全自动FAC镜准直系统
文献发布时间:2023-06-19 10:05:17
技术领域
本发明属于耦光设备技术领域,涉及一种全自动FAC镜准直系统。
背景技术
光纤输出高功率半导体激光器,作为光纤激光器泵浦源和作为工业加工的直接光源得到了越来越广泛的应用,需求功率不断提高。光纤输出高功率半导体激光器的准直耦合结构在提高输出功率方面主要解决两方面的问题,一是提高散热效率,降低激光芯片的温升,二是实现光束密排提高耦合效率,把更多单管半导体激光器的光高效率地耦合到指定的光纤中。在提高散热效率方面,无论采用何种散热方式,缩短发热源与散热面之间的距离都是至关重要的。所谓光束密排,是指在不挡光的情况下将相同数量的光束排列在一起的时候,光束最外侧点的外接圆最小,或者在相同直径的圆中放入最多的光束。如果把单管半导体激光器准直光束的光斑等效为一个矩形,在对多单管半导体激光器准直光束进行合束时,矩形长边之间紧贴并且短边对齐排列,称为正排列,如果矩形长边紧贴但短边没有对齐,称为斜排列,对于相同的准直光束,斜排列所形成的合束光斑外接圆将大于正排列所形成的合束光斑外接圆,因此光束只有正排列才能实现密排。
多单管半导体激光器准直合束结构都是由半导体激光器单芯片准直单元经空间合束、偏振合束或波长合束等方式构成,其中由一列单芯片准直单元进行空间合束组成准直合束阵列是最基本的结构,进一步提高功率可由这种准直合束阵列进行空间合束、偏振合束或波长合束来实现。由于准直合束阵列的空间合束、偏振合束和波长合束技术已经比较成熟,因此设计最优的准直合束阵列结构非常重要。准直合束阵列中的基本单元是单芯片准直单元,所以准直合束阵列的结构主要由单芯片准直单元的结构予以体现。单芯片准直单元主要由热沉、激光芯片组件(COS)、快轴准直透镜(FAC)、慢轴准直透镜(SAC)和45度反射镜等元件构成。
FAC准直要求精度高,需要在各个方向对准直位置进行精准调节。因此,需要一种能够实现FAC准直位置多维度精准调节的自动化设备来完成FAC的准直调节,将准直后FAC镜进行点胶固定。
发明内容
本发明针对上述问题,提供一种全自动FAC镜准直系统,该准直系统能够实现FAC准直多维度精准调节,提高了FAC准直效率和准直精度。
按照本发明的技术方案:一种全自动FAC镜准直系统,其特征在于:包括系统底板,所述系统底板的上表面一侧安装气动开关、手动滑台,手动滑台上安装上电气缸固定座,上电气缸固定座上安装上电气缸,上电气缸的活动端安装激光器模组底板;
系统底板的上表面另一侧架设龙门架柱,龙门架柱的顶部支撑设置龙门架梁,龙门架梁的顶面安装X轴电机,X轴电机的移动端固定连接电机转接板,电机转接板上安装Y轴电机,Y轴电机的移动端安装电机转接件,电机转接件上安装Z轴电机,Z轴电机的升降运动端安装ROLL轴电机,ROLL轴电机的运动端安装PITCH轴电机,PITCH轴电机的运动端安装YAW轴电机,YAW轴电机的活动端安装传感器连接件,传感器连接件上安装传感器,传感器上安装夹子组件;
所述Z轴电机的升降运动端还安装滑台气缸固定板,滑台气缸固定板上安装点胶气缸,点胶气缸的活动端安装点胶针筒连接件,点胶针筒连接件的下部安装针筒固定座,针筒固定座上配合设置针筒;
