车辆的控制装置
文献发布时间:2023-06-19 10:35:20
技术领域
本发明涉及具有学习控制部的车辆的控制装置,所述学习控制部执行学习控制并且利用保护值来限制通过学习控制而求出的学习值。
背景技术
众所周知有具有如下的学习控制部的车辆的控制装置,所述学习控制部执行学习控制并且利用保护值来限制通过学习控制而求出的学习值。专利文献1记载的控制装置为其一例,对燃料泵的排出特性进行学习控制,并且利用预先设定的保护值来限制通过学习控制而得到的学习值。另外,在专利文献1中,基于初次学习值设定再学习控制用的第二保护值,并利用该第二保护值来限制再学习控制时的学习值。
在先技术文献
专利文献
专利文献1:日本特开2013-155685号公报
另外,在这样的以往的车辆的控制装置中,例如可以想到在更新使用所述学习值来执行预定的控制的控制部的控制程序时,同时也会对所述保护值进行更新。在该情况下,由于学习值通过至此为止的学习而反映各个装置的个体差异等,所以一般不会更新,在接着进行学习控制时,通过更新后的新保护值来限制学习值。即,即使在学习值从更新后的新保护值脱离的情况下,到接着进行学习控制并通过更新后的新保护值来改写学习值为止,原来的学习值会直接有效,当使用该学习值并按照新的控制程序进行控制时,有可能会损害控制性。
发明内容
本发明以以上的情形为背景而作出,其目的在于在对学习值进行限制的保护值更新后的情况下,即使在执行应用该更新后的新保护值的学习控制之前,也适当地进行使用学习值的控制。
为了达成该目的,第一发明是一种车辆的控制装置,其具有学习控制部,所述学习控制部执行学习控制并且利用保护值来限制通过该学习控制而求出的学习值,所述车辆的控制装置的特征在于,所述车辆的控制装置具有更新控制部,所述更新控制部从外部取得更新用的新保护值并更新所述保护值,并且在所述学习控制之前利用所述新保护值对所述学习值进行限制,在所述学习值从该新保护值脱离的情况下,对所述学习值进行改写,以使其成为该新保护值的范围内,另一方面,若所述学习值处于该新保护值的范围内,则将所述学习值维持不变。
在第一发明的车辆的控制装置的基础上,第二发明的特征在于,所述更新控制部从外部取得所述更新用的新保护值和与使用所述学习值执行预定的控制的学习值利用控制部的控制程序相关的更新用软件,在更新所述保护值的同时,更新所述控制程序。
在第一发明或第二发明的车辆的控制装置的基础上,第三发明的特征在于,所述更新控制部经由无线通信从外部下载包括所述更新用的新保护值在内的更新用软件并更新所述保护值。
在第一发明~第三发明中的任一车辆的控制装置的基础上,第四发明的特征在于,(a)所述车辆的控制装置具有变速控制部,所述变速控制部按照预先设定的变速控制程序,包括搭载于所述车辆的自动变速器的变速所涉及的液压式摩擦卡合装置的液压控制在内地执行所述自动变速器的变速控制,(b)所述学习控制部对与所述液压式摩擦卡合装置的液压相关的控制参数进行学习控制,以便在预先设定的目标状态下进行所述变速,并且,利用所述保护值对该控制参数的学习值进行限制,(c)所述变速控制部在所述变速控制时使用所述控制参数的学习值进行所述液压控制,(d)所述更新控制部从外部取得与所述变速控制程序及所述保护值相关的更新用软件,并同时更新该变速控制程序及该保护值。
在这样的车辆的控制装置中,在从外部取得更新用的新保护值并更新时,在学习控制之前,利用更新后的新保护值对学习值进行限制。即,在学习值从更新后的新保护值脱离的情况下,对学习值进行改写,以使其成为该新保护值的范围内,另一方面,若处于更新后的新保护值的范围内,则将学习值维持不变并反映至此为止的学习。因此,即使在刚刚进行保护值的更新之后,也能够适当地进行使用学习值的控制。
在第二发明中,与更新用的新保护值一起取得与使用学习值执行预定的控制的学习值利用控制部的控制程序相关的更新用软件,在更新保护值的同时,更新该控制程序,但可以根据需要对保护值进行更新,以便按照更新后的新的控制程序进行适当的控制。因此,通过在学习控制之前利用更新后的新保护值对学习值进行限制,即使在刚刚进行保护值的更新之后,也能够按照更新后的新的控制程序适当地进行使用学习值的控制。
在第三发明中,在经由无线通信从外部下载包括更新用的新保护值在内的更新用软件的情况下,能够简便地进行包括新保护值在内的软件的更新。
在第四发明中,在利用变速控制部对搭载于车辆的自动变速器的变速所涉及的液压式摩擦卡合装置的液压进行控制时,在对与该液压相关的控制参数进行学习控制以便在预先设定的目标状态下进行变速的情况下,在更新变速控制部的变速控制程序时,根据需要同时也对保护值进行更新,以便按照更新后的新的变速控制程序进行适当的变速控制。因此,在变速控制程序及保护值的更新时,在该时刻的学习值从新保护值的范围脱离时,当按照更新后的新变速控制程序执行变速控制时,有可能会产生变速冲击等变速异常。因此,通过应用本发明并在学习控制之前利用更新后的新保护值对学习值进行限制,即使在刚刚进行保护值的更新之后,也能够按照更新后的新变速控制程序适当地进行使用学习值的变速控制,能够防止变速冲击等变速异常。
附图说明
图1是说明具有作为本发明的一实施例的控制装置的车辆的概略结构的图,且是说明各种控制功能及控制系统的主要部分的图。
图2是与螺线管的工作状态一起说明在图1中例示的机械式有级变速部的多个挡位和使其成立的卡合装置的关系的图。
图3是能够用直线表示在图1中例示的电力式无级变速部及机械式有级变速部的多个旋转部件的转速的相对关系的共线图。
图4是说明在机械式有级变速部的变速控制中使用的变速映射及在混合动力行驶与电机行驶的切换控制中使用的动力源切换映射的一例的图。
图5是说明图1的机械式有级变速部的变速控制所涉及的液压控制回路的一例的液压回路图。
图6是说明图5的线性电磁阀SL1的具体结构的剖视图。
图7是示出线性电磁阀SL1~SL4的输出压力特性的一例的图。
图8是说明图1的机械式有级变速部的变速时的卡合侧的液压指令值的控制类型的一例的图。
图9是说明图1的机械式有级变速部从AT2速挡位向AT3速挡位升挡时的各部分的工作状态的变化的时序图的一例。
图10是说明通过由图1的变速学习部进行的离合器C2的卡合待机压力α的学习控制而得到的学习值LRN的图。
图11是说明对图10的学习值LRN进行限制的保护值Gf的图。
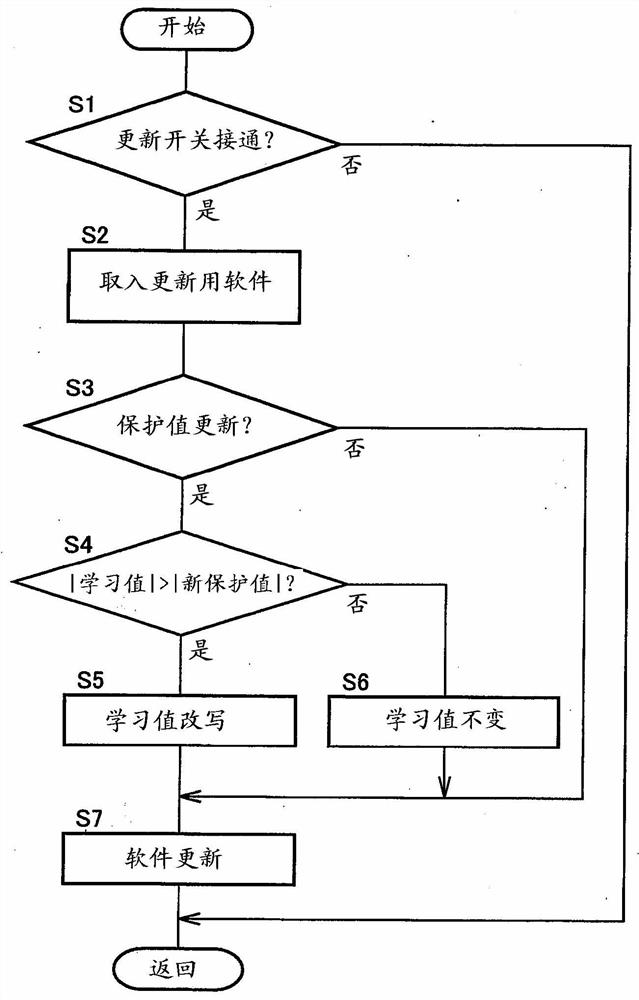
图12是具体地说明由图1的第一网关ECU执行的软件的更新处理的流程图。
图13是说明在图12的步骤S1的判断时在车辆的显示装置显示的可更新软件信息的一例的图。
图14是说明伴随着保护值的更新而在图12的步骤S5中改写学习值LRN的情况(实线)和在步骤S6中直接维持学习值的情况(虚线)的图。
附图标记说明
10:车辆 20:机械式有级变速部(自动变速器) 90:电子控制装置(车辆的控制装置) 96:AT变速控制部(变速控制部、学习值利用控制部) 100:变速学习部(学习控制部)120:第一网关ECU(更新控制部、车辆的控制装置) 124:服务器(外部) 126:第二网关ECU(更新控制部、车辆的控制装置) 130:更新工具(外部) C1、C2:离合器(液压式摩擦卡合装置) B1、B2:制动器(液压式摩擦卡合装置) α:卡合待机压力(与液压相关的控制参数)LRN:学习值 Gf:保护值 Gfa:新保护值
具体实施方式
本发明例如应用于对与自动变速器的变速所涉及的液压式摩擦卡合装置的液压相关的控制参数进行学习控制的情况,但也能够应用于与发动机等驱动力源的输出控制(怠速转速控制等)、常规制动器的制动液压控制、自动巡航控制、自动驾驶控制等相关的各种学习控制。除了基于目标状态来学习与控制相关的各种参数之外,还已知有学习车载传感器的检测值或者学习减震器等旋转构件的应力-旋转角特性等各种学习控制。与自动变速器的液压式摩擦卡合装置的液压相关的控制参数例如为待机压力、待机时间、使液压变化时的变化率等,以使输入转速的过冲、下冲成为目标范围内的方式进行学习,或以在变速时不产生束缚(tie-up)的方式进行学习,或者以使变速所需时间成为目标范围内的方式进行学习。另外,对于与该自动变速器的液压相关的学习而言,根据升挡或降挡、动力接通状态或动力断开状态等变速的种类等,已知有各种学习控制。
