作业机械及其控制方法
文献发布时间:2023-06-19 10:08:35
技术领域
本公开涉及作业机械及其控制方法。
背景技术
以往,已知有一种除了具有手动的差速锁定的工作/解除模式之外还具有自动差速锁定模式的机动平地机。这样的机动平地机例如在美国专利申请公开第2007/0250236号说明书(专利文献1)、美国专利申请公开第2008/0135322号说明书(专利文献2)等中被公开。
在上述自动差速锁定模式的控制中,根据前轮转向角度传感器和铰接角度传感器的信息来判断是否正在回转。在判断为直线前进的情况下差速锁定工作,在判断为回转的情况下差速锁定被解除。
现有技术文献
专利文献
专利文献1:美国专利申请公开第2007/0250236号说明书
专利文献2:美国专利申请公开第2008/0135322号说明书
发明内容
发明要解决的课题
然而,在上述自动差速锁定模式的控制中,在回转时后轮滑移的情况下,差速锁定维持被解除。因此,当使前轮转向角度和铰接角度为0°(直线前进)、或者手动地不使差速锁定工作时,后轮不能从滑移脱离。
另外,在上述文献所记载的机动平地机中,由于前轮转向角度传感器设置于前轮的附近,因此容易发生故障。另外,由于铰接角度传感器设置于前框架和后框架的连结部附近,因此容易发生故障。
本公开的目的在于提供一种即使在回转时车轮滑移的情况下也容易从滑移脱离,并且传感器难以发生故障的作业机械及其控制方法。
用于解决课题的方案
本公开的作业机械具备差动装置、差动控制装置、传感器构件以及控制部。差动控制装置禁止或限制由差动装置进行的差动。传感器构件检测作业机械的回转角速度。控制部基于由传感器构件检测到的回转角速度,控制对由差动控制装置进行的差动的禁止或限制。
本公开的作业机械的控制方法是具有右轮和左轮的作业机械的控制方法,且包括以下的工序。
检测作业机械的回转角速度。基于检测到的作业机械的回转角速度,来控制对右轮和左轮的差动的禁止或限制。
发明效果
根据本公开,能够实现即使在回转时车轮滑移的情况下也容易从滑移脱离,并且传感器难以发生故障的作业机械及其控制方法。
附图说明
图1是概略地示出一实施方式中的机动平地机的结构的立体图。
图2是概略地示出一实施方式中的与机动平地机的行驶轮的驱动控制相关的结构的图。
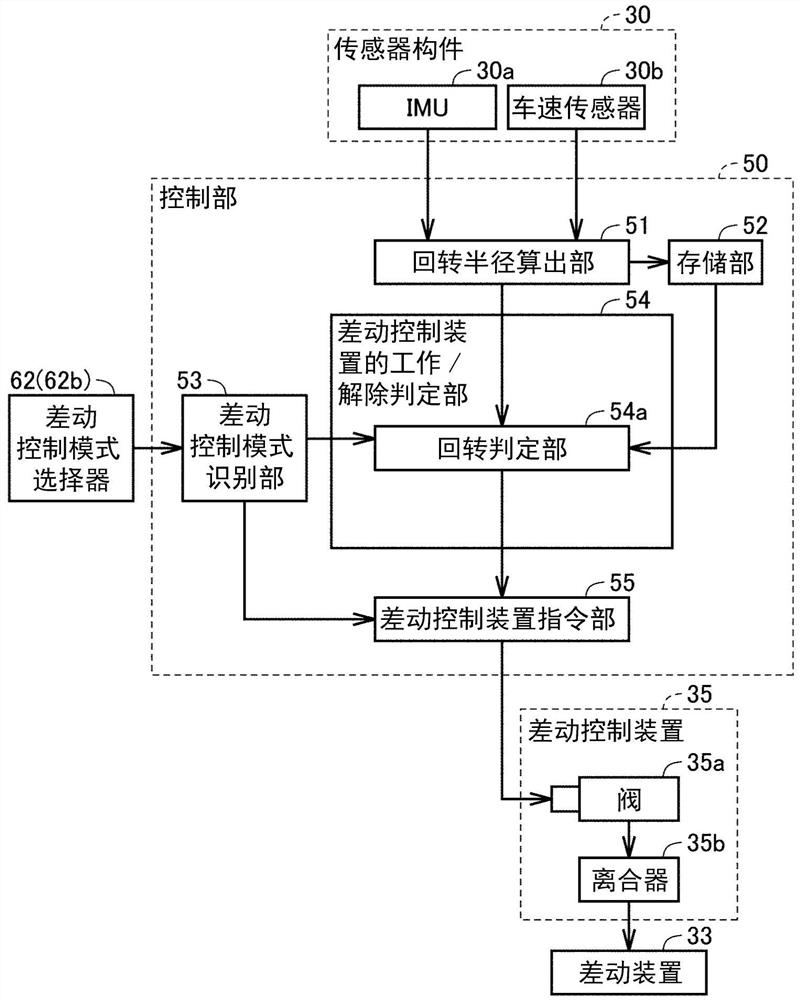
图3是示出一实施方式中的机动平地机的控制部的功能的功能框图。
图4是示出一实施方式中的机动平地机的行驶的控制方法的流程图。
图5是用于说明回转半径的图。
图6是用于说明前轮的回转半径的计算式的图。
具体实施方式
以下,基于附图对本公开的实施方式的作业机械进行说明。
需要说明的是,在说明书及附图中,对相同的构成要素或对应的构成要素标注相同的附图标记,不再进行重复的说明。另外,在附图中,为了便于说明,有时也省略或简化结构。
<机动平地机的结构>
首先,对作为能够应用本公开的思想的作业机械的一例的机动平地机的结构进行说明。
图1是概略地示出一实施方式中的机动平地机的结构的立体图。如图1所示,本实施方式的机动平地机1主要具有行驶轮11、12、车身框架2、驾驶室3以及工作装置4。另外,机动平地机1具有配置于发动机室6的发动机等构成部件。工作装置4例如包括推土铲42。机动平地机1能够通过推土铲42进行平整地面作业、挖掘作业、除雪作业、材料混合等作业。
需要说明的是,在以下的图的说明中,将机动平地机1所直线前进行驶的方向称为机动平地机1的前后方向。在机动平地机1的前后方向上,将相对于工作装置4配置有前轮11的一侧作为前方向。在机动平地机1的前后方向上,将相对于工作装置4配置有后轮12的一侧作为后方向。机动平地机1的左右方向是在俯视下与前后方向正交的方向。从前方向观察时左右方向的右侧、左侧分别为右方向、左方向。机动平地机1的上下方向是与由前后方向及左右方向确定的平面正交的方向。在上下方向上,地面所在的一侧为下侧,天空所在的一侧为上侧。
行驶轮11、12包括前轮11和后轮12。前轮11在左右单侧各具有1个轮,前轮11包括右前轮11R和左前轮11L。后轮12在左右单侧各具有2个轮,后轮12包括两个右轮12R和两个左轮12L(图2)。前轮11及后轮12的数量及配置不限于图1所示的例子。
车身框架2沿前后方向延伸。车身框架2包括后框架21和前框架22。
后框架21对外装罩25、以及配置于发动机室6的发动机等构成部件进行支承。外装罩25覆盖发动机室6。在后框架21分别安装有上述的例如4个后轮12。4个后轮12分别可以借助来自发动机的驱动力驱动而旋转。
