一种基于三维测距的多人脸场景有效人脸识别装置及方法
文献发布时间:2023-06-19 10:27:30
技术领域
本发明涉及人脸识别技术领域,尤其涉及一种基于三维测距的多人脸场景有效人脸识别装置及方法。
背景技术
人脸识别技术越来越普及,现存有摄像头识别技术已经开始广泛应用于支付、认证等领域,但是针对多人脸场景目前还未有效的筛选方法。
发明内容
本发明的目的在于提供一种基于三维测距的多人脸场景有效人脸识别装置及方法,从而解决现有技术中存在的前述问题。
为了实现上述目的,本发明采用的技术方案如下:
一种基于三维测距的多人脸场景有效人脸识别装置,包括,
摄像头;用于采集当前场景的人脸RGB图像和人脸深度数据;
多人脸识别模块;用于循环检测摄像头输入的人脸RGB图像和人脸深度数据;并在检测到当前场景内存在多个人脸目标时,根据人脸RGB图像和人脸深度数据鉴定每个人脸目标是否都是可用人脸数据;
有效人脸捡拾模块;用于以摄像头的屏幕中心点为三维坐标起点建立坐标系,并对多人脸识别模块返回的各个人脸目标进行标记;并根据人脸深度数据依次标记各个人脸目标的三维坐标;根据各个人脸目标的三维坐标分别计算相应人脸目标与三维坐标起点之间的距离,并选取距离最短的人脸目标作为有效人脸数据。
S4、根据各个人脸目标的三维坐标分别计算相应人脸目标与三维坐标起点之间的距离,并选取距离最短的人脸目标作为有效人脸数据
本发明的目的还在于提供一种基于三维测距的多人脸场景有效人脸识别方法,人脸识别方法使用所述的人脸识别装置实现;所述人脸识别方法包括如下步骤,
S1、循环采集摄像头输入的当前场景的人脸RGB图像和人脸深度数据;
S2、多人脸识别模块循环检测当前场景的人脸RGB图像和人脸深度数据,当检测到当前场景存在多个人脸目标时,根据人脸RGB图像和人脸深度数据鉴定每个人脸目标是否都是可用人脸数据;若每个人脸目标都是可用人脸数据,则进入S3;否则重复返回步骤S1;
S3、有效人脸捡拾模块以摄像头的屏幕中心点为三维坐标起点建立坐标系,并对多人脸识别模块返回的各个人脸目标进行标记;并根据人脸深度数据依次标记各个人脸目标的三维坐标;
S4、根据各个人脸目标的三维坐标分别计算相应人脸目标与三维坐标起点之间的距离,并选取与三维坐标起点之间距离最短的人脸目标作为有效人脸数据;
S5、根据人脸捡拾模块返回的有效人脸数据进行相应的业务流程。
优选的,各个人脸目标与三维坐标起点之间距离的计算方式为,
FCM
FCX
其中,FCM
优选的,步骤S2中判断人脸目标是否为可用人脸数据的过程为,根据眼、口、鼻的特征判断是否为可用人脸数据,其中包括两个眼球中心点、四个眼角点、两个鼻孔的中点和两个嘴角点;若人脸目标存在上述所有的点,则表示该人脸目标为可用人脸数据。
本发明的有益效果是:可以解决常规3D摄像头处理多人脸场景中无法鉴证有效人脸的模式,能够快速的解决多人脸场景下有效人脸对象的鉴证,实现高效的支付流程,增强客户体验,可应用于金融支付、酒点、商场、安保等各行业人脸识别领域。
附图说明
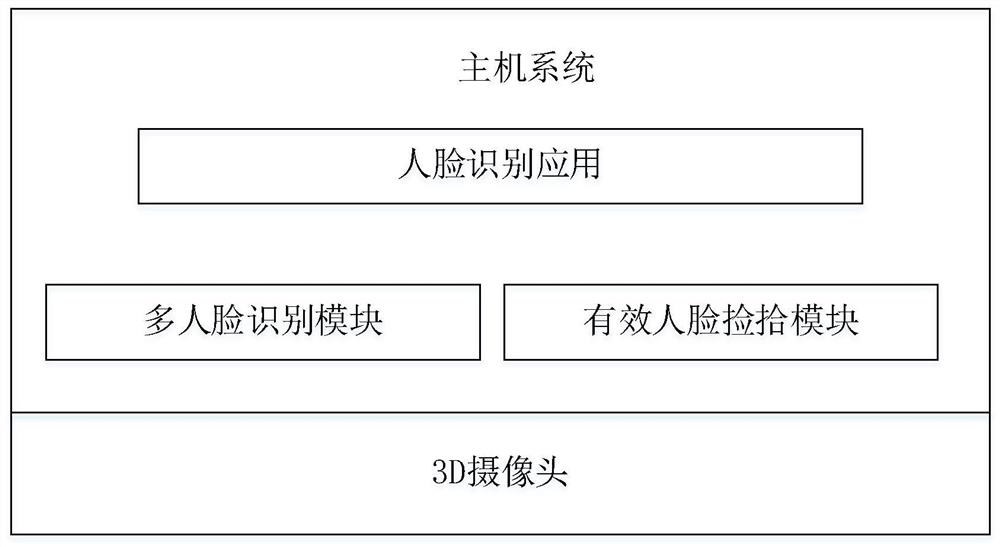
图1是本发明实施例中人脸识别装置的结构示意图;
图2是本发明实施例中人脸识别方法的流程示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
如图1所示,本实施例中,提供了一种基于三维测距的多人脸场景有效人脸识别装置,包括,
摄像头;用于采集当前场景的人脸RGB图像和人脸深度数据;
多人脸识别模块;用于循环检测摄像头输入的人脸RGB图像和人脸深度数据;并在检测到当前场景内存在多个人脸目标时,根据人脸RGB图像和人脸深度数据鉴定每个人脸目标是否都是可用人脸数据;