对于车辆而言,只要是能够通过发动机、电动马达等动力源进行行驶的车辆即可,可以是电动汽车、混合动力车辆、发动机驱动车辆等任意车辆。变速器也不是必要条件。
对于学习控制的学习值而言,例如相对于控制参数的基准值(初始值等)的校正量是适当的,但也能够将基准值本身作为学习值进行校正。对学习值进行限制的保护值能够被确定为仅限制学习值的上限、仅限制下限或限制上限及下限这两者。
由更新控制部进行的更新可以仅是保护值,但也可以将其它数据、程序包括在内地进行更新。将数据及程序包括在内地称为软件。在称为软件的情况下,既可以仅为数据,也可以仅为程序。由更新控制部进行的保护值等的更新既可以基于来自软件分发中心等外部的更新指示自动地进行,也可以得到用户等更新作业人员的确认而执行更新。在车辆的经销商(销售公司)等中,也可以在定期检查时等按照经销商的维修工厂的技术人员等的更新指示来执行更新。更新控制部例如经由OTA(Over-The-Air:无线)即移动电话网、无线LAN网等无线通信的网络从外部下载包括更新用的新保护值在内的更新用软件并进行更新处理,但也可以从以能够机械地装卸的方式与车辆连接的更新工具经由有线通信取得更新用软件并进行更新处理。更新工具为个人计算机、平板电脑或专用设备等,例如经由基于有线通信或无线通信等的下载或记录介质等而预先存储更新用的软件。
实施例
以下,参照附图,对本发明的实施例进行详细说明。
图1是说明配备于应用本发明的车辆10的动力传递装置12的概略结构的图,并且是说明用于车辆10中的各种控制的控制系统的主要部分的图。在图1中,车辆10具备发动机14、第一旋转机MG1及第二旋转机MG2。动力传递装置12具备在作为安装于车身的非旋转构件的变速器壳体16内直列配设在共用的轴心上的电力式无级变速部18及机械式有级变速部20等。电力式无级变速部18直接或经由未图示的减震器等间接地与发动机14连结。机械式有级变速部20与电力式无级变速部18的输出侧连结。另外,动力传递装置12具备与作为机械式有级变速部20的输出旋转构件的输出轴22连结的差动齿轮装置24、与差动齿轮装置24连结的一对车轴26等。在动力传递装置12中,从发动机14、第二旋转机MG2输出的动力向机械式有级变速部20传递,并从该机械式有级变速部20经由差动齿轮装置24等向车辆10所具备的驱动轮28传递。此外,在以下的说明中,将变速器壳体16称为壳体16、将电力式无级变速部18称为无级变速部18、将机械式有级变速部20称为有级变速部20。另外,对于动力而言,在不特别区别的情况下,转矩、力也为相同含义。另外,无级变速部18、有级变速部20等相对于上述共用的轴心大致对称地构成,在图1中省略该轴心的下半部分。上述共用的轴心为发动机14的曲轴、后述的连结轴34等的轴心。
发动机14是作为能够产生驱动转矩的动力源发挥功能的内燃机,例如是汽油发动机、柴油发动机等公知的内燃机。该发动机14通过利用后述的电子控制装置90对配备于车辆10的节气门致动器、燃料喷射装置、点火装置等发动机控制装置50进行控制,从而对作为发动机14的输出转矩的发动机转矩Te进行控制。在本实施例中,发动机14不经由变矩器、液力偶合器等流体式传动装置地与无级变速部18连结。
第一旋转机MG1及第二旋转机MG2是具有作为电动机(电机)的功能及作为发电机(generator)的功能的旋转电机,是所谓的电动发电机。第一旋转机MG1及第二旋转机MG2分别经由配备于车辆10的逆变器52与作为配备于车辆10的蓄电装置的电池54连接,通过利用后述的电子控制装置90对逆变器52进行控制,从而对作为第一旋转机MG1及第二旋转机MG2各自的输出转矩的MG1转矩Tg及MG2转矩Tm进行控制。旋转机MG1、MG2的输出转矩在成为加速侧的正向转矩的情况下为动力运行转矩,在成为减速侧的负向转矩的情况下为再生转矩。电池54是相对于第一旋转机MG1及第二旋转机MG2中的每一个授受电力的蓄电装置。
无级变速部18具备第一旋转机MG1和差动机构32,所述差动机构32是将发动机14的动力机械地分配到第一旋转机MG1及作为无级变速部18的输出旋转构件的中间传递构件30的动力分配机构。第二旋转机MG2能够传递动力地与中间传递构件30连结。无级变速部18是通过控制第一旋转机MG1的运转状态而控制差动机构32的差动状态的电力式无级变速器。第一旋转机MG1是能够控制作为发动机14的转速的发动机转速Ne的旋转机,相当于差动用旋转机。第二旋转机MG2是作为能够产生驱动转矩的动力源发挥功能的旋转机,相当于行驶驱动用旋转机。车辆10是具备发动机14及第二旋转机MG2作为行驶用的动力源的混合动力车辆。动力传递装置12向驱动轮28传递动力源的动力。
差动机构32由单小齿轮型的行星齿轮装置构成,具备太阳轮S0、行星轮架CA0及齿圈R0。发动机14经由连结轴34能够传递动力地与行星轮架CA0连结,第一旋转机MG1能够传递动力地与太阳轮S0连结,中间传递构件30及第二旋转机MG2能够传递动力地与齿圈R0连结。在差动机构32中,行星轮架CA0作为输入部件发挥功能,太阳轮S0作为反作用力部件发挥功能,齿圈R0作为输出部件发挥功能。
有级变速部20是作为构成中间传递构件30与驱动轮28之间的动力传递路径的一部分的有级变速器的机械式变速机构、即构成无级变速部18与驱动轮28之间的动力传递路径的一部分的机械式变速机构。中间传递构件30也作为有级变速部20的输入旋转构件发挥功能。由于第二旋转机MG2以一体旋转的方式与中间传递构件30连结,另外,发动机14与无级变速部18的输入侧连结,因此,有级变速部20是构成动力源(第二旋转机MG2或发动机14)与驱动轮28之间的动力传递路径的一部分的变速器。中间传递构件30是用于向驱动轮28传递动力源的动力的传递构件。有级变速部20例如是包括第一行星齿轮装置36及第二行星齿轮装置38这多组行星齿轮装置和单向离合器F1并具备离合器C1、离合器C2、制动器B1、制动器B2这多个卡合装置的公知的行星齿轮式的自动变速器。以下,在不特别区别的情况下,将离合器C1、离合器C2、制动器B1及制动器B2简称为卡合装置CB。
卡合装置CB是由利用液压致动器按压的多板式或单板式的离合器或制动器、利用液压致动器拉紧的带式制动器等构成的液压式的摩擦卡合装置。卡合装置CB通过利用作为分别从配备于车辆10的液压控制回路56内的线性电磁阀SL1-SL4等输出的调压后的卡合装置CB的各卡合压力的各卡合液压Pcb使作为各自的转矩容量的卡合转矩Tcb变化,从而分别对作为卡合、释放等状态的工作状态进行切换。
在有级变速部20中,第一行星齿轮装置36及第二行星齿轮装置38这多个旋转部件直接或经由卡合装置CB、单向离合器F1间接地相互连结,并且与中间传递构件30、壳体16或输出轴22连结。第一行星齿轮装置36能够相对旋转地具备太阳轮S1、行星轮架CA1及齿圈R1这三个旋转部件,第二行星齿轮装置38能够相对旋转地具备太阳轮S2、行星轮架CA2及齿圈R2这三个旋转部件。
有级变速部20是通过多个卡合装置CB中的任一预定的卡合装置的卡合而形成变速比γat(=AT输入转速Ni/输出转速No)不同的多个挡位的有级变速器。即,有级变速部20通过变更多个卡合装置CB的卡合释放状态,从而对挡位进行切换,即执行变速。有级变速部20是可形成多个挡位的有级式的自动变速器。在本实施例中,将由有级变速部20形成的挡位称为AT挡位。AT输入转速Ni是有级变速部20的输入旋转构件的转速,与中间传递构件30的转速数值相同,另外,与作为第二旋转机MG2的转速的MG2转速Nm数值相同。AT输入转速Ni能够用MG2转速Nm来表示。输出转速No是作为有级变速部20的输出旋转构件的输出轴22的转速,也是作为将无级变速部18与有级变速部20合在一起的整体的变速器的复合变速器40的输出转速。复合变速器40是构成发动机14与驱动轮28之间的动力传递路径的一部分的变速器。
