一种灯具
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及一种灯具,特别是一种可调节照射方向的灯具。
背景技术
有些商业场景如酒店大厅、体育场馆、演播大厅,屋顶上安装的灯具特别是射灯或筒灯提供照明,但因其层高很高,在需要调整筒灯或射灯光线的照射位置时,普通的筒灯或射灯就不方便操作了。所以如何提供一种可灵活调整照射角度的灯具来满足不同的需求是需要解决的重要问题。
发明内容
针对以上问题,本发明提供了一种新型的灯具,包括灯罩、主体部、所述灯罩罩设在所述主体部上,主体部包括升降装置、水平旋转装置、摆动装置、控制装置、灯头和滑动装置,水平旋转装置与升降装置连接, 所述摆动装置与所述水平旋转装置连接,所述灯头活动连接在所述摆动装置上,控制装置分别与所述升降装置、所述水平旋转装置和所述摆动装置电连接,用于控制所述灯头的运动,其特征在于,所述升降装置包括壳体、第一传动模块、安装于壳体内的升降马达,所述升降马达和所述第一传动模块传动连接,通过所述第一传动模块驱动所述升降装置沿所述滑动装置上下移动,从而带动所述灯头收容或延伸伸出所述主体部。
优选地,第一传动模块包括两端穿过所述壳体的升降轴、安装在所述升降马达输出轴上的升降马达齿轮、套设在所述升降轴上并与所述升降马达齿轮啮合的升降轴齿轮、以及安装在所述升降轴两端的升降齿轮。
优选地,滑动装置包括竖直设置在所述主体部内两侧的升降齿条,升降齿轮与升降齿条啮合连接。
优选地,主体部还包括一个上固定板、沿上固定板周向间隔设置的多个竖直光轴,升降装置的壳体外侧壁设有和所述光轴对应的轴套,所述升降装置通过套设在所述光轴上的轴套沿所述光轴上下移动。
优选地,灯具还包括一个上限位模块,所述上限为模块包括一个设置在壳体内的上限位开关和一个设置在灯罩内壁的上限位档块,所述上限位开关与所述上限位档块配合限制所述升降装置向上移动的距离。
优选地,灯具还包括一个安装在所述主体部靠近出光面一端的面环和一个下限位模块,所述下限为模块包括一个设置在壳体内的下限位开关和设置在所述面环上的第二档快,所述下限位开关和所述第二档块配合限制所述升降装置向下移动的距离。
优选地,所述水平旋转装置包括水平旋转支架、水平旋转马达、第二传动模块,所述水平旋转支架安装在所述升降装置内壳体的底部,且部分穿过壳体底部,所述水平旋转马达设置壳体内,通过第二传动模块驱动所述水平旋转支架旋转。
优选地,水平旋转支架具有中空的内部结构,水平旋转装置还包括一个设置在中空的内部结构中的导电滑环,用于所述升降装置和所述水平旋转装置之间的电连接。
优选地,水平旋转装置还包括旋转角度检测模块,所述旋转角度检测模块包括安装在所述水平旋转马达的输出轴一端的磁铁以及和设置在所述升降装置内并与所述磁铁对应的磁传感器模块,所述磁传感器模块用于检测灯头旋转角度。
优选地,磁传感器模块包括磁传感器、水平零度角检测开关以及设置在水平旋转支架上的零度触块,所述零度触块与所述水平零度角检测开关配合决定所述灯头的零度旋转角度。
优选地,升降装置的壳体底部向外延伸形成凸台,凸台上设置开孔,所述水平旋转支架下部从开孔伸出并通过法兰悬挂设置在在凸台上。
优选地,摆动支架顶部设有分别与所述凸台和所述水平旋转支架下部对应的第一收容部和收容安装部,所述摆动支架通过收容安装部固定在所述水平旋转支架上,所述第一收容部用于容纳凸台并围绕凸台旋转。
优选地,摆动装置包括摆动支架和摆动马达,所述摆动马达设置于所述灯头内,所述摆动支架包括顶壁和顶壁两侧向下延伸形成的第一侧壁和第二侧壁,第一侧壁上设置有开槽,所述摆动马达的输出轴穿过摆动支架第一侧壁的开槽后固定安装在侧壁上。
优选地,第二侧壁外表面设有第二零度角检测模块,用于确定所述灯头摆动的零度角的位置。
