述控制模块连接有传感器组,所述传感器组包括前位置传感器2和后位置传感器7;前位置传感器2和后位置传感器7用于检测车轮组件与台阶的相对位置。
请参阅图1-4,本发明的另一个实施例中,所述滑动组件包括导向件、滑动件和与滑动件螺纹配合的螺杆,所述导向件和螺杆分别安装在车架的侧部;所述滑动件带动桥板组件运动,导向件为滑动件导向。
具体的,如图3所示,安装在车轮组件两侧的滑动组件分别为左滑动组件和右滑动组件;所述左滑动组件包括导向件、左滑动件和与左滑动件螺纹配合的螺杆;右滑动组件包括导向件、右滑动件和与右滑动件螺纹配合的螺杆。安装在车架的侧部的螺杆作为螺杆I6,所述导向件包括两个安装在车架侧部的滑杆5,所述左滑动件包含左滑块和左滑行马达14,左滑块滑动安装在对应的滑杆上,左滑行马达14安装在对应的左滑块上,并与对应的螺杆I6传动连接;所述左滑行马达14带动左滑块在对应的滑杆上运动;所述右滑动件包含右滑块和右滑行马达4,右滑块滑动安装在对应的滑杆上,右滑行马达4安装在对应的右滑块上,并与相应的螺杆I6传动连接;所述右滑行马达4带动右滑块在对应的滑杆上运动。
请参阅图4,在本发明的另一实施例中,所述桥板组件和滑动组件之间安装有伸缩组件,所述伸缩组件的伸缩带动桥板组件的收放。所述伸缩组件包括多个依次套装的伸缩件和伸缩动力件,所述的多个依次套装的伸缩件具有固定端和自由端,安装在固定端的伸缩动力件带动自由端伸缩。
所述伸缩组件包括收桥马达3和多个依次套装的伸缩件;所述伸缩件分别是下滑槽20、中滑槽21、上滑槽22,所述收桥马达3通过马达支架23安装在滑动组件的滑动部分,即安装在滑块上,所述上滑槽22的一端安装在马达支架23上,所述收桥马达3的输出端连接有螺杆II15,所述螺杆II15上设有螺杆座16,螺杆座16与所述下滑槽20靠近上滑槽22的一端连接,所述收桥马达3通过螺杆II15带动螺杆座16运动,所述螺杆座16的运动带动下滑槽20伸缩,进而实现桥板组件的收放。
请参阅图3,本发明的另一个实施例中,所述车轮组件包括一个或多个同心安装的车轮。
所述车轮组件包括的车轮数量为两个,分别为右车轮8、左车轮9,与右桥板组件13和左桥板组件1相对应。
或者,所述车轮组件包括的车轮数量为一个,所述车轮分为左右两个部分,在爬楼或行走的过程中,左右两个部分分别与右桥板组件13和左桥板组件1相对应的上桥板接触,实现爬楼或行走。
本发明的工作原理:车轮组件在左桥板组件1上行走时,只抬起右桥板组件13的下桥板,而无需将整个右桥板组件13抬起,或车轮组件在右桥板组件13上行走时,只抬起左桥板组件1的下桥板,而无需将整个左桥板组件1抬起;使其离开台阶或地面,以方便移动,实现爬楼。
需要说明的是,本发明所采用的微处理器、前位置传感器、后位置传感器均为现有技术的应用,本专业技术人员能够根据相关的描述实现所要达到的功能,或通过相似的技术实现所需完成的技术特性,在这里就不再详细描述。
本领域技术人员在考虑说明书及实施例处的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
- 一种适用于爬楼载物车的卸货机构及爬楼载物车
- 用于履带爬楼车的滑轮组机构、履带结构及履带爬楼车