例如如图2的卡合工作表所示,作为多个AT挡位,有级变速部20形成有AT1速挡位(图中的“1st”)-AT4速挡位(图中的“4th”)这四挡前进用的AT挡位。AT1速挡位“1st”的变速比γat最大,随着朝向高位侧即AT4速挡位“4th”侧,变速比γat变小。图2的卡合工作表汇总了各AT挡位与多个卡合装置CB的各工作状态的关系。即,图2的卡合工作表汇总了各AT挡位与在各AT挡位中分别卡合的卡合装置即预定的卡合装置的关系。在图2中,卡合装置这一栏的“○”表示卡合,“△”表示发动机制动时、有级变速部20的滑行降挡时的卡合,空栏表示释放。
有级变速部20利用后述的电子控制装置90对根据驾驶员(driver)的加速操作、车速V等而形成的AT挡位进行切换,即选择性地形成预定的AT挡位。在有级变速部20的变速控制中,执行通过卡合装置CB中的任意两个的切换、即卡合装置CB中的任一个的卡合及卡合装置CB中的其它任一个的释放而执行变速的所谓的离合器到离合器变速。在本实施例中,例如将从AT2速挡位“2nd”向AT1速挡位“1st”的降挡表示为2→1降挡。其它升挡、降挡也同样如此。
图3是能够用直线表示无级变速部18及有级变速部20的多个旋转部件的转速的相对关系的共线图。在图3中,对于与构成无级变速部18的差动机构32的三个旋转部件对应的三根纵线Y1、Y2、Y3而言,从左侧起依次为表示与第二旋转部件RE2对应的太阳轮S0的转速的g轴、表示与第一旋转部件RE1对应的行星轮架CA0的转速的e轴、表示与第三旋转部件RE3对应的齿圈R0的转速(即有级变速部20的输入转速)的m轴。另外,对于有级变速部20的四根纵线Y4、Y5、Y6、Y7而言,从左起依次为分别表示与第四旋转部件RE4对应的太阳轮S2的转速、与第五旋转部件RE5对应的相互连结的齿圈R1及行星轮架CA2的转速(即输出轴22的转速)、与第六旋转部件RE6对应的相互连结的行星轮架CA1及齿圈R2的转速、与第七旋转部件RE7对应的太阳轮S1的转速的轴。纵线Y1、Y2、Y3相互的间隔根据差动机构32的齿轮比(也称为齿数比)ρ0进行确定。另外,纵线Y4、Y5、Y6、Y7相互的间隔根据第一、第二行星齿轮装置36、38的各齿轮比ρ1、ρ2进行确定。由于差动机构32及行星齿轮装置36、38均为单小齿轮型的行星齿轮装置,因此,在共线图的纵轴间的关系中,在将太阳轮与行星轮架的间隔设为“1”时,行星轮架与齿圈的间隔为各行星齿轮装置的齿轮比ρ(=太阳轮的齿数Zs/齿圈的齿数Zr)。
若使用图3的共线图进行表达,则在无级变速部18的差动机构32中,构成为:在第一旋转部件RE1连结有发动机14(参照图中的“ENG”),在第二旋转部件RE2连结有第一旋转机MG1(参照图中的“MG1”),在与中间传递构件30一体旋转的第三旋转部件RE3连结有第二旋转机MG2(参照图中的“MG2”),经由中间传递构件30向有级变速部20传递发动机14的旋转。在无级变速部18中,利用横穿纵线Y2的各直线L0、L0R示出太阳轮S0的转速与齿圈R0的转速的关系。
另外,在有级变速部20中,第四旋转部件RE4经由离合器C1选择性地与中间传递构件30连结,第五旋转部件RE5与输出轴22连结,第六旋转部件RE6经由离合器C2选择性地与中间传递构件30连结,并且经由制动器B2选择性地与壳体16连结,第七旋转部件RE7经由制动器B1选择性地与壳体16连结。在有级变速部20中,利用根据卡合装置CB的卡合释放控制而横穿纵线Y5的各直线L1、L2、L3、L4,示出AT1速挡位“1st”、AT2速挡位“2nd”、AT3速挡位“3rd”、AT4速挡位“4th”中的各自的输出轴22的转速。
图3中的用实线示出的直线L0及直线L1、L2、L3、L4示出能够进行至少将发动机14作为动力源并行驶的混合动力行驶的混合动力行驶模式下的前进行驶中的各旋转部件的相对转速。在该混合动力行驶模式下,在差动机构32中,相对于向行星轮架CA0输入的发动机转矩Te,在由第一旋转机MG1产生的负向转矩即反作用转矩以正向旋转向太阳轮S0输入时,在齿圈R0会呈现以正向旋转成为正向转矩的发动机直接传递转矩Td(=Te/(1+ρ0)=-(1/ρ0)×Tg)。并且,根据要求驱动力,发动机直接传递转矩Td与MG2转矩Tm的合计转矩作为车辆10的前进方向上的驱动转矩而经由形成了AT1速挡位“1st”-AT4速挡位“4th”中的任一AT挡位的有级变速部20向驱动轮28传递。此时,第一旋转机MG1作为以正向旋转产生负向转矩的发电机发挥功能。第一旋转机MG1的发电电力Wg对电池54充电或由第二旋转机MG2消耗。第二旋转机MG2使用发电电力Wg的全部或一部分或者除了发电电力Wg之外还使用来自电池54的电力而输出MG2转矩Tm。
虽然在图3中未进行图示,但在能够进行使发动机14停止并且将第二旋转机MG2作为动力源并行驶的电机行驶的电机行驶模式下的共线图中,在差动机构32中,将行星轮架CA0设为零旋转,向齿圈R0输入以正向旋转成为正向转矩的MG2转矩Tm。此时,与太阳轮S0连结的第一旋转机MG1被设为无负荷状态,并以负向旋转进行空转。即,在电机行驶模式下,不对发动机14进行驱动,将发动机转速Ne设为零,MG2转矩Tm作为车辆10的前进方向上的驱动转矩而经由形成了AT1速挡位“1st”-AT4速挡位“4th”中的任一AT挡位的有级变速部20向驱动轮28传递。在此的MG2转矩Tm为正向旋转的动力运行转矩。
图3中的用虚线示出的直线L0R及直线LR示出电机行驶模式下的后退行驶中的各旋转部件的相对转速。在该电机行驶模式下的后退行驶中,向齿圈R0输入以负向旋转成为负向转矩的MG2转矩Tm,该MG2转矩Tm作为车辆10的后退方向上的驱动转矩而经由形成了AT1速挡位“1st”的有级变速部20向驱动轮28传递。在车辆10中,通过利用后述的电子控制装置90在形成了作为多个AT挡位中的前进用的低位侧的AT挡位的例如AT1速挡位“1st”的状态下从第二旋转机MG2输出与前进行驶时的前进用的MG2转矩Tm正负相反的后退用的MG2转矩Tm,从而能够进行后退行驶。在此,前进用的MG2转矩Tm为成为正向旋转的正向转矩的动力运行转矩,后退用的MG2转矩Tm为成为负向旋转的负向转矩的动力运行转矩。纵线Y5与直线LR的交点“Rev”为该后退行驶时的输出轴22的转速。像这样,在车辆10中,通过使用前进用的AT挡位并使MG2转矩Tm的正负反转,从而进行后退行驶。此外,在混合动力行驶模式下,例如通过以将发动机转速Ne维持为怠速转速等的方式将第一旋转机MG1设为无负荷,并将第二旋转机MG2设为负向旋转,从而也能够与电机行驶模式同样地进行后退行驶。
在动力传递装置12中,构成作为如下的电力式变速机构的无级变速部18,所述电力式变速机构具备差动机构32,所述差动机构32具有作为能够传递动力地连结有发动机14的第一旋转部件RE1的行星轮架CA0、作为能够传递动力地连结有第一旋转机MG1的第二旋转部件RE2的太阳轮S0及作为连结有中间传递构件30的第三旋转部件RE3的齿圈R0这三个旋转部件,通过控制第一旋转机MG1的运转状态,从而对差动机构32的差动状态进行控制。无级变速部18作为使发动机转速Ne与MG2转速Nm的比值即变速比γ0(=Ne/Nm)变化的电动无级变速器进行工作,所述发动机转速Ne与成为输入旋转构件的连结轴34的转速数值相同,所述MG2转速Nm是成为输出旋转构件的中间传递构件30的转速。