前框架22安装于后框架21的前方。前框架22以能够转动的方式与后框架21连结。前框架22沿前后方向延伸。前框架22具有与后框架21连结的基端部、以及与基端部相反一侧的前端部。前框架22的基端部通过铅垂的铰接销24(图2)与后框架21的前端部连结。前框架22由1根梁构成。
在前框架22与后框架21之间安装有铰接缸23。前框架22设置为能够借助铰接缸23的伸缩而相对于后框架21转动(铰接)。
在前框架22的前端部以能够旋转的方式安装有上述的例如两个前轮11。前轮11以能够借助转向缸7的伸缩而相对于前框架22回转的方式安装于该前框架22。机动平地机1能够借助转向缸7的伸缩来变更行进方向。
在车身框架2的前端2F安装有配重26。配重26是安装于前框架22的配件的一种。配重26装配于前框架22,以增加施加于前轮11的向下的负载,从而能够转向且增加推土铲42的按压负载。
驾驶室3例如载置于后框架21。在驾驶室3的内部设置有方向盘、变速杆、工作装置4的操作杆、制动器、油门踏板、微动踏板等操作部(未图示)。通过行驶轮11、12、车身框架2、驾驶室3构成车辆主体(机械主体)。
工作装置4主要具有例如牵引杆40、回转环41及推土铲42。牵引杆40配置于前框架22的下方。牵引杆40的前端部使用球轴部与前框架22的前端部连结。牵引杆40的前端部以能够摆动的方式安装于前框架22的前端部。
牵引杆40的后端部通过一对提升缸44、45支承于前框架22(车辆主体的一部分)。借助一对提升缸44、45的伸缩,能够使牵引杆40的后端部相对于前框架22上下升降。另外,牵引杆40能够借助一对提升缸44、45的彼此不同的伸缩而以沿前后方向延伸的轴为中心进行摆动。
回转环41配置于前框架22的下方。回转环41配置于牵引杆40的下方。回转环41以能够回转(旋转)的方式安装于牵引杆40的后端部。回转环41能够被液压马达49驱动为,相对于牵引杆40向从车辆上方观察时的顺时针方向和逆时针方向这两个方向回转。推土铲42配设于回转环41。通过回转环41的回转驱动,来调整推土铲42的推土铲推进角。推土铲推进角是指,从车辆上方观察时的视角下的推土铲42相对于机动平地机1的前后方向的倾斜角度。
推土铲42配置在前轮11与后轮12之间。前轮11配置于比推土铲42靠前方的位置。后轮12配置于比推土铲42靠后方的位置。推土铲42配置在车身框架2的前端2F与车身框架2的后端2R之间。推土铲42支承于回转环41。推土铲42经由回转环41而支承于牵引杆40。推土铲42经由牵引杆40而支承于前框架22。
一对提升缸44、45将牵引杆40悬吊(悬架)于车辆主体。具体而言,一对提升缸44、45经由牵引杆40对位于前框架22(车辆主体的一部分)的下方的推土铲42进行支承。能够通过使一对提升缸44、45伸缩来变更牵引杆40及推土铲42的高度。
如上所述,推土铲42构成为,经由牵引杆40和回转环41而能够进行相对于车辆的上下升降、以及以沿前后方向延伸的轴为中心的摆动。
<与机动平地机的行驶轮的驱动控制相关的结构>
接下来,使用图2对与上述机动平地机1的行驶轮(后轮12)的驱动控制相关的结构进行说明。
图2是概略地示出一实施方式中的与机动平地机的行驶轮的驱动控制相关的结构的图。如图2所示,本实施方式的机动平地机1具有行驶轮11、12、发动机31、变速器32、差动装置33、串联式装置34R、34L、以及差动控制装置35。
发动机31支承于后框架21。差动装置33经由变速器32与发动机31连接。右串联式装置34R及左串联式装置34L分别经由差动控制装置35与差动装置33连接。
在右串联式装置34R连接有后轮12的一对右轮12R。在左串联式装置34L连接有后轮12的一对左轮12L。发动机31借助变速器32、差动装置33、差动控制装置35以及串联式装置34R、34L来驱动右轮12R和左轮12L。
差动装置33具有允许后轮12的右轮12R和左轮12L之间的差动的功能。差动装置33具有驱动小齿轮33a、锥齿轮33b、差速器壳体33c、小齿轮33d、以及侧齿轮33eR、33eL。
驱动小齿轮33a与从变速器32延伸的轴连接,并与该轴一起旋转。锥齿轮33b与驱动小齿轮33a啮合,并随着驱动小齿轮33a的旋转而旋转。差速器壳体33c固定于锥齿轮33b,并与锥齿轮33b一起旋转。
