一种用于无人机探测的成像镜头
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及镜头技术领域,具体涉及一种用于无人机探测的成像镜头。
背景技术
随着图像无线传输技术的发展,在无人机(尤其是专业级无人机)上搭载摄像机镜头,使其在航拍、侦探、监视、通信、反潜、电子干扰等场合发挥着重要作用,成为民用、军事等行业的重要工具。但现有的无人机上搭载的镜头至少存在以下不足:
1、现有的无人机专业级别的成像镜头,会出现蓝紫边现象。
2、现有的无人机专业级别的成像镜头,结构冗长,重量大。
3、现有的无人机专业级别的成像镜头,在强光源环境下一般都存在鬼影,影响成像效果。
4、现有的无人机专业级别的成像镜头,镜头温漂量大,当温度扰动过大时,影响成像质量。
发明内容
本发明的目的在于提供一种用于无人机探测的成像镜头,以至少解决上述问题的其一。
为实现上述目的,本发明采用以下技术方案:
一种用于无人机探测的成像镜头,从物侧至像侧沿一光轴依次包括第一透镜至第十二透镜;所述第一透镜至第十二透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;
所述第一透镜具负屈光率,所述第一透镜的物侧面为凸面、像侧面为凹面;
所述第二透镜具正屈光率,所述第二透镜的物侧面为凸面、像侧面为凸面;
所述第三透镜具负屈光率,所述第三透镜的物侧面为凹面、像侧面为凹面;
所述第四透镜具负屈光率,所述第四透镜的物侧面为凹面、像侧面为凹面;
所述第五透镜具正屈光率,所述第五透镜的物侧面为凸面、像侧面为凸面;
所述第六透镜具正屈光率,所述第六透镜的物侧面为凸面、像侧面为凸面;
所述第七透镜具正屈光率,所述第七透镜的物侧面为平面、像侧面为凸面;
所述第八透镜具负屈光率,所述第八透镜的物侧面为凹面、像侧面为凹面;
所述第九透镜具负屈光率,所述第九透镜的物侧面为凸面、像侧面为凹面;
所述第十透镜具正屈光率,所述第十透镜的物侧面为凸面、像侧面为凸面;
所述第十一透镜具负屈光率,所述第十一透镜的物侧面为凹面、像侧面为凸面;
所述第十二透镜具正屈光率,所述第十二透镜的物侧面为凸面、像侧面为凸面;
该光学成像镜头具有屈光率的透镜只有上述十二片。
优选地,所述第一透镜至第九透镜的焦距满足以下条件:
-27<f1<-26, 15<f2<17, -13<f3<-12, -24<f4<-22,
12<f5<14, 16<f6<18, 17<f7<19, -13<f8<-11,
-48<f9<-37, 14<f10<16, -13<f11<-11, 25<f12<27,
其中f1、f2、f3、f4、f5、f6、f7、f8、f9、f10、f11、f12分别为第一透镜至第十二透镜的焦距值。
优选地,所述第一透镜至第十二透镜的焦距与镜头焦距的比值的绝对值分别满足以下条件:
1.85<|f1/f|<1.95, 1.15<|f2/f|<1.25,
0.85<|f3/f|<0.95, 1.6<|f4/f|<1.75,
0.9<|f5/f|<1.0, 1.25<|f6/f|<1.35,
1.25<|f7/f|<1.35, 0.85<|f8/f|<0.95,
2.6<|f9/f|<3.5, 1.0<|f10/f|<1.2,
0.8<|f11/f|<1.0, 1.85<|f12/f|<1.95。
优选地,所述第二透镜的像侧面与所述第三透镜的物侧面相互胶合,所述第四透镜的像侧面与所述第五透镜的物侧面相互胶合,所述第七透镜的像侧面与所述第八透镜的物侧面相互胶合,所述第十透镜的像侧面与所述第十一透镜的物侧面相互胶合。