优选地,灯具还包括一个通讯模块,所述通讯模块用于接收控制信号并传输给所述控制装置,控制装置根据接收的控制信号控制所述灯头的升降、旋转和摆动运动,用户可以远程发送控制命令等各种控制控制信号来控制灯具实现各种运动。此外,控制装置还可以根据控制信号决定灯头在所述主体部内或主体部外摆动,从而控制灯头下降或上升适合摆动的距离。
本发明提供的可调方向的灯具解决了安装在比较高的位置上的灯具,不需要操作人员登高操作就可以实现调节照射方位的问题,使其灯头能够实现在空间上三个自由度的调节,即在升降、水平旋转和围绕竖直方向的进行摆动的调节,满足了在安装高度以下的空间任意位置的照明需求。本发明采用了独特的运动结构布局实现了灯具灯头的升降、旋转和摆动,其中,运动机构中的升降马达、水平旋转马达及第一传动模块和第二传动模块都安装在升降装置的壳体内,水平旋转支架固定在升降装置内并且部分穿过升降装置的壳体底部与摆动支架连接,这样的布局使灯具的整体更加紧凑,减少了灯具的体积。此外,通过固定在水平旋转支架内的导电滑环实现了升降装置和水平旋转装置之间的电连接,使水平旋转装置带动灯头实现更加灵活的旋转,提高了灯具的整体性能。
附图说明
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
图1为本发明的实施例的灯具正投影示意图;
图2为本发明的实施例的灯具侧投影示意图;
图3为本发明的实施例的灯具的仰视示意图;
图4 为本发明的实施例的灯具的分解示意图;
图5为本发明实施例的灯具灯头在主体部外部不同摆动角度的示意图;
图6为本发明实施例中灯具灯头在主体部部不同摆动角度的示意图;
图7是本发明实施例中灯具的内部结构剖视图;
图8 是发明实施例中灯具的升降装置内部结构示意图;
图9是本发明实施例中灯具主体部结构示意图;
图10是本发明实施例中灯具的水平旋转装置和摆动装置的安装结构示意图;
图11是为本发明实施例中灯具的灯头剖视图;
图12是本发明实施例中灯具灯头的一侧面的立体结构示意图;
图13是本发明实施例中灯具灯头的另一侧面立体结构示意图;
图14和图15是本发明实施例中灯具灯头和摆动装置连接后的不同侧面的侧视图;
图16是本发明实施例中灯具内部结构的仰视图。
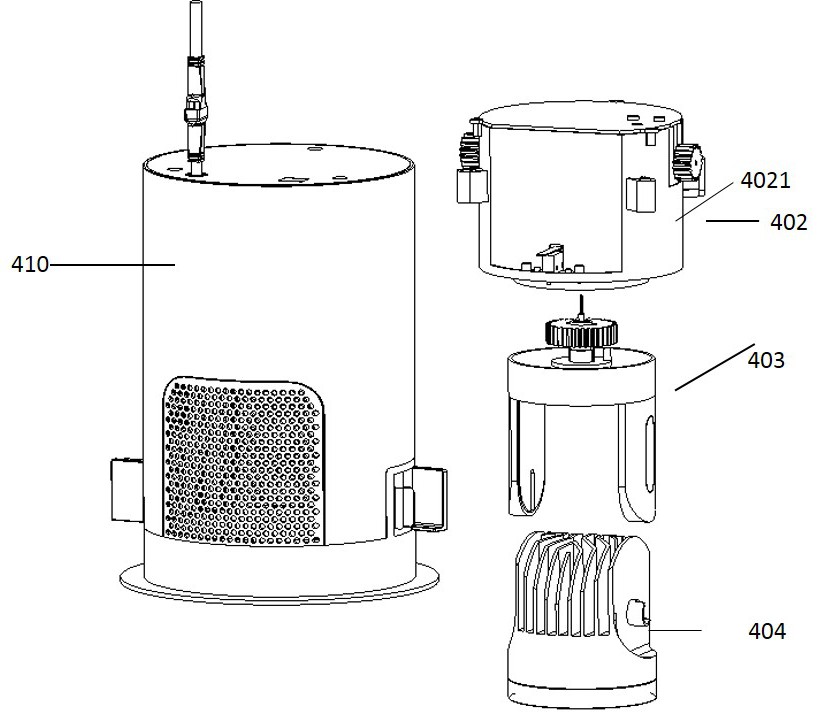
附图标记:401、灯罩;402、702、902升降装置;403、摆动支架;4021、壳体;404、704、灯头;705、升降齿轮;707、升降轴;708、面环;710、升降轴固定支架;711、导电滑环;712、水平旋转支架;713、摆动支架;714、联轴器;715、摆动马达;716、配光透镜;717、灯头前盖;718、灯体顶盖;719上固定板;720、升降装置顶盖;721、升降马达固定支架;722、水平旋转马达;723、水平旋转齿轮;724、磁铁;725、磁传感器模块; 727、安装固定架;728、升降马达齿轮;729、升降轴齿轮; 770、水平旋转装置。
具体实施方式
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