小齿轮33d以能够旋转的方式支承于差速器壳体33c。侧齿轮33eR、33eL分别与小齿轮33d啮合。侧齿轮33eR与连接于右轮12R的驱动轴连接。侧齿轮33eL与连接于左轮12L的驱动轴连接。
在小齿轮33d不相对于差速器壳体33c相对旋转,并将动力向侧齿轮33eR、33eL分别传递的情况下,右轮12R和左轮12L不发生差动而以彼此相同的转速旋转。另一方面,在小齿轮33d相对于差速器壳体33c相对旋转,并将动力向侧齿轮33eR、33eL分别传递的情况下,右轮12R和左轮12L发生差动而以彼此不同的转速旋转。这样,差动装置33具有允许右轮12R和左轮12L之间的差动的功能。
差动控制装置35具有禁止或限制右轮12R和左轮12L之间的差动的功能。差动控制装置35可以是差动固定装置(差速锁定装置)和差动限制装置(LSD)中的任一个。在差动控制装置35是差动固定装置的情况下,差动控制装置35具有禁止右轮12R和左轮12L之间的差动的功能。另外,在差动控制装置35是差动限制装置的情况下,差动控制装置35具有限制右轮12R和左轮12L之间的差动的功能。
差动控制装置35例如具有阀35a和离合器35b。阀35a基于来自控制部50的电控制信号(EPC(Electric Pressure Control)电流),控制先导油的流动。离合器35b由被阀35a控制的先导油的油量(压力)驱动控制。通过该离合器35b的动作来禁止或限制右轮12R和左轮12L之间的差动。
在通过离合豁35b的动作来禁止右轮12R和左轮12L之间的差动的情况下,右轮12R和左轮12L双方被施加驱动力,使得右轮12R的转速与左轮12L的转速相同。另外,在通过离合器35b的动作来限制右轮12R和左轮12L之间的差动的情况下,右轮12R和左轮12L双方被施加驱动力,使得右轮12R和左轮12L的转速之差比限制前的转速之差小。
本实施方式的机动平地机1还具有传感器构件30、差动控制模式选择器62及控制部50。传感器构件30包括IMU(Inertial Measurement Unit:惯性计测装置)30a和车速传感器30b。
IMU30a在机动平地机1移动时(行驶时)检出作用于机动平地机1的回转角速度(绕车身上下轴的旋转(横摆)角速度),并产生该回转角速度的信号。将由IMU30a产生的回转角速度的信号向控制部50输出。
在工作装置4、串联式装置34R、34L等的相对于车身框架2相对工作的部分安装了IMU30a的情况下,不能通过IMU30a来进行机动平地机1的回转角速度的测定。因此,IMU30a安装于机动平地机1的车身框架2或相对于车身框架2不相对工作的部分。
为了使IMU30a难以受到砂土等的影响,优选将IMU30a配置于远离行驶轮11、12及工作装置4的位置。从IMU30a难以受到砂土等的影响这样的观点出发,优选IMU30a例如如图1所示那样安装于驾驶室3的内部。优选IMU30a不是安装于前框架22侧,而是安装于后框架21侧。
车速传感器30b检出机动平地机1移动时(行驶时)的移动速度(行驶速度),并产生该移动速度的信号。将由车速传感器30b产生的移动速度的信号向控制部50输出。
车速传感器30b例如测定变速器32的输出轴的旋转速度。另外,车速传感器30b例如也可以利用GPS(Global Positioning System)来检出机动平地机1的移动速度。
差动控制模式选择器62配置于图1所示的驾驶室3的内部。差动控制模式选择器62具有开关操作构件62a和开关操作检出部62b。为了设定工作模式、解除模式及自动差动控制模式中的任一个模式,由操作员操作开关操作构件62a。开关操作检出部62b检测在开关操作构件62a中所设定的模式是工作模式、解除模式及自动差动控制模式中的哪一个模式。开关操作检出部62b将表示上述任一个模式的检测信号向控制部50输出。
在上述工作模式中,维持使对由差动控制装置35进行的差动的禁止或限制的功能工作的工作状态。因此,在工作模式中,右轮12R和左轮12L的转速之差相同、或者比差动限制前的转速之差小。
另外,在上述解除模式中,维持将对由差动控制装置35进行的差动的禁止或限制的功能解除的解除状态。因此,在解除模式中,右轮12R与左轮12L发生差动,右轮12R的转速和左轮12L的转速根据分别施加于右轮12R和左轮12L的阻力而变化。
在上述自动差动控制模式中,自动地控制对由差动控制装置35进行的差动的禁止或限制的功能。关于自动差动控制模式中的、上述差动的禁止或限制功能的控制方法,将进行后述。
