用于机动车的倒车指示方法、倒车指示系统以及机动车
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及用于机动车的倒车指示方法、倒车指示系统以及机动车。
背景技术
通常,在机动车倒车时,倒车灯会自动亮起闪烁,有时兼具方向灯和声音等提示。此时在该机动车附近的交通参与者(如行人和其他车辆)获悉,该机动车要进行倒车行驶,然而对具体的倒车路线却无法清楚地判断。例如在大型停车场中,大、中、小型客车的倒车转弯的路线各不相同,即,越大型客车的转弯半径越大,倒车区域越大,越小型客车的转弯半径越小,倒车区域越小。较严重的情况是,大型客车的倒车转弯路线和区域相对较大,在有限的空间内,后方的行人能选择避让的安全区域就非常小。对于机动车后方的行人来说,如何安全地避让是一个难题。
针对机动车外部环境中的其他交通参与者,现有技术采用的用于机动车的倒车指示方法包括:倒车灯提示或结合方向灯、声音的提示。然而,这些方法对于前述现象没有起到明显的改善作用。对于行人或其他车辆而言,只能从正在倒车的机动车的倒车灯或发出的声音获取机动车倒车的信息,却不能了解具体的倒车轨迹。尤其在能躲避的空间非常有限时,行人可能由于无法判断机动车具体的倒车轨迹而被车辆刮蹭、甚至撞倒。
有鉴于此,如何能提供一种更完善的倒车指示方法以给机动车外部环境中的其他交通参与者带来便利且提高安全性是本领域技术人员亟待解决的技术问题。
发明内容
因此,本发明的目的是提供一种用于机动车的倒车指示方法,通过该倒车指示方法能够使其他交通参与者清楚准确地识别机动车的当前倒车轨迹,及时避让;尤其在躲避范围较小的情况下,准确快速地避让到安全区域中。
为了解决上述技术问题,本发明采用的技术方案是:提供一种用于机动车的倒车指示方法,该倒车指示方法包括以下步骤:获取关于车身纵向方向与车轮朝向所成的夹角的数据信息;对该数据信息进行运算处理以生成当前倒车轨迹的图像的数据信息;将当前倒车轨迹的图像的数据信息转换成投影装置需要投影的中间图像的数据信息;根据该中间图像的数据信息,向投影装置发出投影指令,使得投影装置在地面上投影出当前倒车轨迹的图像。
根据本发明,通过向地面投影当前倒车轨迹的图像,能使其他交通参与者、如行人或其他车辆清楚地了解到该机动车要行驶的倒车轨迹和占用的倒车区域,由此立刻做出判断,快速避让到位于投影图像之外的安全区域中。
优选地,通过获取方向盘的旋转角度来获取关于车身纵向方向与车轮朝向所成的夹角的数据信息。根据本发明的一个技术方案,在倒车停车过程中,通常驾驶员先将方向盘转动到一定的旋转角度,根据该旋转角度,机动车的驱动车轮与车身纵向方向形成一个夹角(≥0°),在此获取这些夹角的数据信息。然后可结合机动车自身的参数(如:两个驱动轮之间的距离、前轮与后轮之间的距离、机动车转弯半径、机动车当前转向速度等等)计算出机动车车轮、尤其是后轮的当前轨迹,进一步综合得出机动车的当前倒车轨迹。方向盘的旋转角度的获得是容易实现的,由此能以简单可靠的方式得到所述的数据信息。
优选地,所述投影装置设置在车身的固定位置处,使投影装置距离地面的高度足以在机动车后方的地面上呈现当前倒车轨迹的图像。根据本发明,“投影装置”应该理解为一切能实现投影功能的投影设备、投影部件、投影模块等,具体例如为投影仪,但不局限于此。此外,投影装置也可以设置在车身后方的中间或两端的位置;投影装置可以包括多个投影仪,分别设置在车身的不同位置。这些不同的构造方案不是局限性的,只要能实现在车身后方投影出清楚的当前倒车轨迹的图像即可。