图1、图2、图3为本发明实施例的灯具正投影、侧投影及仰视示意图。如图1、图2和图3所示,灯具100包括灯罩110、面盖120、网孔板140、主体部(未示出)、安装支架130和电源电缆114, LED光源314,其中灯罩110罩设在主体部尚,灯罩在侧壁上设有两对大小不同的开槽,每对开槽相对设置,面盖120安装在灯罩110出光的前端面上,安装支架130设置在主体部上,安装时灯罩110罩设在主体部上,安装支架130通过灯罩侧壁上的一对开槽伸出灯罩外;网孔板140配合安装在灯罩110侧壁上的另一对相对设置的开槽中,安装后网孔板140的外表面和灯罩110侧壁的外表面齐平,网孔板上设有多个用于散热的小孔,网孔板140不仅用于散热,而且还可以根据不同场合的需要配置成不同颜色,对灯罩110起到装饰美化作用,此外本实施例中网孔板140是一个单独可拆卸的部件,可以根据不同的需求替换成具有不同颜色或不同大小孔径的网孔板。并且不限于此,网孔板也可以是灯罩的一部分。供电电缆114穿过顶面面盖150给灯具的主体部供电,本实施例中供电采用外置电源供电方式,采用外置电源的方式可以减少灯具的体积,使灯具整体更加紧凑,成本更低。也可以采用内置电源供电方式,内置电源供电方式使灯具整体更加简洁、安装也方便。
如图4到图9所示,本发明提供一种灯具,包括主体部910、设置于主体部内的升降装置402、702、802、902,水平旋转装置770、设置有摆动支架403的摆动装置910、控制装置(未示出)、灯头404和滑动装置,本实施例中滑动装置包括设置在主体部两侧的齿条705、905;其中升降装置402、702、802、902、水平旋转装置770和摆动装置依次连接,水平旋转装置770与升降装置402连接,摆动装置通过摆动支架403连接在水平旋转支架712上,灯头404活动连接在摆动支架403上,水平旋转装置770和摆动支架403随着升降装置402、702、902的升降而上下运动,带动与通过摆动支架403连接的灯头404做上下移动;此外,水平旋转装置770旋转带动灯头404做水平旋转运动,摆动装置驱动灯头404以灯具竖直轴为中心左右摆动;控制装置分别与升降装置、水平旋转装置和摆动装置电连接,用于控制灯头的上述升降,水平旋转和摆动的运动方式,在空间上实现对灯头404在三个自由度上的调节,使灯具在安装高度以下的空间完成任意位置的照明,既满足了不同的客户需求并且也减少了维护成本;升降装置402包括壳体4021、壳体由侧壁和底面围成一个向上开口的腔体,顶盖可拆卸地安装在壳体开口的上端面上;升降装置402、702、802、902还包括安装于壳体内的升降马达830、以及安装在升降马达830和滑动装置之间的第一传动模块,升降马达830的输出轴和第一传动模块传动连接,通过第一传动模块驱动升降装置402、702、802、902沿滑动装置的齿条705、905上下移动,带动灯头404收容或延伸伸出主体部。主体部910还包括通讯模块,通讯模块通过无线或有线接收的用户的控制信号后传输给控制装置,,比如用户使用遥控器、手机或其它终端发送各种遥控指令等控制信号给灯具,控制装置根据收到的控制信号控制灯具灯头404上下移动,并在灯罩内或伸出灯罩做水平旋转或摆动。参照图5,灯具灯头404在控制信号控制下伸出主体部以灯具竖直轴为中心轴实现了0度即竖直方向、45度和对立面物体的重点照明的90度摆动。参照图6,灯具灯头404在控制指令控制下在灯罩内以灯体竖直轴为中心轴实现了不同角度地摆动,本实施例中灯头摆动在0度角位置,和40度角位置。用户可以根据实际需要进行调节,可以灵活的对灯具进行控制,以满足不同的照射角度需求。
如图7、图8和图9所示,主体部910包括设置在顶端的顶盖718,上固定板719、919、沿上固定板周向间隔设置的多个竖直光轴931,升降装置702、902的壳体外侧壁设有向外凸出并和光轴931对应的轴套932,升降装置702、902通过套设在光轴931上的轴套932沿光轴上下移动,光轴931在升降装置702、902上下运动时限制其晃动,使其在运动中保持平衡;本实施例中采用四个光轴,及壳体上的四个轴套,轴套和光轴个数并不限于四个,也可以采用其它数量的光轴和轴套。本实施例中主体部的面环708、908上部还设有安装固定部(未示出),光轴931设置在安装固定部931和上固定板719、919之间,两端用螺丝或其它紧固结构固定在安装固定部和上固定板上。