<控制部50的结构>
接下来,使用图3对一实施方式中的控制部50的结构进行说明。
图3是示出一实施方式中的机动平地机1的控制部50的功能的功能框图。图3所示的控制部50基于由传感器构件30检测到的回转角速度来判定机动平地机1的回转,并在回转时控制对由差动控制装置35进行的差动的禁止或限制的功能。
另外,控制部50基于由传感器构件30检测到的机动平地机1的回转角速度和移动速度来算出机动平地机1的回转半径,并基于算出的回转半径来控制对由差动控制装置35进行的差动的禁止或限制的功能。
另外,控制部50通过算出的回转半径与存储于存储部52的阈值之间的比较来判定回转,并基于该比较来控制对由差动控制装置35进行的差动的禁止或限制的功能。
控制部50基于算出的回转半径为第一阈值以下的判定,解除对由差动控制装置35进行的差动的禁止或限制的功能。第一阈值例如是机动平地机1中的转向角β为转向角的最大值的1/2时的回转半径。
控制部50基于算出的回转半径为第二阈值以下的判定,解除对由差动控制装置35进行的差动的禁止或限制的功能。第二阈值例如是机动平地机1中的铰接角α为铰接角的最大值的1/2时的回转半径。
控制部50基于算出的回转半径小于第三阈值的判定,使对由差动控制装置35进行的差动的禁止或限制的功能工作。第三阈值例如是机动平地机1的最小回转半径。
控制部50在差动控制模式选择器62处于工作模式、解除模式及自动差动控制模式中的任一个状态的情况下,都算出机动平地机1的回转半径。
上述控制部50的具体结构如下。
如图3所示,控制部50具有回转半径算出部51、存储部52、差动控制模式识别部53、差动控制装置的工作/解除判定部54、以及差动控制装置指令部55。
回转半径算出部51基于由IMU30a测定出的回转角速度ω和由车速传感器30b测定出的机动平地机1的移动速度v,算出后轮12的中心的回转半径R(=v/ω)。回转半径算出部51将算出的回转半径R向工作/解除判定部54或存储部52输出。
在此,如图5所示,后轮12的中心的回转半径是指后轮12的右轮12R和左轮12L的中心(后轮中心)C1的回转半径。
如图3所示,在从回转半径算出部51向存储部52输出了回转半径R的情况下,存储部52存储该回转半径R。另外,存储部52存储有后述的用于判定使对由差动控制装置35进行的差动的禁止或限制的功能工作还是解除的阈值。作为该阈值,存储部52例如存储有机动平地机1在半转向时的回转半径和最小回转半径(第三阈值)。
作为机动平地机1在半转向时的回转半径,例如将转向角β(图6)为其最大值的1/2时的回转半径(第一阈值)、或者铰接角α(图6)为其最大值的1/2时的回转半径(第二阈值)存储于存储部52。另外,作为机动平地机1在半转向时的回转半径,例如也可以将转向角β为其最大值的1/2且铰接角α为其最大值的1/2时的回转半径存储于存储部52。另外,作为机动平地机1在半转向时的回转半径,例如也可以将15m的回转半径存储于存储部52。
另外,作为机动平地机1的最小回转半径,例如将转向角β为最大值且铰接角α为最大值时的回转半径存储于存储部52。另外,作为机动平地机1的最小回转半径,例如也可以将4.5m的回转半径存储于存储部52。
上述中的转向角β的最大值是指如图6所示那样使前轮11从直线前进状态最大限度旋转时的最大转向角。另外,上述中的铰接角α的最大值是指如图6所示那样使前框架22从直线前进状态相对于后框架21最大限度旋转时的最大铰接角。
上述中的机动平地机1在半转向时的回转半径和最小回转半径分别基于以下的式算出。
[式1]
如图6所示,在上式中,R是回转半径(单位m),A是铰接销24与后轮12的驱动轴中心的距离(单位m),L是轴距(单位m)。α是铰接角(单位rad),β是转向角(单位rad),T
在根据上式算出机动平地机1在半转向时的回转半径的情况下,将转向角的最大值的1/2的值代入β,并且将0代入α。另外,在根据上式算出机动平地机1在半转向时的回转半径的情况下,也可以将铰接角的最大值的1/2的值代入α,并且将0代入β。
另外,在根据上式算出机动平地机1在半转向时的回转半径的情况下,也可以将转向角的最大值的1/2的值代入β,并且将铰接角的最大值的1/2的值代入α。
在根据上式算出机动平地机1的最小回转半径的情况下,将转向角的最大值代入β,并且将铰接角的最大值代入α。