优选地,所述第二透镜与第三透镜之间、所述第四透镜与第五透镜之间、所述第七透镜与第八透镜之间、所述第十透镜与第十一透镜之间组成的胶合镜片中,两镜片之间的色散系数均相差30以上。
优选地,所述第六透镜和第十二透镜均采用玻璃非球面镜片,其余透镜均采用玻璃球面透镜。
优选地,所述第三透镜、第五透镜、第六透镜、第十透镜均采用折射率温度系数dn/dt为负值的异常材料。
优选地,所述第八透镜和第九透镜像侧面的R值均大于22mm。
优选地,镜头还满足:TTL<60.0mm,其中,TTL为所述第一透镜的物侧面至成像面在光轴上的距离。
优选地,还包括光阑,所述光阑位于所述第三透镜与第四透镜之间。
采用上述技术方案后,本发明与背景技术相比,具有如下优点:
1、本发明沿物侧至像侧方向采用十二片透镜,并通过对各个透镜进行相应设计,很好的优化了色差,杜绝了蓝紫边现象。
2、本发明的CRA为6°,与sensor相匹配,色彩还原度好,照度均匀。
3、本发明通过控制镜片的R值,在强光源环境下很好地减弱了鬼影的能量,保证镜头的成像效果。
4、本发明温漂量小,可以很好保持各种温度环境下的工作状态,保证镜头的成像质量。
5、光学总长为59.6mm,重量约为70g,重量轻,结构紧凑,实用性强。
附图说明
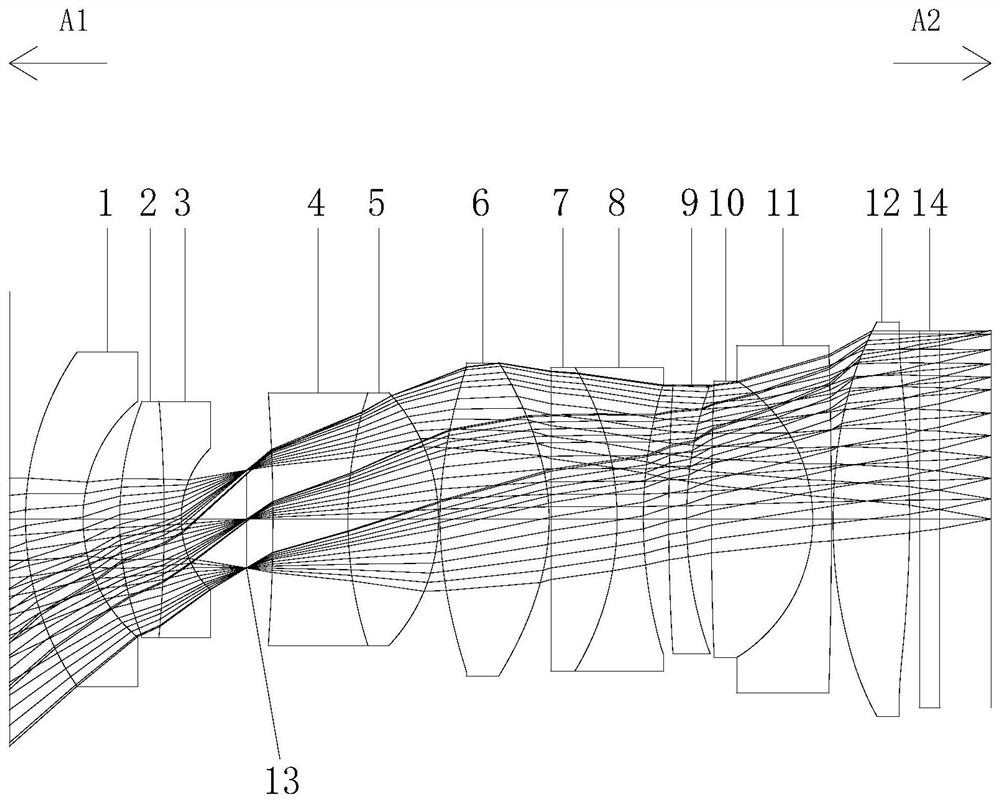
图1为实施例一的光路图;
图2为实施例一中镜头在可见光下的MTF曲线图;
图3为实施例一中镜头在可见光下的离焦曲线图;
图4为实施例一中镜头在可见光下的横向像差图;
图5为实施例一中镜头在可见光下的场曲及畸变图;
图6为实施例一的点列图;
图7为实施例二的光路图;
图8为实施例二中镜头在可见光下的MTF曲线图;
图9为实施例二中镜头在可见光下的离焦曲线图;
图10为实施例二中镜头在可见光下的横向像差图;
图11为实施例二中镜头在可见光下的场曲及畸变图;
图12为实施例二的点列图;
图13为实施例三的光路图;
图14为实施例三中镜头在可见光下的MTF曲线图;
图15为实施例三中镜头在可见光下的离焦曲线图;
图16为实施例三中镜头在可见光下的横向像差图;
图17为实施例三中镜头在可见光下的场曲及畸变图;
图18为实施例三的点列图;
图19为实施例四的光路图;
图20为实施例四中镜头在可见光下的MTF曲线图;
图21为实施例四中镜头在可见光下的离焦曲线图;
图22为实施例四中镜头在可见光下的横向像差图;
图23为实施例四中镜头在可见光下的场曲及畸变图;
图24为实施例四的点列图;
图25为实施例五的光路图;
图26为实施例五中镜头在可见光下的MTF曲线图;
图27为实施例五中镜头在可见光下的离焦曲线图;
图28为实施例五中镜头在可见光下的横向像差图;
图29为实施例五中镜头在可见光下的场曲及畸变图;
图30为实施例五的点列图。
附图标记说明:
第一透镜1、第二透镜2、第三透镜3、第四透镜4、第五透镜5、第六透镜6、第七透镜7、第八透镜8、第九透镜9、第十透镜10、第十一透镜11、第十二透镜12、光阑13、保护玻璃14。
具体实施方式
为进一步说明各实施例,本发明提供有附图。这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点。图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
现结合附图和具体实施方式对本发明进一步说明。