系统底板上安装滑台部件,滑台部件上安装CCD支架,CCD支架上安装近场CCD。
作为本发明的进一步改进,所述夹子组件包括夹子底座,夹子底座的夹子面设有相互配合的第一FAC夹子、第二FAC夹子,夹子底座侧部安装夹料气缸,夹子底座上安装第一导轨、第二导轨,第一FAC夹子滑动设置于第一导轨上,第二FAC夹子滑动设置于第二导轨上,第一FAC夹子与第二FAC夹子由夹料气缸带动实现夹料动作;夹子底座上设置气缸微调座。
作为本发明的进一步改进,所述夹子底座的侧部设置UVLED侧连接件、探针固定座。
作为本发明的进一步改进,所述点胶气缸的活动端顶部安装滑台气缸调节件,滑台气缸连接件上安装分厘头。
作为本发明的进一步改进,所述系统底板上对应于气动开关的内侧设置下部X轴移动部件,下部X轴移动部件包括下部X轴电机,下部X轴电机驱动下部Y轴电机部件移动,下部Y轴电机部件驱动FAC料盒运动,FAC料盒上设置红光部件,下部Y轴电机部件的侧部设置光源固定槽。
作为本发明的进一步改进,所述滑台部件位于靠近龙门架柱一侧。
本发明的技术效果在于:本发明产品结构合理巧妙,在使用时,能够实现FAC准直多维度精准调节,提高了FAC准直效率和准直精度;物料相机能够在镜子夹取机构夹持取料的时候视觉识别物料位置,然后调整镜子夹取机构对准物料位置,获取远近场光斑机采集到的光斑图像;根据光斑图像的光斑参数调整FAC夹的移动,直至所述光斑参数满足对准条件,其中所述对准条件包括:光斑位于中心位置、光斑收敛至小形状、光斑尾部收敛且上下均匀以及光斑倾斜角为零,点胶相机能够在点胶针筒点胶时候视觉识别点胶位置,点胶装置点胶,UV固化FAC镜与泵浦源的位置。
附图说明
图1为本发明的结构示意图。
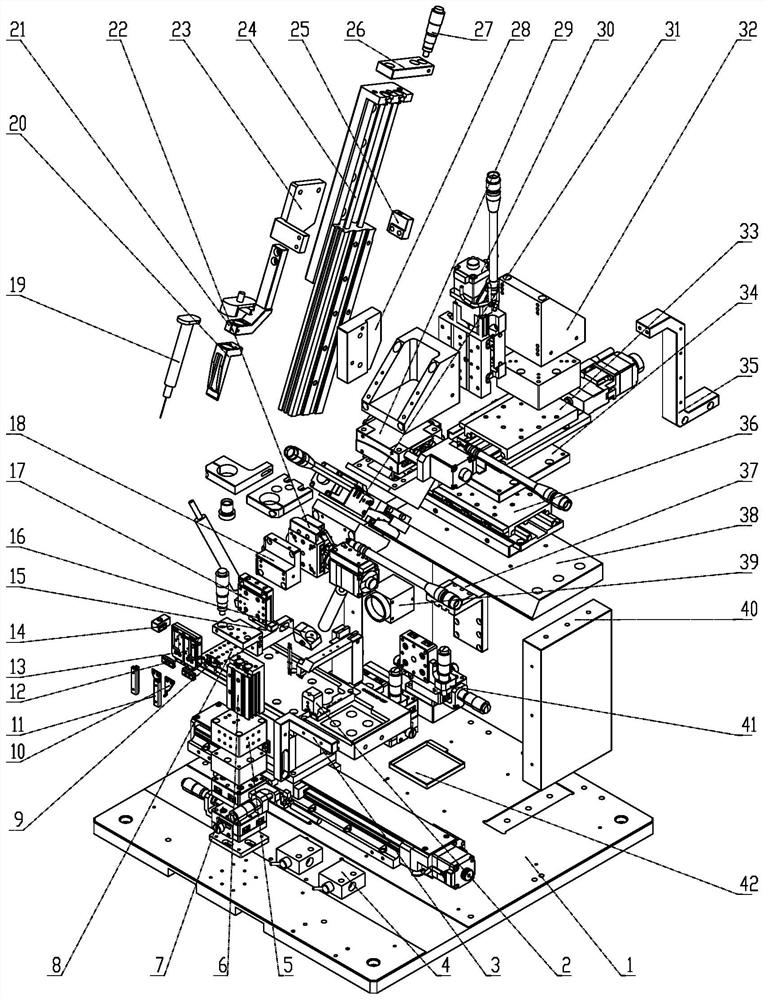
图2为本发明的爆炸结构图。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步的说明。
图1、2中,包括系统底板1、红光部件2、光源固定槽3、气动开关4、上电气缸固定座5、上电气缸6、手动滑台7、激光器模组底板8、夹料气缸9、第一FAC夹子10、第一导轨11、第二导轨12、第二FAC夹子13、气缸微调座14、探针固定座15、UVLED侧连接件16、传感器17、传感器连接件18、针筒19、针筒固定座20、点胶针筒连接臂21、YAW轴电机22、点胶针筒连接件23、点胶气缸24、潜望镜前壳基座25、滑台气缸调节件26、分厘头27、滑台气缸固定板28、ROLL轴电机29、Z轴电机30、PITCH电机31、电机转接件32、Y轴电机33、电机转接板34、Z型件35、X轴电机36、CCD支架37、龙门架梁38、近场CCD39、龙门架柱40、滑台部件41、FAC料盒42等。
如图1、2所示,本发明是一种全自动FAC镜准直系统,包括系统底板1,所述系统底板1的上表面一侧安装气动开关4、手动滑台7,手动滑台7上安装上电气缸固定座5,上电气缸固定座5上安装上电气缸6,上电气缸6的活动端安装激光器模组底板8。