上述阈值等可以在机动平地机1出厂时预先存储于存储部52,另外,也可以在出厂后从外部存储于存储部52。另外,上述阈值也可以通过与外部之间的无线通信和有线通信中的任一个通信手段存储于存储部52。另外,也可以通过将其他存储介质与存储部52直接连接,从而将上述阈值存储于存储部52。
差动控制模式识别部53接收从差动控制模式选择器62的开关操作检出部62b输出的检测信号,从而识别由差动控制模式选择器62设定的模式。具体而言,差动控制模式识别部53识别在差动控制模式选择器62中设定了工作模式、解除模式及自动差动控制模式中的哪一个。
差动控制模式识别部53在识别出差动控制模式选择器62中所设定的模式(工作模式、解除模式、自动差动控制模式)之后,将该识别出的模式的信号向差动控制装置指令部55及工作/解除判定部54输出。
差动控制模式识别部53在识别出工作模式的情况下,将该识别出的信号向差动控制装置指令部55输出。差动控制装置指令部55在接收工作模式的识别信号时,将使对由差动控制装置35进行的差动的禁止或限制的功能工作的控制信号向差动控制装置35输出。
另外,差动控制模式识别部53在识别出解除模式的情况下,将该识别出的信号向差动控制装置指令部55输出。差动控制装置指令部55在接收解除模式的识别信号时,将使对由差动控制装置35进行的差动的禁止或限制的功能解除的控制信号向差动控制装置35输出。
另外,差动控制模式识别部53在识别出自动差动控制模式的情况下,将该识别出的信号向工作/解除判定部54输出。工作/解除判定部54在接收自动差动控制模式的识别信号时,判定使对由差动控制装置35进行的差动的禁止或限制的功能工作还是解除,并将表示该判定结果的信号向差动控制装置指令部55输出。
工作/解除判定部54在判定使对由差动控制装置35进行的差动的禁止或限制的功能工作还是解除时,判定机动平地机1是否正在回转。因此,工作/解除判定部54具有回转判定部54a。
回转判定部54a从差动控制模式识别部53接收自动差动控制模式的识别信号,并判定机动平地机1是否为回转状态。需要说明的是,回转判定部54a不管在差动控制模式选择器62中所设定的模式是工作模式、解除模式、自动差动控制模式中的哪一个模式,都算出回转半径。
回转判定部54a基于由回转半径算出部51算出的回转半径是否为例如机动平地机1的最小回转半径以上且半转向时的回转半径以下,来进行是否为回转状态的判定。
在本公开中,在回转半径为例如机动平地机1的最小回转半径以上且半转向时的回转半径以下的情况下,该状态为稳定回转状态。另外,在回转半径小于机动平地机1的最小回转半径的情况下,该状态是旋转或过度转向的状态。
基于由回转半径算出部51算出的回转半径是否为例如转向角β的最大值的1/2时的回转半径以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。在该情况下,在由回转半径算出部51算出的回转半径为转向角β的最大值的1/2时的回转半径以下时,判定为该回转半径为半转向时的回转半径以下。
另外,也可以基于由回转半径算出部51算出的回转半径是否为例如铰接角α的最大值的1/2时的回转半径以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。在该情况下,在由回转半径算出部51算出的回转半径为铰接角α的最大值的1/2时的回转半径以下时,判定为该回转半径为半转向时的回转半径以下。
另外,也可以基于由回转半径算出部51算出的回转半径是否为例如转向角β的最大值的1/2时的回转半径以下且铰接角α的最大值的1/2时的回转半径以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。在该情况下,在由回转半径算出部51算出的回转半径为转向角β的最大值的1/2时的回转半径以下且铰接角α的最大值的1/2时的回转半径以下时,判定为该回转半径为半转向时的回转半径以下。
另外,也可以基于由回转半径算出部51算出的回转半径是否为例如15m以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。在该情况下,在由回转半径算出部51算出的回转半径为15m以下时,判定为该回转半径为半转向时的回转半径以下。
需要说明的是,回转判定部54a在进行上述判定时,参照存储于存储部52的半转向时的回转半径。另外,回转判定部54a在进行上述判定时,参照存储于存储部52的转向角β的最大值的1/2时的回转半径和铰接角α的最大值的1/2时的回转半径中至少一方的回转半径。另外,回转判定部54a在进行上述判定时,参照存储于存储部52的例如15m的回转半径。
