建筑机械的机械臂翻转夹持机构
文献发布时间:2023-06-19 10:29:05
技术领域
本发明属于机械加工设备技术领域,更具体地说,特别涉及一种建筑机械的机械臂翻转夹持机构。
背景技术
建筑机械是工程建设和城乡建设所用机械设备的总称,在中国又称为“建设机械”、“工程机械”等,它由挖掘机械,铲土运输机械,压实机械,工程起重机械,桩工机械,路面机械,混凝土机械,混凝土制品机械,钢筋级预应力机械,装修机械,高空作业机械等多种机械组成。
例如申请号:CN202010193815.1本发明公开了一种大型建筑机械的机械臂翻转夹持机构,包括台架,所述台架的顶板的顶面的左部和右部均固定有升降机构,升降机构的升降块上均固定有旋转支撑架,旋转支撑架上安装有旋转夹持机构;所述台架的顶板的中部放置有待加工机械臂,两个旋转夹持机构的四个压紧板夹持在待加工机械臂的左右两端。本发明可以将大型建筑机械等工程机械中的机械臂进行夹持翻转,方便其在焊接完成后进行抛光、喷漆等工序,大大提高加工效果和效率。
基于上述专利的检索发现,目前,机械臂在焊接完成后,其需要进行进一步的加工,而上述夹持机构在应用时,虽然可以通过旋转夹持机构将机械臂进行翻转,但是上述夹持机构在实际的使用过程中还存在以下不足,如:1、由于上述夹持机构中的两个升降机构之间缺乏有效的距离调节机构,使得两个旋转夹持机构不能根据不同长度的机械臂进行灵活调节,进而降低了夹持机构的实用性;2、上述夹持机构在将机械臂进行翻转时,由于是直接通过旋转主电机带动的,使得机械臂在翻转时稳定性较差,且翻转后由于缺乏有效的锁紧结构,一旦发生停电等现象,就会带来安全隐患,进而降低了夹持机构的安全性;3、上述耐磨套在磨损严重后,不易被人们及时发现,继续磨损后从而就会降低放置板使用时的稳定性。
发明内容
为了解决上述技术问题,本发明提供一种建筑机械的机械臂翻转夹持机构,以解决上述夹持机构在实际的使用过程中还存在以下不足,如:1、由于上述夹持机构中的两个升降机构之间缺乏有效的距离调节机构,使得两个旋转夹持机构不能根据不同长度的机械臂进行灵活调节,进而降低了夹持机构的实用性;2、上述夹持机构在将机械臂进行翻转时,由于是直接通过旋转主电机带动的,使得机械臂在翻转时稳定性较差,且翻转后由于缺乏有效的锁紧结构,一旦发生停电等现象,就会带来安全隐患,进而降低了夹持机构的安全性;3、上述耐磨套在磨损严重后,不易被人们及时发现,继续磨损后从而就会降低放置板使用时的稳定性的问题。
本发明一种建筑机械的机械臂翻转夹持机构的目的与功效,由以下具体技术手段所达成:
一种建筑机械的机械臂翻转夹持机构,包括台架,所述台架上端面呈前后对称状设有两个匚型滑轨,且台架上部设置有距离调节机构,所述距离调节机构包括调节电机、距离调节螺杆、移动板和定向轮,所述调节电机安装在台架上端面左侧,且调节电机通过转轴转动连接有距离调节螺杆,所述距离调节螺杆外部设有两处反向螺纹,且距离调节螺杆外部通过两处反向螺纹连接有两个移动板,每个所述移动板底端面中部均设有与距离调节螺杆螺纹相连接的螺纹筒,每个所述移动板底端面四个夹角处均安装有一个定向轮,且每个移动板上端面均设有一个升降机构;每个所述升降机构上端面均固定安装有一个角度调节机构;两个所述角度调节机构相对端均设有一个旋转夹持机构,且两个旋转夹持机构之间夹持有机械臂;所述台架中侧设有放置板,且放置板底端面四个夹角处均设有一根限位滑杆;所述台架上端面中部呈左右对称状开设有四个螺纹通孔;所述台架上端面中部呈均匀状开设有八个矩形卡接口;所述放置板底部每根限位滑杆外部均滑动连接有安装在台架内部的一个耐磨套。
进一步的,当所述距离调节机构与匚型滑轨处于安装状态时,移动板上四个定向轮分别与两个匚型滑轨内侧底端面滚动相连接;
进一步的,所述升降机构包括匚型支架、升降电机、升降螺杆和升降螺母,所述匚型支架固定连接在移动板上端面,且匚型支架内侧呈前后对称状设有下端固定在移动板上端面的四根限位滑杆,所述匚型支架内侧通过四根限位滑杆滑动连接有升降机构,且匚型支架顶端面中心部位安装有升降电机,所述升降电机通过转轴转动连接有位于匚型支架内侧的升降螺杆,且升降螺杆外部通过螺纹连接有固定镶嵌在升降机构内部的升降螺母,所述匚型支架内侧四根限位滑杆外部均滑动连接有固定镶嵌在升降机构内部的滑筒;
进一步的,所述角度调节机构包括角度电机、转动轴、蜗轮和蜗杆,所述角度调节机构上端面安装有角度电机,且角度电机通过转轴转动连接有蜗杆,所述转动轴通过轴套转动连接在角度调节机构上部,所述转动轴一端设有与蜗杆相啮合的蜗轮,且转动轴另一端固定连接有旋转夹持机构,所述转动轴外周面与旋转夹持机构一侧面之间呈环形阵列状设有四个加强筋,所述蜗杆的展开螺旋角小于蜗轮蜗杆接触的摩擦角;
进一步的,所述旋转夹持机构包括压紧油缸和压紧板块,所述旋转夹持机构为矩形盒装结构,且所述旋转夹持机构上、下、前、后四个端面均安装有一个压紧油缸,且每个压紧油缸伸缩端均穿过旋转夹持机构外壁设有一个压紧板块,每个所述压紧板块压紧面均设有防滑条纹;
进一步的,所述放置板包括弹性调节板、弹性调节螺杆和调节螺母,所述放置板下部通过四根限位滑杆滑动连接有弹性调节板,且弹性调节板底端面通过转动套转动连接有一根弹性调节螺杆,所述弹性调节螺杆外部通过螺纹连接有固定镶嵌在台架内部的调节螺母,且弹性调节螺杆下端设有转动手轮,所述放置板下部四根限位滑杆外部位于弹性调节板上部均套接有一个弹簧,且放置板顶端面设有防护胶垫;
进一步的,所述耐磨套包括密封螺栓、安装板、白色粉末和弹性卡扣,所述耐磨套内部设有腔体,且耐磨套上端面开设有与内部相通的螺纹通孔,所述耐磨套内周面与腔体之间距离为耐磨套最大磨损厚度,所述耐磨套上螺纹通孔内通过螺纹连接有一个密封螺栓,且耐磨套底端面中心部位设有安装板,所述耐磨套内部填充有白色粉末,所述安装板上端面呈对称状开设有两个滑口,且两个滑口内均固定连接有两根滑动杆,每前后两根滑动杆外部均滑动连接有一个弹性卡扣,且每根滑动杆外部均套接有弹簧,当所述耐磨套与台架处于安装状态时,弹性卡扣与台架上矩形卡接口相卡接;