在本说明书中所说的「透镜具有正屈光率(或负屈光率)」,是指该透镜以高斯光学理论计算出来的近轴屈光率为正(或为负)。所说的「透镜的物侧面(或像侧面)」定义为成像光线通过透镜表面的特定范围。透镜的面形凹凸判断可依该领域中通常知识者的判断方式,即通过曲率半径(简写为R值)的正负号来判断透镜面形的凹凸。R值可常见被使用于光学设计软件中,例如Zemax或CodeV。R值亦常见于光学设计软件的透镜资料表(lensdatasheet)中。以物侧面来说,当R值为正时,判定为物侧面为凸面;当R值为负时,判定物侧面为凹面。反之,以像侧面来说,当R值为正时,判定像侧面为凹面;当R值为负时,判定像侧面为凸面。
本发明公开了一种用于无人机探测的成像镜头,从物侧至像侧沿一光轴依次包括第一透镜至第十二透镜;所述第一透镜至第十二透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;
第一透镜具负屈光率,第一透镜的物侧面为凸面、像侧面为凹面;
第二透镜具正屈光率,第二透镜的物侧面为凸面、像侧面为凸面;
第三透镜具负屈光率,第三透镜的物侧面为凹面、像侧面为凹面;
第四透镜具负屈光率,第四透镜的物侧面为凹面、像侧面为凹面;
第五透镜具正屈光率,第五透镜的物侧面为凸面、像侧面为凸面;
第六透镜具正屈光率,第六透镜的物侧面为凸面、像侧面为凸面;
第七透镜具正屈光率,第七透镜的物侧面为平面、像侧面为凸面;
第八透镜具负屈光率,第八透镜的物侧面为凹面、像侧面为凹面;
第九透镜具负屈光率,第九透镜的物侧面为凸面、像侧面为凹面;
第十透镜具正屈光率,第十透镜的物侧面为凸面、像侧面为凸面;
第十一透镜具负屈光率,第十一透镜的物侧面为凹面、像侧面为凸面;
第十二透镜具正屈光率,第十二透镜的物侧面为凸面、像侧面为凸面;
该光学成像镜头具有屈光率的透镜只有上述十二片。
优选地,第一透镜至第九透镜的焦距满足以下条件:
-27<f1<-26, 15<f2<17, -13<f3<-12, -24<f4<-22,
12<f5<14, 16<f6<18, 17<f7<19, -13<f8<-11,
-48<f9<-37, 14<f10<16, -13<f11<-11, 25<f12<27,
其中f1、f2、f3、f4、f5、f6、f7、f8、f9、f10、f11、f12分别为第一透镜至第十二透镜的焦距值。
优选地,第一透镜至第十二透镜的焦距与镜头焦距的比值的绝对值分别满足以下条件:
1.85<|f1/f|<1.95, 1.15<|f2/f|<1.25,
0.85<|f3/f|<0.95, 1.6<|f4/f|<1.75,
0.9<|f5/f|<1.0, 1.25<|f6/f|<1.35,
1.25<|f7/f|<1.35, 0.85<|f8/f|<0.95,
2.6<|f9/f|<3.5, 1.0<|f10/f|<1.2,
0.8<|f11/f|<1.0, 1.85<|f12/f|<1.95。
优选地,第二透镜的像侧面与第三透镜的物侧面相互胶合,第四透镜的像侧面与第五透镜的物侧面相互胶合,第七透镜的像侧面与第八透镜的物侧面相互胶合,第十透镜的像侧面与第十一透镜的物侧面相互胶合。
优选地,第二透镜与第三透镜之间、第四透镜与第五透镜之间、第七透镜与第八透镜之间、第十透镜与第十一透镜之间组成的胶合镜片中,两镜片之间的色散系数均相差30以上,可以很好的矫正色差,并且杜绝了镜头成像易出现的蓝紫边现象。
优选地,第六透镜和第十二透镜均采用玻璃非球面镜片,其余透镜均采用玻璃球面透镜。