回转判定部54a在判定为上述中回转半径为机动平地机1在半转向时的回转半径以下的状态未持续规定时间(例如0.5秒)时,将该判定信号向差动控制装置指令部55输出。
差动控制装置指令部55在接收了上述判定信号时,将使对由差动控制装置35进行的差动的禁止或限制的功能工作的控制信号向差动控制装置35输出。
回转判定部54a在判定为上述中回转半径为机动平地机1在半转向时的回转半径以下的状态持续了规定时间(例如0.5秒)时,接下来进行该回转半径是否小于机动平地机1的最小回转半径的判定。
基于由回转半径算出部51算出的回转半径是否小于例如转向角β和铰接角α双方为最大值时的回转半径,来进行回转半径是否小于机动平地机1的最小回转半径的判定。
在该情况下,在由回转半径算出部51算出的回转半径小于转向角β和铰接角α双方为最大值时的回转半径时,判定为该回转半径小于机动平地机1的最小回转半径。
另外,也可以基于由回转半径算出部51算出的回转半径是否小于例如4.5m,来进行回转半径是否小于机动平地机1的最小回转半径的判定。
在该情况下,在由回转半径算出部51算出的回转半径小于4.5m时,判定为该回转半径小于机动平地机1的最小回转半径。
需要说明的是,回转判定部54a在进行上述判定时,参照存储于存储部52的机动平地机1的最小回转半径。另外,回转判定部54a在进行上述判定时,参照存储于存储部52的例如4.5m的回转半径。
回转判定部54a在判定为上述中回转半径小于机动平地机1的最小回转半径的状态持续了规定时间(例如0.5秒)时,将该判定信号向差动控制装置指令部55输出。
差动控制装置指令部55在接收了上述判定信号时,将使对由差动控制装置35进行的差动的禁止或限制的功能工作的控制信号向差动控制装置35输出。
回转判定部54a在判定为上述中回转半径小于机动平地机1的最小回转半径的状态未持续规定时间(例如0.5秒)时,将该判定信号向差动控制装置指令部55输出。
差动控制装置指令部55在接收了上述判定信号时,将使对由差动控制装置35进行的差动的禁止或限制的功能解除的控制信号(解除信号)向差动控制装置35输出。
差动控制装置35在从差动控制装置指令部55接收上述工作信号时,使阀35a控制离合器35b的动作,由此成为差动控制接通的状态。差动控制接通的状态是指对由差动控制装置35进行的差动的限制或禁止的功能正在工作的状态。在该状态下,右轮12R与左轮12L的差动被差动控制装置35限制或禁止。
另外,差动控制装置35在从差动控制装置指令部55接收上述解除信号时,使阀35a控制离合器35b的动作,由此成为差动控制断开的状态。差动控制断开的状态是指对由差动控制装置35进行的差动的限制或禁止的功能被解除的状态。在该状态下,右轮12R与左轮12L的差动没有被差动控制装置35限制或禁止。
如上所述,控制部50基于由传感器构件30检测到的回转角速度,判定机动平地机1的回转,并在回转时控制对由差动控制装置35进行的差动的禁止或限制。
<行驶的控制方法>
接下来,使用图3及图4对一实施方式中的行驶的控制方法进行说明。
图4是示出一实施方式中的机动平地机的行驶轮的控制方法的流程图。如图3及图4所示,机动平地机1的回转角速度ω由传感器构件30(IMU30a)检测(步骤S1a:图4)。机动平地机1的移动速度v由传感器构件30(车速传感器30b)检测(步骤S1b:图4)。机动平地机1的移动速度v也可以由IMU30a检测。
由控制部50的回转半径算出部51根据检测到的回转角速度ω及移动速度v,算出回转半径R(步骤S2:图4)。通过将移动速度v除以回转角速度ω,算出回转半径R。
由差动控制模式识别部53来识别由差动控制模式选择器62设定的模式是哪一个模式(步骤S3:图4)。由差动控制模式识别部53来识别工作模式、解除模式及自动差动控制模式中的任一个模式。
在差动控制模式识别部53识别出工作模式的情况下,差动控制装置35成为上述差动控制接通的状态。另外,在差动控制模式识别部53识别出解除模式的情况下,差动控制装置35成为上述差动控制断开的状态。
另外,在差动控制模式识别部53识别出自动差动控制模式的情况下,接收了该自动差动控制模式的识别信号的工作/解除判定部54基于上述中检测到的回转角速度来判定机动平地机1的回转,并在回转时控制对右轮12R和左轮12L的差动的禁止或限制(步骤S4:图4)。