升降装置702、902还包括升降马达固定支架721、升降轴固定支架710,升降马达830安装在升降马达固定支架721上。第一传动模块包括升降轴707、807、安装在升降马达830输出轴上的升降马达齿轮728、828、套设在降轴707、807上并与升降马达齿轮728、828啮合的升降轴齿轮729、829、升降齿轮706、906,升降轴用升降轴固定支架721固定在升降装置702、902内,其两端穿过壳体4021,升降齿轮906安装在升降轴707、807两端,本实施例中两个升降轴固定支架710包括竖直部以及竖直部下端水平延伸而成的水平部,竖直部和水平部构成L型的升降轴固定支架710,水平部设有安装孔,升降轴安装支架710用螺钉通过安装孔固定在升降装置702、902的底部的安装柱上,在升降轴安装支架710的竖直部远离水平部的一端设有固定孔,升降轴707穿过升降轴固定支架的固定孔,并穿过壳体延伸伸出到升降装置702壳体外,升降轴707伸出的两端分别套设有升降齿轮706、906。
本实施例中,滑动装置包括两个竖直安装在主体部两侧的上固定板719和面环708之间的齿条705、905,升降轴707、907两端的升降齿轮706、906分别与两条齿条705、905啮合,通过齿轮之间的摩擦力和光轴931和轴套932之间的摩擦力使升降装置702、802、902在升降马达830不工作时保持静止。
升降马达830通过第一传动模块驱动升降装置702沿滑动装置上下运动,具体而言,当升降马达830接收到升降控制信号时,其输出轴转动带动设置在输出轴上的升降马达齿轮728转动,促使与其啮合的升降轴齿轮729转动,从而带动升降轴707转动,升降轴707的转动又进一步带动固定在其两端的升降齿轮706沿齿条705上下移动,使升降轴707上下滑动,升降轴的上下移动又带动升降装置及灯头的升降运动。
参考图8,灯具的还包括一个上限位模块,上限位模块包括一个设置在升降装置802的壳体内的上限位开关832和一个设置在灯罩内壁的上限位挡块(未示出), 上限位开关832设置在升降装置802的壳体底面靠近侧壁的位置上,与上限位开关832相对应的壳体侧壁上设有开孔,上限位开关832还包括一个开关触臂,开关触臂穿过壳体开孔伸出壳体,上限位开关832通过开关触臂和上限位档块配合限制升降装置802向上移动的距离,具体而言,在升降装置802上升过程中,当上限位开关832的开关触壁触碰到上限位挡块时,上限位开关832的状态发生改变,灯具的控制装置(未示出)与上限位开关832电连接并实时检测上限位开关832的状态,当发现到上限位开关832的状态改变后输出控制信号使升降马达停止工作,从而使升降装置802停止向上运动,通过上限位模块,使升降装置在预定的范围内上升,使其移动更加安全、可靠。
灯具的主体部还包括一个下限位模块,下限位模块包括一个设置在壳体底面上的下限位开关831和设置在面环708上的第二档快, 下限位开关831包括一个第二开关触臂,第二开关触臂延伸伸出壳体侧壁外,下限位开关831利用第二开关触臂和第二档块配合限制升降装置802向下移动的距离,在升降装置802在向下移动过程中,当下限位开关831的第二开关臂碰触到前端面环708的第二档块时,下限位开关状态发生改变,灯具的控制装置检测到下限位开关的状态改变后,发出控制信号使升降马达停止工作。通过设置上、下限位开关可以控制升降装置704、802、902升降的行程,使其在一个预设的安全范围中移动。
