一种单人飞行器
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及飞行器技术领域,具体指一种单人飞行器。
背景技术
飞行器的升力装置是一种基于空气动力学的机构,根据结构可以分为固定翼和旋翼,固定翼飞行器一般具有机身以及对称设置的固定翼,由推进器提供动力以获得较大的飞行速度和机动性。其飞行原理在于固定翼与空气之间存相对的速度,空气与固定翼的各面相互作用产生升力从而使飞机获得飞行能力。固定翼飞行器的缺陷在于不能在空中悬停,需要在跑道上滑行起飞或降落以及机场设施建设的支持。
旋翼飞行器如直升机,特点在于起飞时无需跑道,可以在空中悬停,其动力系统包括发动机和旋翼,发动机驱动旋翼旋转产生向下的作用力,该作用力即升力克服地球引力使飞机离地飞行。其缺陷在于巡航速度较低,载重量不高,效率较低,但对地面设施的依赖度很少。
自转旋翼机是结合了固定翼和旋翼两种方式的飞行器,其主要结构包括了旋翼、轮式起落架和推进器,推进器驱动自转旋翼机在跑道上滑行,滑行过程中空气与旋翼叶片相互作用,空气可以推动旋翼叶片旋转,而旋翼叶片旋转则相对滑行方向产生作用力,当旋翼叶片的转速足够高时,该作用力使飞机升空从而实现飞行。其优点是对起飞跑道要求较低但仍旧需要滑行距离,而且不能在空中悬停应用范围有限。
还有现在已经比较常见的无人机飞行器,但是由于动力和功耗的问题,还不能实现载人飞行。现有的飞行器的结构过于复杂,还没有一种可以实现单人的无动力飞行器。因此,现有技术还有待于改进和发展。
发明内容
本发明的目的在于针对现有技术的缺陷和不足,提供一种结构合理、可实现载人飞行、驱动模式多样、可无动力滞空安全性高的单人飞行器。
为了实现上述目的,本发明采用以下技术方案:
本发明所述的一种单人飞行器,包括平动翼、扑动翼和载体,所述载体上设有机台,机台上竖直设有中心轴,中心轴与机台之间设有滑动轴承,中心轴的上端可转动地设有平动翼;所述中心轴的两侧对称地设有扑动翼且两个扑动翼分别与机台转动连接;所述载体上设有驱动装置,驱动装置通过传动链分别连接中心轴和两个扑动翼。
根据以上方案,所述驱动装置包括手扶架,载体的中部横向设有强化杆,手扶架与强化杆转动连接,且手扶架通过传动链分别连接中心轴和两个扑动翼;所述传动链为杠杆机构、滑轮机构以及其他可作为力和动作传导的装置。
根据以上方案,所述载体的下端设有底板,底板上设有脚踏板,脚踏板与底板转动连接,且脚踏板与手扶架联动设置。
根据以上方案,所述驱动装置还包括辅助电动机和蓄能电池。
根据以上方案,所述扑动翼包括两个翼翅和转动轴承,转动轴承与中心轴固定连接,两个翼翅相对地设于转动轴承两侧并与固定连接。
根据以上方案,所述扑动翼包括翼翅和驱动连杆,翼翅的根部通过转动铰链与机台转动连接,驱动连杆的一端与翼翅固定连接,驱动连杆的另一端与传动链配合连接。
根据以上方案,所述翼翅的上侧平面为扰流翼面,翼翅的下侧平面为扇动翼面;所述扰流翼面由前部曲面以及后部平滑面连接构成,扰流翼面的前部曲面相对于平动翼的旋转平面向上凸起,所述扰流翼面和扇动翼面在纵向的投影平面呈非对称结构。