进一步的,当所述旋转夹持机构处于夹持状态时,旋转夹持机构上四个压紧板块压紧面分别与机械臂上、下、前、后四个端面紧密相接触。
与现有技术相比,本发明具有如下有益效果:
本发明通过距离调节机构的设置,当需要调节两个升降机构之间距离时,将调节电机启动,通过调节电机转轴带动距离调节螺杆转动,使两个移动板在两处反向螺纹作用下分别带动其上部的升降机构向相对或相背反向移动,从而使两个角度调节机构分别带动两个旋转夹持机构进行相对或相背方向移动,从而使得两个旋转夹持机构能够根据不同长度的机械臂进行灵活调节,进而提高了本夹持机构的实用性。
本发明通过角度调节机构的设置,当机械臂翻转时,通过两个升降机构将两个角度调节机构、两个旋转夹持机构及机械臂向上带动,然后启动角度电机,使蜗杆带动蜗轮转动,从而使转动轴带动旋转夹持机构转动,从而使机械臂得到翻转操作,且由于蜗杆的展开螺旋角小于蜗轮蜗杆接触的摩擦角,故使得蜗杆发生自锁,从而使得机械臂在翻转时具有更好的稳定性,且即使发生停电等现象,也不会带来安全隐患,进而提高了本夹持机构的安全性。
本发明通过在耐磨套内部填充有白色粉末,当耐磨套磨损严重后,耐磨套腔体内的白色粉末将会顺着耐磨套内周面磨损的缝隙泄漏出来,然后落在地面上,从而更容易被人们及时的发现,从而不会出现磨损后降低放置板使用时稳定性的问题。
附图说明
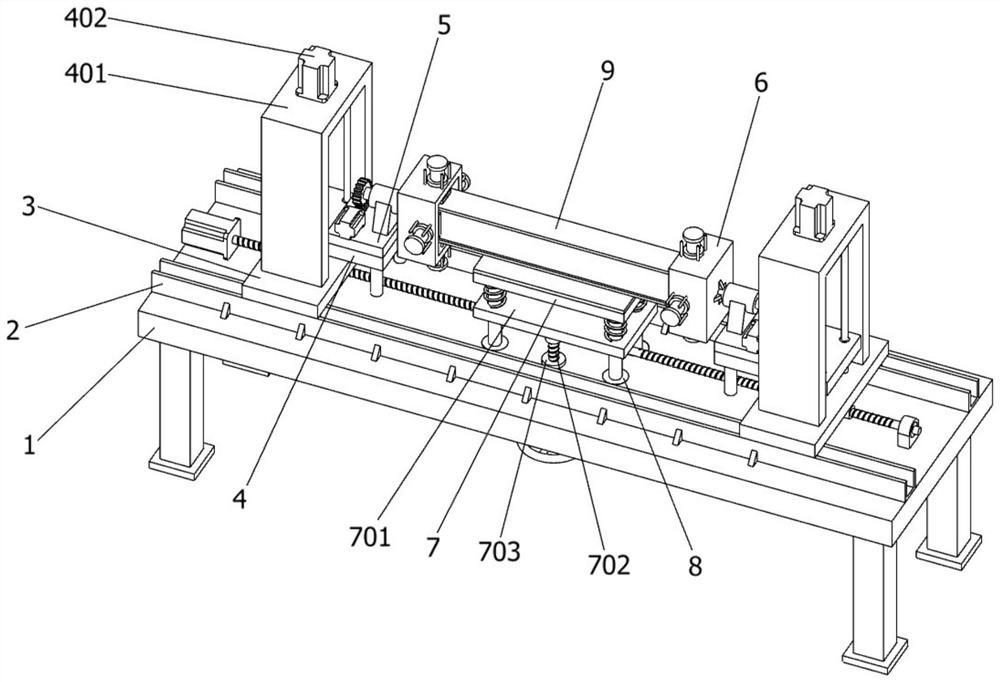
图1是本发明的轴视结构示意图。
图2是本发明的拆分状态下结构示意图。
图3是本发明的前视结构示意图。
图4是本发明的左视结构示意图。
图5是本发明的升降机构结构示意图。
图6是本发明的夹持机构结构示意图。
图7是本发明的耐磨套和密封螺栓拆分后结构示意图。
图8是本发明的耐磨套局部剖视结构示意图。
图中,部件名称与附图编号的对应关系为:
1、台架;2、匚型滑轨;3、距离调节机构;301、调节电机;302、距离调节螺杆;303、移动板;304、定向轮;4、升降机构;401、匚型支架;402、升降电机;403、升降螺杆;404、升降螺母;5、角度调节机构;501、角度电机;502、转动轴;503、蜗轮;504、蜗杆;6、旋转夹持机构;601、压紧油缸;602、压紧板块;7、放置板;701、弹性调节板;702、弹性调节螺杆;703、调节螺母;8、耐磨套;801、密封螺栓;802、安装板;803、白色粉末;804、弹性卡扣;9、机械臂。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图8所示:
本发明提供一种建筑机械的机械臂翻转夹持机构,包括有:台架1,台架1上端面呈前后对称状设有两个匚型滑轨2,且台架1上部设置有距离调节机构3,距离调节机构3包括调节电机301、距离调节螺杆302、移动板303和定向轮304,调节电机301安装在台架1上端面左侧,且调节电机301通过转轴转动连接有距离调节螺杆302,距离调节螺杆302外部设有两处反向螺纹,且距离调节螺杆302外部通过两处反向螺纹连接有两个移动板303,每个移动板303底端面中部均设有与距离调节螺杆302螺纹相连接的螺纹筒,每个移动板303底端面四个夹角处均安装有一个定向轮304,且每个移动板303上端面均设有一个升降机构4,升降机构4包括匚型支架401、升降电机402、升降螺杆403和升降螺母404,匚型支架401固定连接在移动板303上端面,且匚型支架401内侧呈前后对称状设有下端固定在移动板303上端面的四根限位滑杆,匚型支架401内侧通过四根限位滑杆滑动连接有升降机构4,且匚型支架401顶端面中心部位安装有升降电机402,升降电机402通过转轴转动连接有位于匚型支架401内侧的升降螺杆403,且升降螺杆403外部通过螺纹连接有固定镶嵌在升降机构4内部的升降螺母404,匚型支架401内侧四根限位滑杆外部均滑动连接有固定镶嵌在升降机构4内部的滑筒,使得升降机构4在升降时更加稳定;每个升降机构4上端面均固定安装有一个角度调节机构5,角度调节机构5包括角度电机501、转动轴502、蜗轮503和蜗杆504,角度调节机构5上端面安装有角度电机501,且角度电机501通过转轴转动连接有蜗杆504,转动轴502通过轴套转动连接在角度调节机构5上部,转动轴502一端设有与蜗杆504相啮合的蜗轮503,且转动轴502另一端固定连接有旋转夹持机构6,转动轴502外周面与旋转夹持机构6一侧面之间呈环形阵列状设有四个加强筋,蜗杆504的展开螺旋角小于蜗轮503蜗杆504接触的摩擦角,从而使蜗杆504发生自锁;两个角度调节机构5相对端均设有一个旋转夹持机构6,旋转夹持机构6包括压紧油缸601和压紧板块602,旋转夹持机构6为矩形盒装结构,且旋转夹持机构6上、下、前、后四个端面均安装有一个压紧油缸601,且每个压紧油缸601伸缩端均穿过旋转夹持机构6外壁设有一个压紧板块602,每个压紧板块602压紧面均设有防滑条纹;两个旋转夹持机构6之间夹持有机械臂9,当旋转夹持机构6处于夹持状态时,旋转夹持机构6上四个压紧板块602压紧面分别与机械臂9上、下、前、后四个端面紧密相接触,从使机械臂9在翻转时更加平稳;台架1中侧设有放置板7,且放置板7底端面四个夹角处均设有一根限位滑杆;台架1上端面中部呈左右对称状开设有四个螺纹通孔;台架1上端面中部呈均匀状开设有八个矩形卡接口;所述放置板7底部每根限位滑杆外部均滑动连接有安装在台架1内部的一个耐磨套8,耐磨套8包括密封螺栓801、安装板802、白色粉末803和弹性卡扣804,耐磨套8内部设有腔体,且耐磨套8上端面开设有与内部相通的螺纹通孔,耐磨套8内周面与腔体之间距离为耐磨套8最大磨损厚度,耐磨套8上螺纹通孔内通过螺纹连接有一个密封螺栓801,且耐磨套8底端面中心部位设有安装板802,耐磨套8内部填充有白色粉末803,安装板802上端面呈对称状开设有两个滑口,且两个滑口内均固定连接有两根滑动杆,每前后两根滑动杆外部均滑动连接有一个弹性卡扣804,且每根滑动杆外部均套接有弹簧,当耐磨套8与台架1处于安装状态时,弹性卡扣804与台架1上矩形卡接口相卡接。