优选地,第三透镜、第五透镜、第六透镜、第十透镜均采用折射率温度系数dn/dt为负值的异常材料,当外界温度变化时,镜片外径与镜片压圈表面、镜筒接触面发生之间的距离发生相对变化,采用该种材料能够很好的抵消这种相对变化对镜头后焦的影响,使镜头保持能够与Holder补偿温漂,可以保证镜头在0℃至70℃温度区间内使用时,画面清晰不失焦,能满足绝大部分的使用环境要求。
优选地,第八透镜和第九透镜像侧面的R值均大于22mm,可以很好地减弱在强光源环境下鬼像的能量,在强光源环境下成像效果更佳。
优选地,镜头还满足:TTL<60.0mm,其中,TTL为第一透镜的物侧面至成像面在光轴上的距离。
优选地,还包括光阑,光阑位于第三透镜与第四透镜之间。
下面将以具体实施例对本发明的成像镜头进行详细说明。
实施例一
参考图1所示,本实施例公开了一种用于无人机探测的成像镜头,从物侧至像侧沿一光轴依次包括第一透镜至第十二透镜;所述第一透镜至第十二透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;
第一透镜1具负屈光率,第一透镜1的物侧面为凸面、像侧面为凹面;
第二透镜2具正屈光率,第二透镜2的物侧面为凸面、像侧面为凸面;
第三透镜3具负屈光率,第三透镜3的物侧面为凹面、像侧面为凹面;
第四透镜4具负屈光率,第四透镜4的物侧面为凹面、像侧面为凹面;
第五透镜5具正屈光率,第五透镜5的物侧面为凸面、像侧面为凸面;
第六透镜6具正屈光率,第六透镜6的物侧面为凸面、像侧面为凸面;
第七透镜7具正屈光率,第七透镜7的物侧面为平面、像侧面为凸面;
第八透镜8具负屈光率,第八透镜8的物侧面为凹面、像侧面为凹面;
第九透镜9具负屈光率,第九透镜9的物侧面为凸面、像侧面为凹面;
第十透镜10具正屈光率,第十透镜10的物侧面为凸面、像侧面为凸面;
第十一透镜11具负屈光率,第十一透镜11的物侧面为凹面、像侧面为凸面;
第十二透镜12具正屈光率,第十二透镜12的物侧面为凸面、像侧面为凸面;
在本实施例中,光阑13设置在第三透镜3与第四透镜4之间,当然,在其他实施例中,光阑13也可以设置在其他合适的位置。
本具体实施例的详细光学数据如表1所示。
表1 实施例一的详细光学数据
本具体实施例中,TTL=59.6mm,镜头总长短,结构紧凑,实用性强,重量约为70g,重量轻;CRA=6°,与sensor相匹配,色彩还原度好,照度均匀;成像面大小为4/3英寸,成像面大于22mm,成像面大,成像效果好;通光F/NO.=2.8,通光大,图像边缘照度均匀,成像质量高;f1=-26.177,f2=16.340,f3=-12.332,f4=-22.842,f5=13.182,f6=17.471,f7=17.607,f8=-12.539,f9=-38.302,f10=15.437,f11=-12.015,f12=26.476。
本具体实施例中的光学成像镜头的光路图请参阅图1。可见光不同焦距的MTF曲线图请参阅图2,从图中可以看出,镜头的MTF在150mm/lp>0.3,分辨率可以达到两千万像素水平,保证了成像质量,同时大幅度提升了方案整体的静态分辨率和视频分辨率,极大的方便了后期图像优化算法的开发。可见光的离焦曲线图请参阅图3,从图中可以看出该镜头在可见光下的离焦量小。镜头在可见光下的横向色差图请参阅图4,从图中可以看出,镜头经复消色差设计,提升了图像的成像色彩还原性,对色彩的色差小,蓝紫边现象不明显。场曲/畸变请参阅图5,从图中可以看出光学畸变管控在-5%以内,像与物对应形变量小,画面清晰不变形,成像质量高,无需后期图像算法矫正畸变,应用方便。点列图请参阅图6,从图中可以看出,像差小,成像质量好。