根据以上方案,所述扰流翼面与扇动翼面的前侧缘相互闭合构成前翅缘,扰流翼面与扇动翼面的后侧缘相互闭合构成后翼尾;所述扰流翼面前部曲面的最大拱高点所在的翼展经线H靠近前翅缘。
本发明有益效果为:本发明结构合理,人站在载体的底板上驱动手扶架或脚踏板,传动链的将操作者的力缩放后驱动平动翼和两个扑动翼,平动翼在上下往复运动时旋转产生升力,扑动翼既产生升力也产生向前的推进力;实现低空载人飞行的目的,当飞行器失去动力时,平动翼在下坠时会继续旋转产生滞空力,保证飞行器和人员的安全性。
附图说明
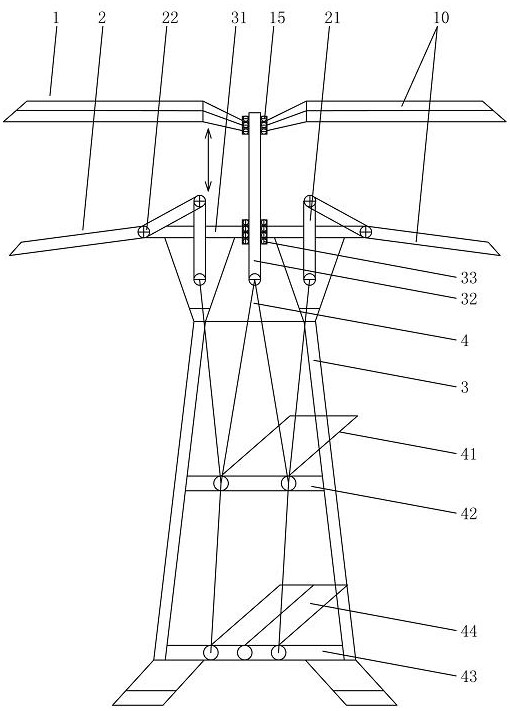
图1是本发明的整体结构示意图;
图2是本发明的翼翅与中心轴装配结构示意图;
图3是本发明的翼翅截面结构示意图。
图中:
1、平动翼;2、扑动翼;3、载体;4、驱动装置;10、翼翅;11、扰流翼面;12、扇动翼面;13、前翅缘;14、后翼尾;15、转动轴承;21、驱动连杆;22、转动铰链;31、机台;32、中心轴;33、滑动轴承;41、手扶架;42、强化杆;43、底板;44、脚踏板。
具体实施方式
下面结合附图与实施例对本发明的技术方案进行说明。
如图1所示,本发明所述的一种单人飞行器,包括平动翼1、扑动翼2和载体3,所述载体3上设有机台31,机台31上竖直设有中心轴32,中心轴32与机台31之间设有滑动轴承33,中心轴32的上端可转动地设有平动翼1;所述中心轴32的两侧对称地设有扑动翼2且两个扑动翼2分别与机台31转动连接;所述载体3上设有驱动装置4,驱动装置4通过传动链分别连接中心轴32和两个扑动翼2。所述平动翼1通过中心轴32可在机台31上进行上下往复运动,同于平动翼1可在中心轴32上旋转,而所述两个扑动翼2在机台31的两侧仅进行上下摆动。平动翼1和扑动翼2在同一时点的运动方向相反从而保证飞行器的稳定性,即二者通过同步的相向运动或向背运动抵消振动。平动翼1在上下往复运动过程中获得旋转动力,且旋转的平动翼1会提供升力使飞行器起飞,而扑动翼2的向下扑动行程可以提供升力,扑动翼2向上扑动的行程会产生向前的驱动力使飞行器产生位移,操作者在载体3上通过驱动装置4分别驱动平动翼1和扑动翼2可以实现载人飞行的目的。
所述驱动装置4包括手扶架41,载体3的中部横向设有强化杆42,手扶架41与强化杆42转动连接,且手扶架41通过传动链分别连接中心轴32和两个扑动翼2;所述传动链为杠杆机构、滑轮机构以及其他可作为力和动作传导的装置。所述传动链将操作者的手施加在手扶架41上的动力传递给平动翼1和扑动翼2使其工作,从而实现飞行目的。
所述载体3的下端设有底板43,底板43上设有脚踏板44,脚踏板44与底板43转动连接,且脚踏板44与手扶架41联动设置。操作者还可以通过脚踏板44实现动力输出的目的,实现手脚交替输出的目的,操作者的体力可以更好的延长飞行时间。