工作/解除判定部54在判定使对由差动控制装置35进行的差动的禁止或限制的功能工作还是解除时,判定机动平地机1是否正在回转(步骤S4:图4)。
在上述回转状态的判定中,首先,由工作/解除判定部54进行半转向时的回转半径以下的回转半径是否持续了规定时间(例如0.5秒)的判定(步骤S4a:图4)。
基于由回转半径算出部51算出的回转半径是否为例如转向角β的最大值的1/2时的回转半径以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。在该判定中,在由回转半径算出部51算出的回转半径R为转向角β的最大值的1/2时的回转半径以下的情况下,判定为该回转半径为半转向时的回转半径以下。另外,在上述判定中,在由回转半径算出部51算出的回转半径R比转向角β的最大值的1/2时的回转半径大的情况下,判定为该回转半径不为半转向时的回转半径以下。
另外,也可以基于由回转半径算出部51算出的回转半径是否为例如铰接角α的最大值的1/2时的回转半径以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。在该判定中,在由回转半径算出部51算出的回转半径R为铰接角α的最大值的1/2时的回转半径以下的情况下,判定为该回转半径为半转向时的回转半径以下。另外,在上述判定中,在由回转半径算出部51算出的回转半径R比铰接角α的最大值的1/2时的回转半径大的情况下,判定为该回转半径不为半转向时的回转半径以下。
另外,也可以基于由回转半径算出部51算出的回转半径是否为例如转向角β的最大值的1/2时的回转半径以下且铰接角α的最大值的1/2时的回转半径以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。
另外,也可以基于由回转半径算出部51算出的回转半径是否为例如15m以下,来进行回转半径是否为机动平地机1在半转向时的回转半径以下的判定。在该判定中,在由回转半径算出部51算出的回转半径为15m以下的情况下,判定为该回转半径为半转向时的回转半径以下。另外,在上述判定中,在由回转半径算出部51算出的回转半径比15m大的情况下,判定为该回转半径不为半转向时的回转半径以下。
在判定为上述中半转向时的回转半径以下的回转半径未持续规定时间(例如0.5秒)的情况下,对由差动控制装置35进行的差动的禁止或限制的功能成为接通状态(差动控制接通状态)。
另外,在判定为上述中半转向时的回转半径以下的回转半径持续了规定时间的情况下,接下来,进行在由回转半径算出部51算出的回转半径小于最小回转半径的状态下是否持续了规定时间(例如0.5秒)的判定(步骤S4b:图4)。
基于由回转半径算出部51算出的回转半径是否小于转向角β和铰接角α双方为最大值时的回转半径,来进行回转半径是否小于机动平地机1的最小回转半径的判定。在该判定中,在由回转半径算出部51算出的回转半径小于转向角β和铰接角α双方为最大值时的回转半径的情况下,判定为该回转半径小于最小回转半径。另外,在上述判定中,在由回转半径算出部51算出的回转半径R为转向角β和铰接角α双方为最大值时的回转半径以上的情况下,判定为该回转半径不小于最小回转半径。
在上述中,在判定为小于最小回转半径的回转半径持续了规定时间(例如0.5秒)的情况下,对由差动控制装置35进行的差动的禁止或限制的功能成为接通状态(差动控制接通状态)。
另外,在判定为上述中小于最小回转半径的回转半径未持续规定时间的情况下,对由差动控制装置35进行的差动的禁止或限制的功能成为断开状态(差动控制断开状态)。由此,能够容易地从回转时的滑移状态脱离。
<本实施方式中的效果>
在本实施方式中,如图3所示,控制部50基于由传感器构件30检测到的回转角速度来判定机动平地机1的回转,并在回转时控制对由差动控制装置35进行的差动的禁止或限制的功能。因此,在回转时例如控制部50在判定为后轮12的右轮12R和左轮12L中的任一个滑移的情况下,能够使对由差动控制装置35进行的差动的禁止或限制的功能工作。因此,即使右轮12R和左轮12L中的任一方车轮因滑移而空转,也能够向接地的其他车轮传递驱动力,从而容易从滑移脱离。
另外,在回转时后轮12不滑移的稳定回转状态的情况下,控制部50解除对由差动控制装置35进行的差动的禁止或限制的功能(不使其工作)。由此,在通常回转时,通过差动装置33而能够在回转中使外侧的车轮的转速比内侧的车轮的转速大。因此,能够减轻车轮的磨损、对驱动轴的负担等。