在此,在混合动力行驶模式中,相对于由于在有级变速部20形成预定的AT挡位而被驱动轮28的旋转约束的齿圈R0的转速,在通过控制第一旋转机MG1的转速而使太阳轮S0的转速上升或下降时,会使行星轮架CA0的转速即发动机转速Ne上升或下降。因此,在混合动力行驶中,能够使发动机14在效率较高的运转点工作。即,利用形成了预定的AT挡位的有级变速部20和作为无级变速器工作的无级变速部18,能够作为直列配置有无级变速部18和有级变速部20的复合变速器40整体而构成无级变速器。
另外,由于也能够使无级变速部18如有级变速器那样进行变速,因此,利用形成预定的AT挡位的有级变速部20和如有级变速器那样进行变速的无级变速部18,能够使复合变速器40整体如有级变速器那样进行变速。即,在复合变速器40中,能够对有级变速部20和无级变速部18进行协同控制,以使发动机转速Ne相对于输出转速No的比值即变速比γt(=Ne/No)不同的多个挡位成立。在本实施例中,将通过使复合变速器40整体如有级变速器那样进行变速而成立的挡位称为模拟挡位。变速比γt是由直列配置的无级变速部18及有级变速部20形成的总变速比,是将无级变速部18的变速比γ0与有级变速部20的变速比γat相乘而得到的值(γt=γ0×γat)。
模拟挡位例如被分配成通过有级变速部20的各AT挡位与一种或多种无级变速部18的变速比γ0的组合而相对于有级变速部20的各AT挡位分别使一种或多种成立。例如,预先设定为相对于AT1速挡位“1st”使模拟1速挡位-模拟3速挡位成立,相对于AT2速挡位“2nd”使模拟4速挡位-模拟6速挡位成立,相对于AT3速挡位“3rd”使模拟7速挡位-模拟9速挡位成立,相对于AT4速挡位“4th”使模拟10速挡位成立。在复合变速器40中,通过以成为相对于输出转速No实现多个变速比γt的发动机转速Ne的方式控制无级变速部18,从而能够相对于一个AT挡位使变速比γt不同的多个模拟挡位成立。另外,在复合变速器40中,通过与AT挡位的切换相匹配地控制无级变速部18,从而能够对模拟挡位进行切换。
图5是示出包括对所述有级变速部20的多个卡合装置CB进行卡合释放控制的线性电磁阀SL1~SL4在内的液压控制回路56的一例的液压回路图。液压控制回路56具备由发动机14进行旋转驱动的机械式油泵200及由电动马达进行旋转驱动的电动式油泵202作为液压源。由上述油泵200、202从油盘等油积存部204汲取的工作油经由单向阀206、208向管路压力油路210供给,并被初级调节阀等管路压力控制阀212调压为预定的管路压力PL。在管路压力控制阀212连接有线性电磁阀SLT。通过利用电子控制装置90对线性电磁阀SLT进行电控制,从而将作为大致恒定的压力的调制液压Pmo设为初始压力并输出信号压力Pslt。然后,在向管路压力控制阀212供给该信号压力Pslt时,管路压力控制阀212的阀柱由信号压力Pslt施力而沿轴向移动,并使排泄流量变化,由此,根据该信号压力Pslt对管路压力PL进行调压。例如根据作为输出要求量的加速器开度θacc等对管路压力PL进行调压。
被调压到管路压力PL的工作油直接从管路压力油路210向线性电磁阀SL1及SL4供给。另外,管路压力油路210的工作油的一部分从挡位切换阀214经由D挡油路218向线性电磁阀SL2及SL3供给。线性电磁阀SL1~SL4与离合器C1、C2、制动器B1、B2的各液压致动器(液压缸)220、222、224、226对应地设置,通过按照从电子控制装置90供给的液压控制指令信号Sat分别对输出压力Pout(卡合液压Pcb)进行控制,从而单独地对离合器C1、C2、制动器B1、B2进行卡合释放控制,并形成所述AT1速挡位“1st”~AT4速挡位“4th”中的任一前进挡位。
上述挡位切换阀214的阀柱由弹簧216沿轴向的一方(图5的上方)施力,并被保持在阻断工作油从管路压力油路210向D挡油路218的流通的断开位置(在比中心线靠左侧示出的位置)。从分别由电子控制装置90进行开闭控制的第一电磁阀SC1及第二电磁阀SC2向挡位切换阀214供给切换油,通过从第一电磁阀SC1供给切换油且使来自第二电磁阀SC2的切换油停止,从而使阀柱克服弹簧216的施力而向接通位置(在比中心线靠右侧示出的位置)移动,容许管路压力PL的工作油从管路压力油路210向D挡油路218流通。在一起供给第一电磁阀SC1及第二电磁阀SC2的切换油的情况下及在一起停止的情况下,均按照弹簧216的施力将阀柱保持在断开位置,并阻断工作油从管路压力油路210向D挡油路218的流通。第一电磁阀SC1及第二电磁阀SC2均为常闭型的阀,通过通电而输出切换油。
如图2所示,根据由变速杆等选择的挡位,对上述第一电磁阀SC1及第二电磁阀SC2进行控制。图2的SC1、SC2这一栏的“○”是指通电(切换油的输出),空栏是指非通电(切换油的停止)。如图2所示,第一电磁阀SC1与挡位的种类无关地始终被设为接通即通电,并被保持在输出切换油的状态,但第二电磁阀SC2在停车用的P挡及后退行驶用的R挡中被设为输出切换油的接通(通电),将挡位切换阀214的阀柱设为断开位置,并阻断工作油从管路压力油路210向D挡油路218的流通。由此,有级变速部20能够仅使AT1速挡位“1st”成立。另一方面,在前进行驶用的D挡中,将第二电磁阀SC2设为断开(非通电),将挡位切换阀214的阀柱设为接通位置,并容许工作油从管路压力油路210向D挡油路218的流通。由此,有级变速部20能够使AT1速挡位“1st”~AT4速挡位“4th”所有的挡位成立。此外,在阻断动力传递的N挡中,在前进行驶时将第二电磁阀SC2设为断开(非通电),在后退行驶时将第二电磁阀SC2设为接通(通电)。在本实施例中,在P挡及N挡中,将有级变速部20设为AT1速挡位“1st”,但通过将第一旋转机MG1及第二旋转机MG2的转矩均设为0,从而使动力传递的阻断状态成立。此外,在P挡及N挡中,也可以将所有的卡合装置CB释放,并将有级变速部20本身设为动力传递阻断状态。
图6是说明所述线性电磁阀SL1~SL4的结构的图。由于线性电磁阀SL1~SL4为基本相同的结构,所以在此例示线性电磁阀SL1。该线性电磁阀SL1包括作为通过通电而将电能转换为驱动力的装置的螺线管部314和利用该螺线管部314的驱动对作为输入压力的管路压力PL进行调压并产生预定的输出压力Pout(相当于卡合液压Pcb)的调压部316。螺线管部314包括圆筒状的绕组芯318、卷绕于该绕组芯318的外周侧的线圈320、能够沿轴向移动地设置于绕组芯318的内部的芯部322、固设于该芯部322中的与上述调压部316相反侧的端部的柱塞324、用于收容上述绕组芯318、线圈320、芯部322及柱塞324的壳体326以及嵌装于该壳体326的开口的盖328。上述调压部316包括嵌装于壳体326的套筒330、能够沿轴向移动地设置于该套筒330的内部的阀柱332以及朝向螺线管部314对该阀柱332施力的弹簧334,该阀柱332中的螺线管部314侧的端部与上述芯部322中的调压部316侧的端部抵接。在如以上那样构成的线性电磁阀SL1中,当在上述线圈320中对驱动电流Idr进行通电时,根据其电流值,使柱塞324沿与芯部322及阀柱332共用的轴向移动,由此,使芯部322、进而使阀柱332沿相同方向移动。由此,对从输入端口336输入的工作油的流量及从排泄端口338排出的工作油的流量进行调节,例如按照图7的示出驱动电流Idr与输出压力Pout的关系的阀特性,从该输入端口336输入的管路压力PL被调压到与驱动电流Idr对应的预定的输出压力Pout并从输出端口340输出。所述图2的螺线管这一栏的SL1~SL4中的“○”是指驱动电流Idr的通电即输出预定的输出压力Pout并使对应的卡合装置CB卡合,空栏是指非通电且停止输出压力Pout的输出并将对应的卡合装置CB释放。“△”是指发动机制动时、有级变速部20的滑行降挡时通电。