图10是本发明实施例中灯具的水平旋转装置和摆动装置的安装结构示意图;结合图7和图10,水平旋转装置770包括水平旋转支架712、1012,水平旋转马达722、1022,第二传动模块,水平旋转支架712、1012安装在升降装置702壳体的底部,壳体的底部向外凸出形成凸台,凸台上设有开孔,水平旋转支架712一部分从开孔穿过壳体底部,并依靠自身法兰悬挂在壳体底部,水平旋转马达722、1022设置在升降装置1002的壳体内,通过第二传动模块驱动水平旋转支架712旋转,进而带动与水平旋转体连接的灯具灯头旋转。
水平旋转支架712、1012的法兰把水平旋转支架712、1012分成上下两部分,法兰的直径大于升降装置1002的壳体底部凸台上的开孔的孔径,法兰以下的水平旋转支架部分的直径小于开孔的直径,当水平旋转支架1012安装在壳体底部时,水平旋转支架1012通过自身的法兰悬挂于壳体的底部上,法兰以下的部分穿过的开孔伸出到壳体外面,水平旋转支架1012上端由升降马达支架1021实现轴向和径向固定;第二传动模块包括水平旋转齿轮1033和水平旋转马达齿轮1023,水平旋转齿轮1033套设在水平旋转支架1012法兰以上的部位的,水平旋转马达1022输出轴上安装有水平旋转马达齿轮1023,水平旋转马达齿轮1023和水平旋转齿轮1033啮合,水平旋转马达1022输出轴的转动通过第二传动模块带动旋转支架水平转动。
水平旋转装置770还包括一个导电滑环711、1011,水平旋转支架712、1012具有中空的内部结构,导电滑环安装在水平旋转支架712、1012的中空的内部结构中,通过导电滑环711、1011实现了控制装置和摆动装置及灯头404的电连接,导电滑环711一端与电源模块或控制模块(图中未示出)电连接,另一端通过电缆与灯头电连接。此外,通过导电滑环711、1011也实现升降装置702、1022与水平旋转装置712、1012的电连接,导电滑环可实现水平旋转装置的无限制水平旋转,如可以一直按照顺时针旋转,或者一直按照逆时针方向旋转,而没有旋转角度大小的限制,这样使灯头的旋转角度更加容易控制。
水平旋转装置770还包括旋转角度检测模块,所旋转角度检测模块包括设置在水平旋转马达输出轴一端的磁铁724,如可以固定于水平旋转马达齿轮1023的轴心位置的磁铁724、1024,以及设置在升降装置702、1002壳体底部并与磁铁724、1024对应的磁传感器模块725,磁铁724、1024随齿轮水平转动,从而在磁铁周围空间形成水平旋转磁场,磁传感器模块725用于检测灯头旋转角度,通过检测水平旋转磁场的变化计算出当前的旋转角度位置,其包括水平零角度位置检测开关1027和磁传感器,水平零角度位置检测开关1027包括一个触臂,与其对应在水平旋转支架上1012设置有零度触块,零度触块与水平零度检测开关1027配合决定所述灯头的旋转角度。具体而言,当水平旋转支架1012旋转触碰到零度触块时,把灯头位置设置为零度角位置,水平零角度位置检测开关确定零度角位置后,磁传感器根据磁铁的旋转导致的磁场强度变化和零度角的位置,计算出水平旋转的角度大小。
摆动支架1013包括顶壁、及设置在顶壁两端的第一侧侧壁和第二侧壁,顶壁边缘向上延伸形成第一收容部,第一收容部与升降装置702、1002的壳体底面的凸台1013配合连接并且可以围绕凸台旋转;摆动支架顶部还设有与水平旋转支架下端对应的收容安装部,水平旋转支架的下端收容在收容安装部,并用螺钉通过收容安装部把摆动支架固定在水平旋转支架上。
灯具灯头设置在两个侧壁之间,灯头404两侧分别与摆动支架的第一侧壁和第二侧壁1026活动连接。
图11是为本发明实施例中灯具的灯头结构剖视图;结合图7、图10和图11,摆动装置1130包括摆动支架1113、摆动马达715、1115,摆动马达715、1115设置于灯头404内,摆动马达715的输出轴固定在摆动支架1113的第一侧壁1026上,通过摆动马达带动灯头404在竖直方向上绕摆动支架摆动。