机动平地机1的回转角速度由传感器构件30的例如IMU30a测定。IMU30a基本上在安装于机动平地机1的任意部分的情况下都能够测定机动平地机1的回转角速度。因此,可以将IMU30a配置于难以受到砂土等的影响的、例如远离行驶轮11、12及工作装置4的位置(例如驾驶室3的内部)。由此,IMU30a难以发生故障。
在上述实施方式中,如图3所示,控制部50基于由传感器构件30检测到的回转角速度和移动速度来算出回转半径,并基于算出的回转半径来控制对由差动控制装置35进行的差动的禁止或限制的功能。这样,能够基于回转角速度来算出回转半径。
在上述实施方式中,如图3所示,控制部50通过由回转半径算出部51算出的回转半径与存储于存储部52的阈值之间的比较来判定回转,并基于该比较来控制对由差动控制装置35进行的差动的禁止或限制的功能。由此,能够进行回转的判定。
在上述实施方式中,如图3所示,存储于存储部52的上述阈值包含第一阈值。第一阈值是机动平地机1中的转向角β为转向角的最大值的1/2时的机动平地机1的回转半径。控制部50基于由回转半径算出部51算出的回转半径为上述第一阈值以下的判定,解除对由差动控制装置35进行的差动的禁止或限制的功能。由此,在判定为回转的情况下能够解除对由差动控制装置35进行的差动的禁止或限制的功能,并能够在回转中使外侧的车轮的转速比内侧的车轮的转速大。因此,能够减轻车轮的磨损、对驱动轴的负担等。
在上述实施方式中,如图3所示,存储于存储部52的上述阈值包含第二阈值。第二阈值是机动平地机1中的铰接角α为铰接角的最大值的1/2时的机动平地机1的回转半径。控制部50基于由回转半径算出部51算出的回转半径为上述第二阈值以下的判定,解除对由差动控制装置35进行的差动的禁止或限制的功能。由此,在判定为回转的情况下能够解除对由差动控制装置35进行的差动的禁止或限制的功能,并能够在回转中使外侧的车轮的转速比内侧的车轮的转速大。因此,能够减轻车轮的磨损、对驱动轴的负担等。
在上述实施方式中,如图3所示,存储于存储部52的阈值包含第三阈值。第三阈值是机动平地机1的最小回转半径。控制部50基于由回转半径算出部51算出的回转半径为上述第三阈值以上的判定,解除对由差动控制装置35进行的差动的禁止或限制的功能。由此,在判定为回转的情况下,能够解除对由差动控制装置35进行的差动的禁止或限制的功能,并能够在回转中使外侧的车轮的转速比内侧的车轮的转速大。因此,能够减轻车轮的磨损、对驱动轴的负担等。
在上述实施方式中,如图3所示,即使在差动控制模式选择器62处于工作模式、解除模式及自动差动控制模式中的任一个状态的情况下,控制部50都算出回转半径。由此,即使在任一个状态下,都能够得知回转半径。
在上述实施方式中,对后轮12的右轮12R和左轮12L的控制进行了说明,但在本公开中只要是驱动轮,也能够应用于右前轮11R和左前轮11L。
在上述实施方式中,作为作业机械对机动平地机1进行了说明,但本公开也能够应用于铰接式自卸车(articulated dump)、刚性自卸车(rigid dump)、轮式装载机。
本次公开的实施方式应当被认为在所有方面均为例示而不是限制性的。本发明的范围不由上述说明而是由技术方案来表示,意在包括与技术方案等同的意思和范围内的所有变更。
附图标记说明:
1机动平地机,2车身框架,2F前端,2R后端,3驾驶室,4工作装置,6发动机室,7转向缸,11前轮,11L左前轮,11R右前轮,12后轮,12L左轮,12R右轮,21后框架,22前框架,23铰接缸,24中心销,25外装罩,26配重,30传感器构件,30b车速传感器,31发动机,32变速器,33差动装置,33a驱动小齿轮,33b锥齿轮,33c差速器壳体,33d小齿轮,33eL、33eR侧齿轮,34L左串联式装置,34R右串联式装置,35差动控制装置,35a阀,35b离合器,40牵引杆,41回转环,42推土铲,44提升缸,49液压马达,50控制部,51回转半径算出部,52存储部,53差动控制模式识别部,54工作/解除判定部,54a回转判定部,54b滑移判定部,55差动控制装置指令部,62差动控制模式选择器,62a开关操作构件,62b开关操作检出部。
- 作业机械的锁定控制系统与作业机械的锁定控制方法及作业机械以及作业机械的锁定控制装置与作业机械的锁定控制管理装置
- 作业机械的控制系统、作业机械、作业机械的管理系统和作业机械的控制方法