实施例二
配合图7至图12所示,本实施例与实施例一的各个透镜的面型凹凸和屈光率大致相同,各透镜表面的曲率半径、透镜厚度等光学参数有所不同。
本具体实施例的详细光学数据如表2所示。
表2 实施例二的详细光学数据
本具体实施例中,TTL=59.6mm,镜头总长短,结构紧凑,实用性强,重量约为70g,重量轻;CRA=6°,与sensor相匹配,色彩还原度好,照度均匀;成像面大小为4/3英寸,成像面大于22mm,成像面大,成像效果好;通光F/NO.=2.8,通光大,图像边缘照度均匀,成像质量高;f1=-26.057,f2=16.983,f3=-12.506,f4=-23.023,f5=13.100,f6=17.970,f7=17.691,f8=-11.861,f9=-47.146,f10=14.818,f11=-11.663,f12=26.369。
本具体实施例中的光学成像镜头的光路图请参阅图7。可见光不同焦距的MTF曲线图请参阅图8,从图中可以看出,镜头的MTF在150mm/lp>0.3,分辨率可以达到两千万像素水平,保证了成像质量,同时大幅度提升了方案整体的静态分辨率和视频分辨率,极大的方便了后期图像优化算法的开发。可见光的离焦曲线图请参阅图9,从图中可以看出该镜头在可见光下的离焦量小。镜头在可见光下的横向色差图请参阅图10,从图中可以看出,镜头经复消色差设计,提升了图像的成像色彩还原性,对色彩的色差小,蓝紫边现象不明显。场曲/畸变请参阅图11,从图中可以看出光学畸变管控在-5%以内,像与物对应形变量小,画面清晰不变形,成像质量高,无需后期图像算法矫正畸变,应用方便。点列图请参阅图12,从图中可以看出,像差小,成像质量好。
实施例三
配合图13至图18所示,本实施例与实施例一的各个透镜的面型凹凸和屈光率大致相同,各透镜表面的曲率半径、透镜厚度等光学参数有所不同。
本具体实施例的详细光学数据如表3所示。
表3 实施例三的详细光学数据
本具体实施例中,TTL=59.6mm,镜头总长短,结构紧凑,实用性强,重量约为70g,重量轻;CRA=6°,与sensor相匹配,色彩还原度好,照度均匀;成像面大小为4/3英寸,成像面大于22mm,成像面大,成像效果好;通光F/NO.=2.8,通光大,图像边缘照度均匀,成像质量高;f1=-26.677,f2=16.726,f3=-12.404,f4=-23.368,f5=13.324,f6=17.789,f7=18.003,f8=-12.344,f9=-40.825,f10=15.212,f11=-12.602,f12=26.500。
本具体实施例中的光学成像镜头的光路图请参阅图13。可见光不同焦距的MTF曲线图请参阅图14,从图中可以看出,镜头的MTF在150mm/lp>0.3,分辨率可以达到两千万像素水平,保证了成像质量,同时大幅度提升了方案整体的静态分辨率和视频分辨率,极大的方便了后期图像优化算法的开发。可见光的离焦曲线图请参阅图15,从图中可以看出该镜头在可见光下的离焦量小。镜头在可见光下的横向色差图请参阅图16,从图中可以看出,镜头经复消色差设计,提升了图像的成像色彩还原性,对色彩的色差小,蓝紫边现象不明显。场曲/畸变请参阅图17,从图中可以看出光学畸变管控在-5%以内,像与物对应形变量小,画面清晰不变形,成像质量高,无需后期图像算法矫正畸变,应用方便。点列图请参阅图18,从图中可以看出,像差小,成像质量好。
实施例四