图8是与在对有级变速部20进行离合器到离合器变速时卡合的那一侧的卡合装置CB相关的液压指令值所对应的驱动电流Idr的控制类型的一例。例如,在2→3升挡的情况下,如由图2明确可知的那样,将制动器B1释放并对离合器C2进行卡合控制,为作为该卡合侧的离合器C2的液压Pc2的液压指令值。在图8的控制类型中,当在时间ta1输出变速指令时,为了对工作油进行急速填充而使驱动电流Idr急剧增大。到时间ta2为止的期间为该急速填充(快速施加)期间,在成为时间ta2时,为了将离合器C2维持在即将卡合状态,使其降低至与预先设定的卡合待机压力α对应的电流值。在以与该卡合待机压力α对应的驱动电流Idr保持预先设定的待机时间β而成为时间ta3时,为了使离合器C2逐渐卡合,以使C2液压Pc2以预先设定的变化率γ上升的方式使驱动电流Idr增大。在该C2液压Pc2的上升过程中,使AT输入转速Ni(=Nm)变化,在到达作为变速后的挡位的AT3速挡位“3rd”的同步转速时(时间ta4),使驱动电流Idr即C2液压Pc2上升至最大值,将离合器C2完全卡合。
返回到图1,车辆10具备电子控制装置90作为执行发动机14的输出控制、无级变速部18的变速控制及有级变速部20的变速控制等各种控制的控制器。图1是一起示出电子控制装置90的输入输出系统的图,另外,是说明由电子控制装置90执行的控制功能的主要部分的功能框图。电子控制装置90构成为包括具备CPU、RAM、ROM、输入输出接口等的所谓的微型计算机,通过按照存储于ROM的程序进行信号处理,从而执行车辆10的各种控制。电子控制装置90根据需要分为发动机控制用、变速控制用等而构成。
分别向电子控制装置90供给基于配备于车辆10的各种传感器等(例如发动机转速传感器60、输出转速传感器62、MG1转速传感器64、MG2转速传感器66、加速器开度传感器68、节气门开度传感器70、制动踏板传感器71、转向传感器72、驾驶员状态传感器73、G传感器74、横摆率传感器76、电池传感器78、油温传感器79、车辆周边信息传感器80、GPS(全球定位系统)天线81、外部网络通信用天线82、导航系统83、驾驶辅助设定开关组84、挡位传感器85等)的检测值的各种信号等(例如发动机转速Ne、与车速V对应的输出转速No、第一旋转机MG1的转速即MG1转速Ng、AT输入转速Ni即MG2转速Nm、示出驾驶员的加速要求的大小的加速器踏板的踩踏操作量即加速器开度θacc、电子节气门的开度即节气门开度θth、示出用于使车轮制动器(常规制动器)工作的制动踏板正在由驾驶员操作的状态的信号即制动接通信号Bon、与制动踏板的踩踏力对应的表示由驾驶员进行的对制动踏板的踩踏操作力的大小的制动操作量Bra、配备于车辆10的方向盘的转向角θsw及转向方向Dsw、示出方向盘由驾驶员握住的状态的信号即转向接通信号SWon、示出驾驶员的状态的信号即驾驶员状态信号Drv、车辆10的前后加速度Gx、车辆10的左右加速度Gy、车辆10的绕铅垂轴的旋转角速度即横摆率Ryaw、电池54的电池温度THbat、电池充放电电流Ibat、电池电压Vbat、向卡合装置CB的液压致动器供给的工作油即使卡合装置CB工作的工作油的温度即工作油温THoil、由相机、距离传感器等检测出的车辆周边信息Iard、GPS信号Sgps、通信信号Scom、导航信息Inavi、示出自动驾驶控制、自动巡航控制等驾驶辅助控制中的由驾驶员进行的设定的信号即驾驶辅助设定信号Sset、配备于车辆10的变速杆的操作位置POSsh等)。
驾驶员状态传感器73例如包括拍摄驾驶员的表情、瞳孔等的相机、检测驾驶员的生物信息的生物信息传感器等中的至少一个,取得驾驶员的视线、面部的朝向、眼球、面部的活动、心率的状态等驾驶员的状态。
车辆周边信息传感器80例如包括激光雷达、雷达及车载相机等中的至少一个,直接取得与行驶期间的道路相关的信息、与存在于车辆周边的物体相关的信息。激光雷达例如是分别检测车辆10前方的物体、侧方的物体、后方的物体等的多个激光雷达或检测车辆10整个周围的物体的一个激光雷达,并将与检测到的物体相关的物体信息作为车辆周边信息Iard输出。雷达例如是分别检测车辆10前方的物体、前方附近的物体、后方附近的物体等的多个雷达等,并将与检测到的物体相关的物体信息作为车辆周边信息Iard输出。由所述激光雷达、雷达得到的物体信息包括检测到的物体距车辆10的距离和方向。车载相机例如是设置于车辆10的前玻璃的里侧并对车辆10的前方进行拍摄的单眼相机或立体摄影机,并将拍摄信息作为车辆周边信息Iard输出。该拍摄信息包括行驶道路的车道、行驶道路上的标志及行驶道路上的其它车辆、步行者、障碍物等信息。
驾驶辅助设定开关组84包括用于执行自动驾驶控制的自动驾驶选择开关、用于执行自动巡航控制的巡航开关、设定自动巡航控制中的车速的开关、设定巡航控制中的与前行车辆的车间距离的开关、用于执行维持设定的车道并行驶的车道保持控制的开关等。
通信信号Scom例如包括在与服务器、道路交通信息通信系统等作为车外装置的中心之间收发的道路交通信息等及/或不经由所述中心地在与位于车辆10附近的其它车辆之间直接收发的车与车之间的通信信息等。道路交通信息例如包括道路的拥堵、事故、施工、所需时间、停车场等信息。车与车之间的通信信息例如包括车辆信息、行驶信息、交通环境信息等。车辆信息例如包括乘用车、卡车、二轮车等表示车辆种类的信息。行驶信息例如包括车速V、位置信息、制动踏板的操作信息、转向信号灯的闪烁信息、危险灯的闪烁信息等信息。交通环境信息例如包括道路的拥堵、施工等信息。
导航信息Inavi例如包括基于预先存储于导航系统83的地图数据的道路信息、设施信息等地图信息等。道路信息包括市区道路、郊区道路、山区道路、高速汽车道路即高速公路等道路的种类、道路的分支、合并、道路的坡度、限制车速等信息。设施信息包括超市、商店、饭店、停车场、公园、修理车辆10的据点、住宅、高速公路上的服务区等据点的种类、所在位置、名称等信息。服务区例如是在高速公路具有停车、饮食、加油等设备的据点。
导航系统83基于GPS信号Sgps在预先存储的地图数据上特定本车辆的位置。导航系统83在显示于显示装置89的地图上显示本车辆的位置。在输入目的地时,导航系统83对从出发地起到目的地为止的行驶路径进行运算,并通过显示装置89、扬声器等对驾驶员进行行驶路径等的指示。显示装置89例如是能够进行触摸操作的多用途显示器等,能够在导航系统83以外的各种用途中使用,也能够对与车辆10的检查相关的维护信息等进行显示。另外,显示装置89不仅能够进行图像显示,也能够产生语音、音乐等声音。
挡位传感器85检测变速杆的操作位置(挡位)。变速杆选择前进行驶用的D挡、后退行驶用的R挡、停车用的P挡及将动力传递阻断的N挡,被操作到选择D挡的D位置、选择R挡的R位置、选择P挡的P位置、选择N挡的N位置中的任一个。动力传递装置12根据选择挡位对动力传递状态进行切换,在D挡的情况下,将车辆10设为能够进行前进行驶,在R挡的情况下,将车辆10设为能够进行后退行驶,在P挡及N挡的情况下,设为无法进行动力传递。
分别从电子控制装置90向配备于车辆10的各装置(例如发动机控制装置50、逆变器52、液压控制回路56、外部网络通信用天线82、车轮制动装置86、转向装置87、信息通知装置88等)输出各种指令信号(例如用于控制发动机14的发动机控制指令信号Se、用于分别控制第一旋转机MG1及第二旋转机MG2的旋转机控制指令信号Smg、用于控制卡合装置CB的工作状态的液压控制指令信号Sat、通信信号Scom、用于控制由车轮制动器产生的制动转矩的制动控制指令信号Sbra、用于控制车轮(特别是前轮)的转向的转向控制指令信号Sste、用于对驾驶员进行警告、通知的信息通知控制指令信号Sinf等)。
车轮制动装置86是对车轮赋予由车轮制动器产生的制动转矩的制动装置。车轮制动装置86根据由驾驶员进行的例如对制动踏板的踩踏操作等,向设置于车轮制动器的车轮缸供给制动液压。在该车轮制动装置86中,通常,从制动器主缸产生的与制动踏板的踩踏力对应的大小的主缸液压作为制动液压直接向车轮缸供给。另一方面,在车轮制动装置86中,例如在ABS控制时、横向滑动抑制控制时、车速控制时、自动驾驶控制时等,为了产生由车轮制动器产生的制动转矩,向车轮缸供给在各控制中所需的制动液压。上述车轮为驱动轮28及未图示的从动轮。