其中,当距离调节机构3与匚型滑轨2处于安装状态时,移动板303上四个定向轮304分别与两个匚型滑轨2内侧底端面滚动相连接,使移动板303在匚型滑轨2上部移动时具有较小的摩擦损耗,且移动板303在移动时更加省力。
其中,放置板7包括弹性调节板701、弹性调节螺杆702和调节螺母703,放置板7下部通过四根限位滑杆滑动连接有弹性调节板701,且弹性调节板701底端面通过转动套转动连接有一根弹性调节螺杆702,弹性调节螺杆702外部通过螺纹连接有固定镶嵌在台架1内部的调节螺母703,且弹性调节螺杆702下端设有转动手轮,通过转动弹性调节螺杆702,使弹性调节螺杆702在螺纹作用下带动弹性调节板701上下移动,从而使弹性调节板701上的弹性得到有效调节,使得放置板7缓冲弹性可根据不同重量的机械臂9进行调节,放置板7下部四根限位滑杆外部位于弹性调节板701上部均套接有一个弹簧,且放置板7顶端面设有防护胶垫,降低机械臂9底端面与放置板7上端面的碰撞磨损。
使用时:当需要调节两个升降机构4之间距离时,将调节电机301启动,通过调节电机301转轴带动距离调节螺杆302转动,使两个移动板303在两处反向螺纹作用下分别带动其上部的升降机构4向相对或相背反向移动,从而使两个角度调节机构5分别带动两个旋转夹持机构6进行相对或相背方向移动,从而使得两个旋转夹持机构6能够根据不同长度的机械臂9进行灵活调节,进而提高了本夹持机构的实用性;
夹持机械臂9时,将机械臂9吊运至放置板7上,在放置板7上端面防护胶垫作用下,降低机械臂9底端面与放置板7上端面的碰撞磨损,然后通过两个旋转夹持机构6内的压紧油缸601伸缩杆带动四个压紧板块602分别将机械臂9两端的上、下、前、后四个端面夹持住,从使机械臂9在翻转时更加平稳,当机械臂9翻转时,通过两个升降机构4将两个角度调节机构5、两个旋转夹持机构6及机械臂9向上带动,然后启动角度电机501,使蜗杆504带动蜗轮503转动,从而使转动轴502带动旋转夹持机构6转动,从而使机械臂9得到翻转操作,且由于蜗杆504的展开螺旋角小于蜗轮503蜗杆504接触的摩擦角,故使得蜗杆504发生自锁,从而使得机械臂9在翻转时具有更好的稳定性,且即使发生停电等现象,也不会会带来安全隐患,进而提高了本夹持机构的安全性;
通过在耐磨套8内部填充有白色粉末803,当耐磨套8磨损严重后,耐磨套8腔体内的白色粉末803将会顺着耐磨套8内周面磨损的缝隙泄漏出来,然后落在地面上,从而更容易被人们及时的发现,从而不会出现磨损后降低放置板7使用时稳定性的问题。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 建筑机械的机械臂翻转夹持机构
- 一种大型建筑机械的机械臂翻转夹持机构