配合图19至图24所示,本实施例与实施例一的各个透镜的面型凹凸和屈光率大致相同,各透镜表面的曲率半径、透镜厚度等光学参数有所不同。
本具体实施例的详细光学数据如表4所示。
表4 实施例四的详细光学数据
本具体实施例中,TTL=59.6mm,镜头总长短,结构紧凑,实用性强,重量约为70g,重量轻;CRA=6°,与sensor相匹配,色彩还原度好,照度均匀;成像面大小为4/3英寸,成像面大于22mm,成像面大,成像效果好;通光F/NO.=2.8,通光大,图像边缘照度均匀,成像质量高;f1=-26.054,f2=16.979,f3=-12.495,f4=-23.033,f5=13.100,f6=17.969,f7=17.693,f8=-11.865,f9=-47.144,f10=14.821,f11=-11.661,f12=26.421。
本具体实施例中的光学成像镜头的光路图请参阅图19。可见光不同焦距的MTF曲线图请参阅图20,从图中可以看出,镜头的MTF在150mm/lp>0.3,分辨率可以达到两千万像素水平,保证了成像质量,同时大幅度提升了方案整体的静态分辨率和视频分辨率,极大的方便了后期图像优化算法的开发。可见光的离焦曲线图请参阅图21,从图中可以看出该镜头在可见光下的离焦量小。镜头在可见光下的横向色差图请参阅图22,从图中可以看出,镜头经复消色差设计,提升了图像的成像色彩还原性,对色彩的色差小,蓝紫边现象不明显。场曲/畸变请参阅图23,从图中可以看出光学畸变管控在-5%以内,像与物对应形变量小,画面清晰不变形,成像质量高,无需后期图像算法矫正畸变,应用方便。点列图请参阅图24,从图中可以看出,像差小,成像质量好。
实施例五
配合图25至图30所示,本实施例与实施例一的各个透镜的面型凹凸和屈光率大致相同,各透镜表面的曲率半径、透镜厚度等光学参数有所不同。
本具体实施例的详细光学数据如表5所示。
表5 实施例五的详细光学数据
本具体实施例中,TTL=59.6mm,镜头总长短,结构紧凑,实用性强,重量约为70g,重量轻;CRA=6°,与sensor相匹配,色彩还原度好,照度均匀;成像面大小为4/3英寸,成像面大于22mm,成像面大,成像效果好;通光F/NO.=2.8,通光大,图像边缘照度均匀,成像质量高;f1=-26.185,f2=16.339,f3=-12.332,f4=-22.855,f5=13.185,f6=17.471,f7=17.605,f8=-12.538,f9=-38.282,f10=15.437,f11=-12.021,f12=26.493。
本具体实施例中的光学成像镜头的光路图请参阅图25。可见光不同焦距的MTF曲线图请参阅图26,从图中可以看出,镜头的MTF在150mm/lp>0.3,分辨率可以达到两千万像素水平,保证了成像质量,同时大幅度提升了方案整体的静态分辨率和视频分辨率,极大的方便了后期图像优化算法的开发。可见光的离焦曲线图请参阅图27,从图中可以看出该镜头在可见光下的离焦量小。镜头在可见光下的横向色差图请参阅图28,从图中可以看出,镜头经复消色差设计,提升了图像的成像色彩还原性,对色彩的色差小,蓝紫边现象不明显。场曲/畸变请参阅图29,从图中可以看出光学畸变管控在-5%以内,像与物对应形变量小,画面清晰不变形,成像质量高,无需后期图像算法矫正畸变,应用方便。点列图请参阅图30,从图中可以看出,像差小,成像质量好。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
- 一种用于无人机探测的成像镜头
- 一种用于无人机的成像镜头