系统底板1的上表面另一侧架设龙门架柱40,龙门架柱40的顶部支撑设置龙门架梁38,龙门架梁38的顶面安装X轴电机36,X轴电机36的移动端固定连接电机转接板34,电机转接板34上安装Y轴电机33,Y轴电机33的移动端安装电机转接件32,电机转接件32上安装Z轴电机30,Z轴电机30的升降运动端安装ROLL轴电机29,ROLL轴电机29的运动端安装PITCH轴电机31,PITCH轴电机31的运动端安装YAW轴电机22,YAW轴电机22的活动端安装传感器连接件18,传感器连接件18上安装传感器17,传感器17上安装夹子组件。
所述Z轴电机30的升降运动端还安装滑台气缸固定板28,滑台气缸固定板28上安装点胶气缸24,点胶气缸24的活动端安装点胶针筒连接件23,点胶针筒连接件23的下部安装针筒固定座20,针筒固定座20上配合设置针筒19。
系统底板1上安装滑台部件41,滑台部件41上安装CCD支架37,CCD支架37上安装近场CCD39。
夹子组件包括夹子底座,夹子底座的夹子面设有相互配合的第一FAC夹子10、第二FAC夹子13,夹子底座侧部安装夹料气缸9,夹子底座上安装第一导轨11、第二导轨12,第一FAC夹子10滑动设置于第一导轨11上,第二FAC夹子13滑动设置于第二导轨12上,第一FAC夹子10与第二FAC夹子13由夹料气缸9带动实现夹料动作;夹子底座上设置气缸微调座14。
夹子底座的侧部设置UVLED侧连接件16、探针固定座15。
点胶气缸24的活动端顶部安装滑台气缸调节件26,滑台气缸连接件26上安装分厘头27。
系统底板1上对应于气动开关4的内侧设置下部X轴移动部件,下部X轴移动部件包括下部X轴电机,下部X轴电机驱动下部Y轴电机部件移动,下部Y轴电机部件驱动FAC料盒42运动,FAC料盒42上设置红光部件2,下部Y轴电机部件的侧部设置光源固定槽3。
滑台部件41位于靠近龙门架柱40一侧。
如图1、2所示,本发明产品在工作时,将对准后的FAC镜进行点胶固定,本发明提供的光斑合束的控制方法能够实现光斑合束的自动化,节约了人力成本。下部X轴电机用于实现对FAC料盒42沿X轴方向的推送,下部Y轴电机用于实现FAC料盒42沿Y轴方向的移动,以实现将料盒移动至相应的料位。
X轴电机36用于实现对Y轴电机33沿X轴方向的移动,Y轴电机33用于实现电机转接件32沿Y轴方向的移动,电机转接件32上安装Z轴电机30,Z轴电机30用于带动ROLL轴电机29实现升降移动,ROLL轴电机29用于实现PITCH轴电机31进行相应转动,Z轴电机30用于实现点胶气缸24的升降移动,点胶气缸24在工作时,带动针筒19进行升降移动,以实现对相应部位的点胶作业。
可以理解的是,X轴电机36、Y轴电机33、Z轴电机30、ROLL轴电机29、下部X轴电机、下部Y轴电机分别包括与各自电机相配合的丝杆组件,电机驱动相应的丝杆组件带动与丝杆组件相连接的部件相应移动。
PITCH轴电机31用于实现传感器连接件18及第一FAC夹子10、第二FAC夹子13相互配合实现对物料的夹取,并移动至合适的位置。
- 全自动FAC镜准直系统
- 全自动FAC巴粘透镜组准直系统