转向装置87例如对车辆10的转向系统赋予与车速V、转向角θsw及转向方向Dsw、横摆率Ryaw等相应的辅助转矩。在转向装置87中,例如在自动驾驶控制时等,对车辆10的转向系统赋予控制前轮的转向的转矩。
信息通知装置88例如是在与车辆10的行驶相关的某些部件产生故障或该部件的功能降低的情况下对驾驶员进行警告、通知的装置。信息通知装置88例如是监视器、显示器、警报灯等显示装置及/或扬声器、蜂鸣器等声音输出装置等。作为显示装置,也能够利用所述显示装置89。声音输出装置是对驾驶员进行听觉上的警告、通知的装置。
为了实现车辆10中的各种控制,电子控制装置90具备驾驶控制部件即驾驶控制部94、AT变速控制部件即AT变速控制部96及混合动力控制部件即混合动力控制部98。
作为车辆10的驾驶控制,驾驶控制部94能够进行基于驾驶员的驾驶操作进行行驶的自主驾驶控制和通过与驾驶员的驾驶操作无关地自动地进行车辆10的驾驶控制而进行行驶的自动驾驶控制,在自动驾驶控制中,例如基于由驾驶员输入的目的地、地图信息等自动地设定目标行驶状态,通过基于该目标行驶状态自动地进行加减速和转向,从而进行行驶。自主驾驶控制是通过基于驾驶员的驾驶操作的自主驾驶而进行行驶的驾驶控制,且是通过基于驾驶员的驾驶操作的手动驾驶而进行行驶的手动驾驶控制。该自主驾驶是通过加速操作、制动操作、转向操作等驾驶员的驾驶操作而进行车辆10的通常行驶的驾驶方法。自动驾驶控制是通过自动驾驶进行行驶的驾驶控制。该自动驾驶是与驾驶员的驾驶操作(意图)无关地通过利用基于来自各种传感器的信号、信息等的电子控制装置90的控制自动地进行加减速、制动、转向等而进行车辆10的行驶的驾驶方法。
当在驾驶辅助设定开关组84的自动驾驶选择开关中未选择自动驾驶的情况下,驾驶控制部94使自主驾驶模式成立并执行自主驾驶控制。驾驶控制部94通过向AT变速控制部96及混合动力控制部98输出分别控制有级变速部20、发动机14、旋转机MG1、MG2的指令,从而执行自主驾驶控制。
在由驾驶员对驾驶辅助设定开关组84中的自动驾驶选择开关进行操作并选择了自动驾驶的情况下,驾驶控制部94使自动驾驶模式成立并执行自动驾驶控制。具体而言,驾驶控制部94基于由驾驶员输入的目的地、燃料消耗优先度、车速、车间距离等各种设定、基于GPS信号Sgps的本车辆的位置信息、基于导航信息Inavi及/或通信信号Scom的弯道等道路状态、坡度、高度、法定速度等所述地图信息、基础设施信息及天气等以及基于车辆周边信息Iard的行驶道路的车道、行驶道路上的标志、行驶道路上的其它车辆、步行者等信息,自动地设定目标行驶状态。驾驶控制部94通过基于设定的目标行驶状态自动地进行加减速、制动及转向,从而进行自动驾驶控制。该加减速是车辆10的加速和车辆10的减速,在此的减速也可以包括制动。
作为所述目标行驶状态,驾驶控制部94设定目标路线及目标前进路径、考虑了基于实际的车间距离等的安全余量的目标车速、基于目标车速、行驶阻力量等的目标驱动转矩或目标加减速度等。上述行驶阻力例如能够使用由驾驶员预先对车辆10设定的值、基于通过与车外的通信而取得的地图信息、车辆规格的值或者在行驶期间基于坡度、实际驱动量、实际前后加速度Gx等而运算出的推定值等。驾驶控制部94向AT变速控制部96及混合动力控制部98输出分别对有级变速部20、发动机14、旋转机MG1、MG2进行控制的指令,以便得到目标驱动转矩。在目标驱动转矩为负值的情况下,即在需要制动转矩的情况下,使由发动机14产生的发动机制动转矩、由第二旋转机MG2产生的再生制动转矩及由车轮制动装置86产生的车轮制动转矩中的至少一个制动转矩作用于车辆10。例如,驾驶控制部94在能够利用的范围对车轮制动转矩进行运算,并向车轮制动装置86输出用于使该车轮制动转矩作用的制动控制指令信号Sbra,以便得到目标驱动转矩。除此之外,驾驶控制部94向转向装置87输出用于基于设定的目标行驶状态来控制前轮的转向的转向控制指令信号Sste。
AT变速控制部96将作为自动变速器的有级变速部20的变速所涉及的卡合装置CB的液压控制包括在内地按照预先设定的变速控制程序执行有级变速部20的变速控制。具体而言,使用作为预先实验性或设计性地求出并存储的关系即预先设定的关系的图4例示的AT挡位变速映射等,进行有级变速部20的变速判断,并根据需要执行有级变速部20的变速控制。AT变速控制部96向液压控制回路56输出用于利用电磁阀SL1-SL4切换卡合装置CB的卡合释放状态的液压控制指令信号Sat,以便自动地切换有级变速部20的AT挡位。上述AT挡位变速映射例如是在以车速V及要求驱动力Frdem为变量的二维坐标上具有用于判断有级变速部20的变速的变速线的预定的关系。在此,代替车速V,也可以使用输出转速No等,另外,代替要求驱动力Frdem,也可以使用要求驱动转矩Trdem、加速器开度θacc、节气门开度θth等。上述AT挡位变速映射中的各变速线是实线所示的那样的用于判断升挡的升挡线及虚线所示的那样的用于判断降挡的降挡线。在自动驾驶控制的情况下,作为上述要求驱动力Frdem、要求驱动转矩Trdem,例如应用目标驱动力、目标驱动转矩即可。
图9是示出由上述AT变速控制部96执行的有级变速部20的变速时的各部分的工作状态的变化的时序图的一例。具体而言,是将制动器B1释放并且对离合器C2进行卡合控制的2→3升挡时的时序图。在图9中,时间t1是按照变速指令开始变速控制的时间,C2液压指令值(具体而言为线性电磁阀SL2的驱动电流Idr)按照所述图8所示的那样的预先设定的控制类型进行变化,并且,B1液压指令值(具体而言为线性电磁阀SL3的驱动电流Idr)按照预先设定的控制类型进行变化。时间t2是伴随着制动器B1及离合器C2的卡合转矩的变化而作为AT输入转速Ni的MG2转速Nm开始降低的惯性阶段的开始时间,时间t3是MG2转速Nm降低至作为变速目标的AT3速挡位“3rd”的同步转速的惯性阶段的结束时间即变速结束时间。
混合动力控制部98包括作为控制发动机14的工作的发动机控制部件即发动机控制部的功能和作为经由逆变器52控制第一旋转机MG1及第二旋转机MG2的工作的旋转机控制部件即旋转机控制部的功能,利用上述控制功能来执行发动机14、第一旋转机MG1及第二旋转机MG2的混合动力驱动控制等。混合动力控制部98通过将加速器开度θacc及车速V应用于作为预先设定的关系的例如驱动要求量映射,从而算出作为驱动要求量的驱动轮28的要求驱动力Frdem[N]。作为驱动要求量,除了要求驱动力Frdem之外,还能够使用驱动轮28中的要求驱动转矩Trdem[Nm]、驱动轮28中的要求驱动功率Prdem[W]、输出轴22中的要求AT输出转矩等。在自动驾驶控制的情况下,作为上述要求驱动力Frdem、要求驱动转矩Trdem,例如应用目标驱动力、目标驱动转矩即可。
混合动力控制部98输出作为控制发动机14的指令信号的发动机控制指令信号Se和作为控制第一旋转机MG1及第二旋转机MG2的指令信号的旋转机控制指令信号Smg,以实现要求驱动功率Prdem。发动机控制指令信号Se例如是输出此时的发动机转速Ne下的发动机转矩Te的发动机14的功率即发动机功率Pe的指令值。旋转机控制指令信号Smg例如是输出作为发动机转矩Te的反作用转矩的、指令输出时的MG1转速Ng下的MG1转矩Tg的第一旋转机MG1的发电电力Wg的指令值,且是输出指令输出时的MG2转速Nm下的MG2转矩Tm的第二旋转机MG2的消耗电力Wm的指令值。