灯具灯头包括散热器1112,设置在光源板上的LED光源1119,光源板固定在散热器1112底面上,透镜覆盖在LED光源上并用卡扣结构安装在透镜支架1118并固定在散热器的底面上。散热器1112一侧设置有侧面开口的空腔用于容纳摆动马达715、1115,摆动支架1113的第一侧壁上设置有长条的开槽,安装时摆动马达1115的输出轴穿过摆动支架的第一侧壁的开槽,然后固定在第一侧壁上,如图15所示本实施例中,摆动支架1113第一侧壁上设有螺孔柱1515,利用联轴器1514分别夹紧摆动马达1115带有扁位的输出转轴和螺孔柱,然后用螺钉穿过联轴器中间的开孔锁紧。采用以上固定方式,因为摆动马达1115的转轴与摆动支架1113的第一侧壁紧固,所以摆动马达工作时,摆动马达1115本体的转动带动灯头404做摆动,又因为摆动马达1115放在灯具灯头的散热器内,没有占用灯具的主体部其它空间,节省了空间,使整个灯具的体积变得更紧凑,也使灯具的主体部内器件布局更简洁。
如图12、图13和图14所示,和安装摆动马达输出轴的第一侧壁相对的第二侧壁的外表面面设有第二零度角检测模块1426,用于确定灯头1204的摆动时零角度的位置。和摆动马达输出轴相对的灯头1204的另一侧设有突出的空心转轴1310,空心转轴1310的末端设有缺口1311、1411,空心转轴1310穿过摆动支架1113第二侧臂上的开槽和第二零度角检测模块配合实现零角度检测,第二零度角检测模块包括第二限位开关1426,当灯头1204处于竖直位置时,中空转轴1310的缺口1311、1411的边缘碰触第二限位开关的触点,改变了第二限位开关1426的状态,灯具的控制装置根据检测到的第二限位开关1426的状态判断出灯头当前处于零角度位置,即处于垂直位置,灯头垂直零度角位置确定后,控制装置可以根据控制信号利用步进电机控制灯头的摆动角度。此外,当灯具上电工作时,先通过中空转轴1411的边缘缺口触碰第二限位开关的触点确定灯头的零度角位置,然后利用步进电机控制灯头的旋转角度。
如图16所示,灯具面环1612内侧设置了图像传感器1613和通讯模块1611,图像传感器1613用于采集目标区域的图像信息,然后发给图像处理模块进行处理,得到需要的信息。灯具可以根据图像处理得到的信息做出对应的照明方式,如改变灯具的照射方位,调整灯具的颜色,调整灯具光的色温等等。通讯模块可以采用无线通信方式,如WIFI、蓝牙或红外等等,也可以采用有线通信方式,如通过IP局域网或DALI、DMX等有线网络通信方式。通讯模块可以和遥控设备进行通讯,接收用户发出遥控指令等各种控制信号并把遥控指令传输给控制装置,控制装置根据控制信号控制灯头完成升降、旋转和摆动等各种运动。此外,灯具的控制装置可以根据控制信号决定灯头是在主体部内摆动货主体部外摆动,这样用户可以更加灵活的对灯具进行控制,以满足不同的照射角度需求。
应该注意的是上述实施例对本发明进行说明而不是对本发明进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。本发明可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。
至此,本领域技术人员应认识到,虽然本文已详尽示出和描述了本发明的多个示例性实施例,但是,在不脱离本发明精神和范围的情况下,仍可根据本发明公开的内容直接确定或推导出符合本发明原理的许多其他变型或修改。因此,本发明的范围应被理解和认定为覆盖了所有这些其他变型或修改。
- 一种灯具固定座、灯具适配器、灯具以及灯具组件
- 模块化灯具A、灯具B1、灯具C1、灯具D1以及灯具E1