优选地,所述中间图像是投影装置在垂直于投影方向的一个虚拟的投影平面中所呈现的投影图像。通常情况下,投影装置的投影方向(即光源的发射方向)与相应的投影平面垂直时,投影图像最清晰。优选,所述虚拟的投影平面与投影在地面上的当前倒车轨迹的图像的靠近车辆的边缘相交,由此能够较简单地由当前倒车轨迹的图像的数据信息计算出中间图像的数据信息。在本发明的应用中,投影装置的投影方向与实际的投影平面、即地面形成较小的夹角,这是因为安装在车身上的投影装置距离地面较近,例如大约为后保险杠到地面的距离,而需要投影的图像要求尺寸很大,例如图像宽度至少与车身宽度相近,图像长度最好达到3米,以保证后方的行人和车辆及时避让。在这种情况下,经由中间图像的转换可以给投影装置输入合适的关于倒车轨迹的投影指令,以呈现与实际尺寸相符的倒车轨迹。
具体地说,由实际要投影的图像数据转换成理论上在垂直于投影方向的平面中所呈现的投影图像数据,即,中间图像,基于此再换算出应该输入给投影装置的初始图像数据。根据该原理,向投影装置发出投影指令。因此,投影指令是包括该初始图像数据的图像信息。
进一步优选地,当前倒车轨迹的图像可以是显示车轮轨迹的两条曲线,也可以是其他特定的图形,只要能清楚显示当前倒车轨迹即可。应该理解到,本发明提到的“曲线”也包括在直行倒车时呈现的“直线”轨迹。通过显示当前倒车轨迹,使其他的交通参与者清楚地看到机动车即将行走的路线,及时躲让避险。
另外,投影装置还可同时在地面上投影出一个例如以方框形式的危险区域图像,该危险区域图像具有较大的范围并且完全包围当前倒车轨迹的图像。其他交通参与者可根据该危险区域图像确定躲避的安全区域,以防躲避不及时而被车辆刮蹭、甚至撞倒。
由于机动车驾驶员在倒车过程中通常会不断地调整方向盘,因此当前倒车轨迹的图像未必能完美地反映实际的机动车倒车轨迹。考虑到当前倒车轨迹与实际倒车轨迹的偏差,危险区域图像的尺寸应选择得较大,以确保其他交通参与者的安全性。例如,危险区域图像的尺寸可以根据当前倒车轨迹的图像的尺寸确定,例如是包络当前倒车轨迹的矩形的面积的至少两倍。另外,危险区域图像的尺寸也可与机动车倒车的速度相关,当机动车速度较高时,危险区域图像的尺寸较大,而当机动车速度较低,危险区域图像的尺寸较小。这是因为当机动车速度较高时,其他交通参与者可用于躲避的时间较短,较大尺寸的危险区域图像可以使其他交通参与者及早地收到危险提示并且及早地躲避危险。
本发明的目的还在于提供一种用于机动车的倒车指示系统,该倒车指示系统用于执行本发明的用于机动车的倒车指示方法。该倒车指示系统包括:用以获取关于车身纵向方向与车轮朝向所成的夹角的数据信息的数据采集模块;用以对所述数据信息进行运算处理以生成当前倒车轨迹的图像的数据处理模块;将当前倒车轨迹的图像转换成投影装置需要投影的中间图像的图像转换模块;以及,根据所述中间图像的数据信息向所述投影装置发出投影指令的指令模块。该倒车指示系统还包括:根据所述投影指令向地面投影当前倒车轨迹的图像的投影装置。前述关于本发明的用于机动车的倒车指示方法的优选方案也适用于本发明的用于机动车的倒车指示系统。
本发明的目的还在于提供一种机动车,该机动车包括本发明的用于机动车的倒车指示系统。
通过本发明的用于机动车的倒车指示方法、倒车指示系统以及机动车,有效提高了机动车的倒车指示性能,特别是为其他交通参与者带来了便利,解决了由于不能清楚识别倒车轨迹而造成的因躲避不及时导致的碰撞等问题。
附图说明
下面根据附图详细阐述本发明。其中:
图1示出了本发明的用于机动车的倒车指示方法的一个实施例的流程图;
图2示出了根据本发明的用于机动车的倒车指示方法实现的当前倒车轨迹的图像的一个实施例的示意图;
图3示出了本发明的用于机动车的倒车指示系统的一个实施例的示意图;以及
图4示出了本发明的机动车组装有投影装置的一个实施例的示意图。
具体实施方式
图1示出了本发明的用于机动车的倒车指示方法的一个实施例的流程图。在该实施例中,该倒车指示方法包括以下步骤:获取关于车身纵向方向与车轮朝向所成的夹角的数据信息(步骤101);对该数据信息进行运算处理,以生成当前倒车轨迹的图像的数据信息(步骤102);将当前倒车轨迹的图像的数据信息转换成投影装置需要投影出的中间图像的数据信息(步骤103);根据该中间图像的数据信息,向投影装置发出投影指令,使得投影装置在地面上投影出当前倒车轨迹的图像(步骤104)。
在步骤101中,获取关于车身纵向方向与车轮朝向所成的夹角的数据信息。该步骤101尤其是通过获取方向盘的旋转角度来实现。例如,在倒车停车过程中,通常驾驶员先将方向盘转动到一定的旋转角度,根据该旋转角度,机动车的驱动车轮与车身纵向方向成一个夹角(≥0°),由此获取所述夹角的数据信息。
在步骤102中,对数据信息进行运算处理,生成当前倒车轨迹的图像的数据信息。这里的运算包括对每个车轮、尤其是后车轮的当前倒车轨迹的运算。在此,除了所获取的夹角数据信息之外,所述运算处理还可能需要使用机动车自身的参数,如:两个驱动轮之间的距离、前轮与后轮之间的距离、机动车转弯半径、机动车当前转向速度等等。当前倒车轨迹的图像是实际要呈现在地面上的“实时的倒车轨迹的图像”。当前倒车轨迹的图像随着车身纵向方向与车轮朝向所成的夹角的改变(进而随着方向盘的旋转角度的改变)而实时变化。当前倒车轨迹的图像可以是显示车轮轨迹的两条曲线,也可以是其他特定的图形,只要能清楚显示当前倒车轨迹即可。
在步骤103中,将当前倒车轨迹的图像的数据信息转换成投影装置需要投影出的中间图像的数据信息。根据一个优选的实施例,该中间图像是投影装置在垂直于投影方向的一个虚拟的投影平面中所呈现的投影图像(在下文结合图4将继续详述)。
在步骤104中,根据该中间图像的数据信息,向投影装置发出投影指令,使得投影装置在地面上投影出当前倒车轨迹的图像、例如以曲线呈现出的当前倒车轨迹的图像。除此之外,投影装置还可同时在地面上投影出一个例如以方框形式的危险区域图像,该危险区域图像具有较大的范围并且完全包围当前倒车轨迹的图像。危险区域图像的尺寸可以根据当前倒车轨迹的图像的尺寸确定,例如是包络当前倒车轨迹的矩形的面积的至少两倍。另外,危险区域图像的尺寸也可与机动车的速度相关,当机动车速度较高时,危险区域图像的尺寸较大,而当机动车速度较低,危险区域图像的尺寸较小。
投影指令是包括初始图像数据的图像信息。该初始图像数据对应于中间图像以及最终投影在地面上的当前倒车轨迹的图像和可选的危险区域图像。根据本发明,“投影装置”应该理解为一切能实现投影功能的投影设备、投影部件、投影模块等,具体例如为投影仪,但不局限于此。
图2示出了根据本发明的用于机动车的倒车指示方法实现的当前倒车指示图像的一个实施例的示意图。该实施例显示的当前倒车指示图像包括:虚线所示的方框区域、即危险区域图像以及在该方框区域中间的两条加粗的曲线、即当前倒车轨迹的图像2061。由此,其他的交通参与者可以清楚知道,该方框区域内是危险区域,两条曲线是车轮的行驶路线。此外,“曲线”在本发明中应该广义理解为还包括直线的可能性,因为机动车在倒车过程中也包括直行倒车的情况。该实施例还示出了投影装置206的位置,即安装在车身尾部的中间区域,但不局限于此。箭头R示出了车身纵向方向,箭头r示出了在此用作驱动轮的前轮100的车轮朝向,结合图1,在步骤101中,获取的数据信息包括车身纵向方向R与车轮朝向r所成的夹角α。