例如在使无级变速部18作为无级变速器工作并使复合变速器40整体作为无级变速器工作的情况下,考虑到发动机最佳燃料消耗点等,混合动力控制部98对发动机14进行控制并且对第一旋转机MG1的发电电力Wg进行控制,以便成为能够得到实现要求驱动功率Prdem的发动机功率Pe的发动机转速Ne和发动机转矩Te,由此,执行无级变速部18的无级变速控制,并使无级变速部18的变速比γ0变化。作为该控制的结果,对作为无级变速器工作的情况下的复合变速器40的变速比γt进行控制。
例如在使无级变速部18如有级变速器那样变速并使复合变速器40整体如有级变速器那样变速的情况下,混合动力控制部98使用作为预先设定的关系的例如模拟挡位变速映射进行复合变速器40的变速判断,与由AT变速控制部96进行的对有级变速部20的AT挡位的变速控制协同地执行无级变速部18的变速控制,以便选择性地使多个模拟挡位成立。通过以能够维持各个变速比γt的方式根据车速V而利用第一旋转机MG1对发动机转速Ne进行控制,从而能够使多个模拟挡位成立。各模拟挡位的变速比γt并不一定需要在车速V的整个区域均为恒定值,既可以在预定区域变化,也可以利用各部分的转速的上限、下限等施加限制。像这样,混合动力控制部98能够进行使发动机转速Ne如有级变速那样变化的变速控制。在使复合变速器40整体如有级变速器那样变速的模拟有级变速控制中,例如在由驾驶员选择了运动行驶模式等重视行驶性能的行驶模式的情况下、在要求驱动转矩Trdem比较大的情况下,也可以仅优先执行使复合变速器40整体作为无级变速器工作的无级变速控制,但除去预定的执行限制时以外,也可以基本上执行模拟有级变速控制。
作为行驶模式,混合动力控制部98根据行驶状态选择性地使电机行驶模式或混合动力行驶模式成立。例如,混合动力控制部98在要求驱动功率Prdem处于比预先设定的阈值小的电机行驶区域的情况下,使电机行驶模式成立,另一方面,在要求驱动功率Prdem处于成为预先设定的阈值以上的混合动力行驶区域的情况下,使混合动力行驶模式成立。图4的单点划线A是用于对将车辆10的行驶用的动力源至少设为发动机14还是仅设为第二旋转机MG2进行切换的边界线。即,图4的单点划线A是用于切换混合动力行驶和电机行驶的混合动力行驶区域与电机行驶区域的边界线。具有该图4的单点划线A所示的那样的边界线的预先设定的关系是由以车速V及要求驱动力Frdem为变量的二维坐标构成的动力源切换映射的一例。此外,在图4中,为了方便,将该动力源切换映射与AT挡位变速映射一起示出。在自动驾驶控制中,也能够使用同样的动力源切换映射切换电机行驶模式和混合动力行驶模式并进行行驶。
电子控制装置90还具备变速学习部100,所述变速学习部100在利用所述AT变速控制部96进行有级变速部20的变速控制时,对与该变速所涉及的卡合装置CB的卡合液压Pcb相关的控制参数进行学习控制。即,由于因有级变速部20的变速控制所涉及的线性电磁阀SL1~SL4、卡合装置CB的个体差异(例如特性的偏差等)、随时间的变化等而稳定地产生的卡合转矩的误差成分,在变速时会产生升速、束缚等或者使得变速所需时间变长,有时会产生变速冲击等变速异常。为了校正该误差成分,对与上述卡合装置CB的卡合液压Pcb相关的控制参数进行学习控制,以便在预定的目标状态下进行变速。变速学习部100相当于学习控制部。
当利用AT变速控制部96使有级变速部20变速时,变速学习部100基于实际的控制结果进行学习控制。例如在2→3升挡的情况下,将制动器B1释放,并且对离合器C2进行卡合控制而进行变速,但在本实施例中,对与作为卡合侧的摩擦卡合装置的离合器C2的卡合液压Pc2相关的控制参数即所述卡合待机压力α(参照图8)进行学习控制。具体而言,在开始所述图9中的惯性阶段时(时间t2),对相对于卡合待机压力α的基准值(初始值)的校正量即学习值LRN进行增减,以使作为AT输入转速Ni的MG2转速Nm从变速前(AT2速挡位)的同步转速上升的升速量(参照图9的虚线)成为预先设定的目标范围内。即,在升速量较大的情况下,以使卡合待机压力α变高的方式增大学习值LRN,在升速量较少的情况下,以使卡合待机压力α变低的方式减少学习值LRN。由于发动机转速Ne也会与MG2转速Nm的升速对应地升速,因此,也能够基于发动机转速Ne的升速量来进行卡合待机压力α的学习控制。代替升速量,也能够基于升速时间来进行卡合待机压力α的学习控制。
然后,变速学习部100将上述学习值LRN预先存储于存储装置,另一方面,接着,在执行2→3升挡时,所述AT变速控制部96利用该存储的学习值LRN校正卡合待机压力α,并进行离合器C2的卡合控制。每当利用AT变速控制部96进行2→3升挡时,逐次更新该学习值LRN,通过进行反复学习,从而收敛到大致恒定的值。即,在通过卡合待机压力α的学习控制使升速量成为预定的目标范围内的目标状态下进行变速。图10是学习值LRN的一例,且是划分为作为车辆状态的加速器开度θacc不同的四个区域并进行学习的情况。代替加速器开度θacc,也可以利用节气门开度θth等其它车辆状态进行划分。AT变速控制部96是执行作为自动变速器的有级变速部20的变速控制的变速控制部,并且是使用利用变速学习部100求出的学习值LRN来执行预定的控制(在此为变速控制)的学习值利用控制部。
另外,变速学习部100以将学习值LRN维持在预先设定的保护值Gf的范围内的方式进行限制。图11是说明基于保护值Gf的限制的图,且是示出正(+)侧的限制(上限)的图,横轴是变速次数。图11的实线是例示从最初开始学习控制起的变化的图,在最初开始学习控制时,学习值LRN大幅增大,但增大幅度逐渐变小并收敛于大致恒定的值。图11是学习值LRN处于保护值Gf的范围内即为正的保护值Gf以下的正值且将通过学习控制求出的学习值LRN维持不变的情况。虽然省略图示,但在学习值LRN从保护值Gf的范围脱离的情况下,即在超过正的保护值Gf并增大的情况下,将学习值LRN限制到保护值+Gf以下,在本实施例中,设为LRN=+Gf。对于负(-)侧而言,例如也利用绝对值相同的负的保护值-Gf进行限制,将学习值LRN限制在-Gf≤LRN≤+Gf的范围内。也可以在正侧和负侧确定不同的值的保护值。
代替卡合待机压力α,也可以对图8的待机时间β、变化率γ等其它控制参数进行学习控制。另外,也能够对释放侧的制动器B1的液压指令值的控制类型的待机压力、待机时间、变化率等进行学习控制。对于2→3升挡以外的升挡、降挡而言,也同样地对与卡合侧及/或释放侧的卡合装置CB的卡合液压Pcb相关的预定的控制参数(上述α、β、γ等)进行学习控制。
返回到图1,车辆10利用车辆用软件更新系统110来更新执行上述各种控制的电子控制装置90的程序、数据的一部分或全部。车辆用软件更新系统110构成为具备与电子控制装置90分开设置的一对第一网关ECU120、第二网关ECU126。第一网关ECU120、第二网关ECU126均是构成为具备所谓的微型计算机的电子控制装置,所述微型计算机具有CPU、RAM、ROM、输入输出接口等。
第一网关ECU120及第二网关ECU126与由变速学习部100进行的学习控制相关联地更新所述保护值Gf,并且更新使用所述学习值LRN执行液压控制的AT变速控制部96的变速控制程序,从外部取得与该保护值Gf及变速控制程序相关的更新用软件,在更新保护值Gf的同时,也对变速控制程序进行更新。一般而言,根据需要对保护值Gf进行更新,以便按照更新后的新的变速控制程序进行适当的变速控制。第一网关ECU120及第二网关ECU126均相当于更新控制部。另外,上述第一网关ECU120、第二网关ECU126与功能性地具备AT变速控制部96及变速学习部100的电子控制装置90一起构成车辆10的控制装置。
第一网关ECU120作为无线更新部发挥功能,能够经由无线通信设备122、125在与作为外部的软件分发中心的服务器124之间收发信息,且根据需要而从服务器124下载新的更新用软件并对电子控制装置90的软件(程序、数据)进行更新。软件分发中心由车辆10的制造商等设置,能够经由移动电话网、无线LAN网等无线通信在与第一网关ECU120之间收发信息。代替无线通信设备122,也能够利用所述外部网络通信用天线82。