有效人脸捡拾模块;用于以摄像头的屏幕中心点为三维坐标起点建立坐标系,并对多人脸识别模块返回的各个人脸目标进行标记;并根据人脸深度数据依次标记各个人脸目标的三维坐标;根据各个人脸目标的三维坐标分别计算相应人脸目标与三维坐标起点之间的距离,并选取距离最短的人脸目标作为有效人脸数据。
S4、根据各个人脸目标的三维坐标分别计算相应人脸目标与三维坐标起点之间的距离,并选取距离最短的人脸目标作为有效人脸数据。
本实施例中,有效人脸识别装置具体包括主机系统和与主机系统相连的摄像头;主机系统中设置有多人脸识别模块和有效人脸捡拾模块,同时还设置有用于调用多人脸识别模块和有效人脸捡拾模块工作的人脸识别应用。
人脸识别装置的工作过程为:主机系统启动人脸识别应用,摄像头采集屏幕前的人脸RGB图像和人脸深度数据并输入,多人脸识别模块根据摄像头输入的人脸RGB图像,获取相应的人脸深度数据,有效人脸捡拾模块根据多人脸识别模块返回的人脸深度数据计算各个人脸目标距离屏幕中心点的三维距离,并筛选出距离屏幕中心点最近的人脸目标,并将该人脸目标作为有效的人脸目标进行人脸支付,若否,则再次进入多人脸识别流程。
本实施例中,摄像头为3D摄像头。
本实施例中,多人脸识别模块能够根据3D摄像头反馈的人脸RGB图像和人脸深度数据,进行清晰度、角度、表情等判断进行清晰人脸数据抓拍、获取相应人脸深度数据。
实施例二
本实施例中,提供了一种基于三维测距的多人脸场景有效人脸识别方法,人脸识别方法使用所述的人脸识别装置实现;所述人脸识别方法包括如下步骤,
S1、循环采集摄像头输入的当前场景的人脸RGB图像和人脸深度数据;
S2、多人脸识别模块循环检测当前场景的人脸RGB图像和人脸深度数据,当检测到当前场景存在多个人脸目标时,根据人脸RGB图像和人脸深度数据鉴定每个人脸目标是否都是可用人脸数据;若每个人脸目标都是可用人脸数据,则进入S3;否则重复返回步骤S1;
S3、有效人脸捡拾模块以摄像头的屏幕中心点为三维坐标起点建立坐标系,并对多人脸识别模块返回的各个人脸目标进行标记;并根据人脸深度数据依次标记各个人脸目标的三维坐标;
S4、根据各个人脸目标的三维坐标分别计算相应人脸目标与三维坐标起点之间的距离,并选取与三维坐标起点之间距离最短的人脸目标作为有效人脸数据;
S5、根据人脸捡拾模块返回的有效人脸数据进行相应的业务流程。
本实施例中,步骤S2中判断人脸目标是否为可用人脸数据的过程为,根据眼、口、鼻的特征判断是否为可用人脸数据,其中包括两个眼球中心点、四个眼角点、两个鼻孔的中点和两个嘴角点;若人脸目标存在上述所有的点,则表示该人脸目标为可用人脸数据。
本实施例中,若当前场景中只存在一个人脸目标时,则同样需要鉴定该人脸目标是否是可用人脸数据,若可用,则读取该人脸目标,进入相应的业务程序;否则,重新识别。
本实施例中,各个人脸目标与三维坐标起点之间距离的计算方式为,
FCM
FCX
其中,FCM
通过采用本发明公开的上述技术方案,得到了如下有益的效果:
本发明提供了一种基于三维测距的多人脸场景有效人脸识别装置及方法;可以解决常规3D摄像头处理多人脸场景中无法鉴证有效人脸的模式,能够快速的解决多人脸场景下有效人脸对象的鉴证,实现高效的支付流程,增强客户体验,可应用于金融支付、酒点、商场、安保等各行业人脸识别领域。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本发明的保护范围。
- 一种基于三维测距的多人脸场景有效人脸识别装置及方法
- 一种基于人脸识别的人脸目标测距方法、装置及存储介质