所述驱动装置4还包括辅助电动机和蓄能电池,所述辅助电动机分别连接传动链和蓄能电池,辅助电动机可以用于提前驱动平动翼1使其获得一定的初速,减少人力的使用和缩短飞行启动时间,且辅助电动机可以作为备用动力输出,在人力不足的情况下,保证飞行器可以安全着陆。
所述扑动翼2包括两个翼翅10和转动轴承15,转动轴承15与中心轴32固定连接,两个翼翅10相对地设于转动轴承15两侧并与固定连接;所述扑动翼2包括翼翅10和驱动连杆21,翼翅10的根部通过转动铰链22与机台31转动连接,驱动连杆21的一端与翼翅10固定连接,驱动连杆21的另一端与传动链配合连接。所述传动链通过驱动连杆21驱动两个扑动翼2在机台31两侧的上下振动,扑动翼2通过翼翅10的空气动力学设计实现竖直升空力和水平推进力的获得。
所述翼翅10的上侧平面为扰流翼面11,翼翅10的下侧平面为扇动翼面12;所述扰流翼面11由前部曲面以及后部平滑面连接构成,扰流翼面11的前部曲面相对于平动翼1的旋转平面向上凸起,所述扰流翼面11和扇动翼面12在纵向的投影平面呈非对称结构。所述在平动翼1启动后上下往复运动,扰流翼面11向上运动,空气流动经过扰流翼面11在翼展经线H前后两侧产生压强差,该压强差对翼翅10构成一个向前推动力使平动翼1转动,此时,前翅缘13相对空气产生差速从而对平动翼1构成阻力,推进力克服阻力则驱动平动翼1旋转;所述扇动翼面12向下运动,在平动翼1转速很低时,攻角小使空气相对于扇动翼面12作用力基本垂直于平动翼1的旋转平面,则下层空气对翼翅10向前旋转运动造成阻力很小,由此平动翼1可以在上下往复运动一段时间后获得较高的转速。当平动翼1转速较高时,扇动翼面12既存在向下运动还存在向前运动,二者叠加形成的矢量运动相对于平动翼1旋转平面的矢量角大于安装角C,即平动翼1的旋转速度越快扇动翼面12产生的升力更大,通过控制平动翼1的上下运动频率可以提高平动翼1的转速进而改变平动翼1产生的升力。平动翼1可以将上下往复运动转化为自身的旋转运动,进而通过旋转运动产生升力实现飞行目的。
所述扑动翼2的空气动力学原理与平动翼1相同,但扑动翼2仅存在上下的摆动而不旋转,翼翅10向上摆动时其上部的扰流翼面11产生压强差转化成向前的推进力,翼翅10向下摆动时其下部的扇动翼面12则直接与空气作用产生升力。
为了安全起见,本发明平动翼1的翼翅10安装角C范围在-2°~6°之间,优选的翼翅10安装角C为2°,在操作者力量不足时飞行器会失去动力下坠,此时旋转的平动翼1受到下方空气作用仍旧继续保持旋转,而此时翼翅10的矢量攻角大于0°,因此平动翼1会提供升力使飞行器获得滞空能力,延缓飞行器的坠落速度从而保证人员和飞行器的安全。
所述扰流翼面11与扇动翼面12的前侧缘相互闭合构成前翅缘13,扰流翼面11与扇动翼面12的后侧缘相互闭合构成后翼尾14;所述扰流翼面11前部曲面的最大拱高点所在的翼展经线H靠近前翅缘13。
以上所述仅是本发明的较佳实施方式,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本发明专利申请范围内。
- 一种新型单人飞行器
- 一种单人飞行器