第一网关ECU120与所述保护值Gf及变速控制程序的更新相关联地按照图12的流程图的步骤S1~S7(以下,省略步骤而简称为S1~S7)执行信号处理。在S1中,判断是否对更新开关进行了接通操作,即判断是否有更新指示,若没有更新指示,则直接结束,在有更新指示的情况下,执行S2以下的步骤。具体而言,例如在对在显示装置89显示的图13的更新选择画面140的更新执行按钮146进行触摸操作的情况下,判断为有更新指示,在对结束按钮148进行触摸操作的情况下,判断为没有更新指示。
图13的更新选择画面140例如在将新的更新用软件上载到服务器124等情况下被显示在显示装置89上。在更新选择画面140设置有显示“可更新的程序&数据”的可更新信息显示部142以及显示“车辆历史记录”的更新历史记录信息显示部144。在可更新信息显示部142显示所有当前可更新的程序、数据即更新用软件,在图13中,与可更新开始日期及更新所需时间一起例示了“VSC控制软件……”及“AT变速控制软件……”这两个。“AT变速控制软件……”是与所述AT变速控制部96的变速控制程序相关的更新用软件,存在包括所述保护值Gf的更新的情况和不包括所述保护值Gf的更新的情况。该可更新的程序&数据的信息由第一网关ECU120自动地从服务器124逐次取入,并在可更新信息显示部142显示。可更新的程序&数据(更新用软件)能够通过触摸操作等而单独地进行选择,车辆10的用户或经销商的维修工厂的技术人员等能够选择一个或多个更新用软件,并通过触摸操作而对更新执行按钮146进行更新。更新用软件的选择操作及更新执行按钮146的触摸操作是更新指示操作。除了与车辆10的购买日期相关的车辆历史记录之外,还在更新历史记录信息显示部144显示软件的更新历史记录信息,能够一眼确认程序、数据的更新历史记录。每当进行更新时,将程序、数据的更新历史记录存储于未图示的更新历史记录信息存储部等。
在S2中,从服务器124下载所选择的一个或多个更新用软件并取入。在S3中,判断在下载的更新用软件中是否包括所述学习控制的保护值Gf的更新,即判断是否包括更新用的新保护值Gfa,在不包括更新用的新保护值Gfa的情况下,立即执行S7。在S7中,利用下载的更新用软件,执行对执行电子控制装置90的各种控制的软件中的对应的软件进行更新的更新处理。
在S3的判断为“是”(肯定)的情况下,即在包含有更新用的新保护值Gfa的情况下,执行S4。在S4中,判断基于学习控制的当前的学习值LRN的绝对值是否比新保护值Gfa的绝对值大,换言之,判断学习值LRN是否从新保护值Gfa的范围脱离。并且,在学习值LRN从新保护值Gfa的范围脱离的情况下,执行S5,以使学习值LRN进入到新保护值Gfa的范围内的方式进行限制。例如在新保护值Gfa为正且LRN>+Gfa的情况下,设为LRN=+Gfa,在LRN<-Gfa的情况下,设为LRN=-Gfa。对于该新保护值Gfa而言,也可以与保护值Gf同样地在正侧和负侧确定不同的值。另一方面,在当前的学习值LRN的绝对值为新保护值Gfa的绝对值以下的情况下,即在学习值LRN处于新保护值Gfa的范围内(-Gfa≤LRN≤+Gfa)的情况下,执行S6,将当前的学习值LRN维持不变。然后,接着S5或S6,执行S7的更新处理。
图14是在时间tg1将保护值Gf更新为新保护值Gfa的情况,实线为LRN>+Gfa,学习值LRN从新保护值Gfa的范围脱离,执行S5,将学习值LRN改写为新保护值Gfa,设为LRN=Gfa。另外,图14的虚线为学习值LRN处于新保护值Gfa的范围内即-Gfa≤LRN≤+Gfa的情况,执行S6,并将当前的学习值LRN维持不变。
第二网关ECU126作为有线更新部发挥功能,具备能够以可通过有线机械地进行装卸的方式连接更新工具130的连接器128。更新工具130预先通过有线通信或无线通信等从服务器124等下载可使用的更新用软件并进行存储,在本实施例中,配备于处理车辆10的各经销商。更新工具130至少使与车辆10相关的更新用软件与软件分发中心的服务器124同步(synchro)。连接器128例如设置在车辆10的驾驶座附近等,在由维修工厂的技术人员等将更新工具130与连接器128连接时,利用第二网关ECU126开始与所述图12的流程图同样的信号处理,能够对包括所述变速控制程序、保护值Gf等在内的电子控制装置90的各种软件(程序、数据)进行更新。在该情况下,在图12的流程图的S2中,由于从作为外部的更新工具130取入更新用软件,因此,即使在无法适当地进行经由无线通信的软件的更新的情况下,也可以使用能够机械地连接的更新工具130可靠地进行该软件的更新。此外,也能够解释为构成车辆10的控制装置的所述电子控制装置90、第一网关ECU120及第二网关ECU126与作为外部的所述服务器124及更新工具130一起构成车辆控制系统。
像这样,根据本实施例的车辆10,在从外部(服务器124或更新工具130)取得更新用的新保护值Gfa并进行更新时,在学习控制之前,利用更新后的新保护值Gfa对学习值LRN进行限制。即,在学习值LRN从更新后的新保护值Gfa脱离的情况下,对学习值LRN进行改写,以使其成为该新保护值Gfa的范围内(S5),另一方面,若处于更新后的新保护值Gfa的范围内,则将学习值LRN维持不变(S6),并反映至此为止的学习。因此,即使在刚刚进行保护值Gf的更新之后,也能够适当地进行使用学习值LRN的变速控制。
另外,与更新用的新保护值Gfa一起取得与使用学习值LRN执行变速控制的AT变速控制部96的变速控制程序相关的更新用软件,并在更新保护值Gf的同时更新该变速控制程序,但可以根据需要对保护值Gf进行更新,以便按照更新后的新的变速控制程序进行适当的变速控制。因此,通过在学习控制或变速控制之前利用更新后的新保护值Gfa对学习值LRN进行限制,即使在刚刚进行保护值Gf的更新之后,也能够按照更新后的新的变速控制程序适当地进行使用学习值LRN的变速控制。
另外,由于第一网关ECU120经由无线通信从服务器124下载包括更新用的新保护值Gfa在内的更新用软件并取入,因此,能够简便地进行包括新保护值Gfa在内的软件的更新。
另外,在本实施例中,在利用AT变速控制部96对搭载于车辆10的有级变速部20的变速所涉及的卡合装置CB的液压Pcb进行控制时,在对作为与该液压Pcb相关的控制参数的卡合待机压力α进行学习控制以便在预先设定的目标状态下进行变速的情况下,在更新AT变速控制部96的变速控制程序时,根据需要同时也对保护值Gf进行更新,以便按照更新后的新的变速控制程序进行适当的变速控制。因此,在变速控制程序及保护值Gf的更新时,在该时刻的学习值LRN从新保护值Gfa的范围脱离时,当按照更新后的新变速控制程序执行变速控制时,有可能会产生变速冲击等变速异常。因此,通过在学习控制之前利用更新后的新保护值Gfa对学习值LRN进行限制,即使在刚刚进行保护值Gf的更新之后,也能够按照更新后的新变速控制程序适当地进行使用学习值LRN的变速控制,能够防止变速冲击等变速异常。
另外,在本实施例中,由于除了经由无线通信更新软件的第一网关ECU120之外,还具备经由有线通信更新软件的第二网关ECU126,因此,即使在无法适当地进行经由无线通信的软件的更新的情况下,也可以使用能够机械地连接的更新工具130可靠地进行该软件的更新。此外,无需具备第一网关ECU120及第二网关ECU126这两者,也可以仅设置任意一方。即,利用无线通信及有线通信中的至少一方进行包括保护值Gf在内的软件的更新即可。
以上,基于附图,对本发明的实施例进行了详细说明,但这只不过为一实施方式,本发明能够以基于本领域技术人员的知识施加了各种变更、改良的形态来实施。
- 车辆用图像获取装置、控制装置、包括了车辆用图像获取装置或控制装置的车辆和车辆用图像获取方法
- 车辆用图像获取装置、控制装置、包括了车辆用图像获取装置或控制装置的车辆和车辆用图像获取方法