图3示出了本发明的用于机动车的倒车指示系统的一个实施例的示意图。该用于机动车的倒车指示系统200能够执行本发明的用于机动车的倒车指示方法。前述对应实现本发明的倒车指示方法的特征和功能同样适用于本发明的倒车指示系统。在该实施例中,倒车指示系统200包括:用以获取关于车身纵向方向与车轮朝向所成的夹角的数据采集模块201;用以对数据信息进行运算处理以生成当前倒车轨迹的图像的数据信息的数据处理模块202;将当前倒车轨迹的图像的数据信息转换成需要投影出的中间图像的数据信息的转换模块204;以及根据该中间图像的数据信息向投影装置206发出投影指令的指令模块205。该倒车指示系统200还包括:根据投影指令向地面投影当前倒车轨迹的图像和可选的危险区域图像的投影装置206。
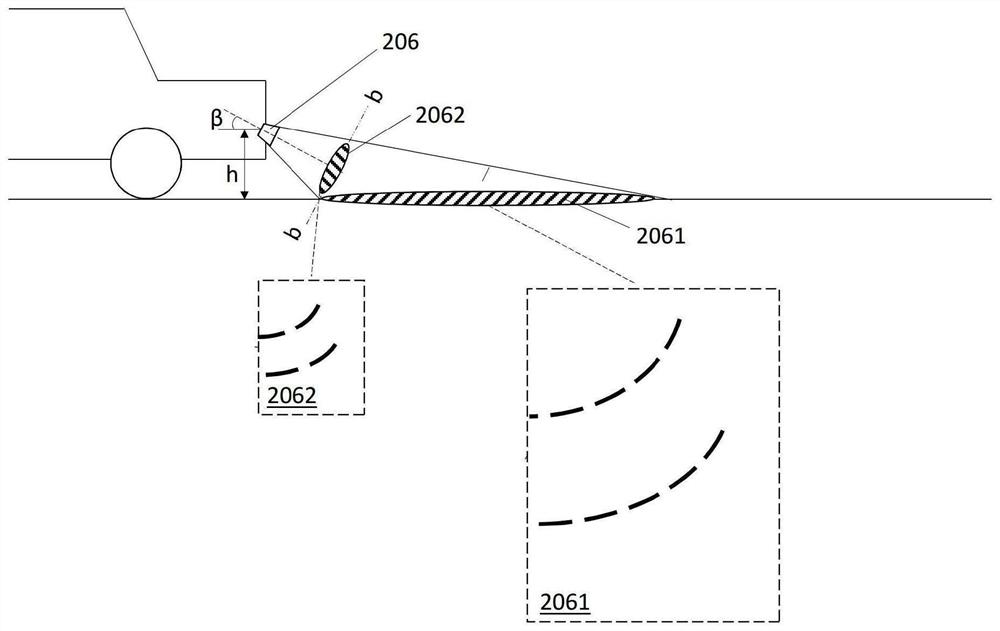
图4示出了根据本发明的机动车组装有投影装置的一个实施例的示意图。在该机动车中集成有前述根据本发明的用于机动车的倒车指示系统。在该实施例中,投影装置206设置在车身的固定位置处,投影装置206距离地面的高度h足以在机动车后方的地面上呈现当前倒车指示图像。根据投影装置206在不同机动车上的设置位置不同,高度h也选择不同的数值。这需要在将倒车指示系统组装在机动车上时预先设定。
同时,图4也示出了本发明的基本原理。图中各个部分的尺寸不作为限定本发明的标准;为了清楚说明,各个部分的尺寸比例未按实际示出,有的放大示出,有的缩小示出。为了能够在地面上投影当前倒车指示图像2061,投影装置206的投影方向与地面形成一个夹角β。该夹角β较小、例如小于15度,这是因为安装在车身上的投影装置206距离地面较近,例如大约为后保险杠到地面的距离,而需要投影的图像要求尺寸很大,例如图像宽度至少与车身宽度相近,长度至少为3米,以保证后方行人和车辆的安全距离。在这种情况下,经由中间图像2062的转换可以给投影装置206输入合适的关于倒车轨迹的投影指令(即对应于该中间图像2062的初始图像数据),以呈现与实际尺寸相符的当前倒车轨迹的图像2061。
而通常情况下,投影装置206的投影方向(即光源的发射方向)与相应的投影平面垂直时,投影图像最清晰。因此优选地,中间图像2062是投影装置206在垂直于投影方向的一个虚拟的投影平面b-b中所呈现的投影图像,特别优选地,该投影平面b-b与在地面上的倒车指示图像在该倒车指示图像的靠近车辆的边缘处相交。
在该实施例中,中间图像2062和投影在地面上的当前倒车轨迹的图像2061是显示车轮轨迹的两条曲线,也可以是其他特定的图形,只要能清楚显示当前倒车轨迹即可。另外,由于机动车驾驶员在倒车过程中通常会不断地调整方向盘,因此需持续地获取车身纵向方向与车轮朝向所成的夹角的数据信息,以便修正当前倒车轨迹的图像。
以上通过具体实施例对本发明的原理和实施方式进行了阐述,但这些具体实施例仅限于解释说明,不限定本发明的保护范围。应当指出,对于本领域技术人员来说,在不背离本发明的原理的前提下,任何对本发明的改进和修饰均落入本发明权利要求保护的范围之中。
- 用于机动车的倒车指示方法、倒车指示系统以及机动车
- 用于机动车辆中的自动拖车倒车系统的方法和设备