一种基于磁致伸缩材料自供能动态称重装置及工作方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明专利涉及车辆动态称重技术领域,具体涉及一种基于磁致伸缩材料自供能动态称重装置及工作方法。
背景技术
为了保护路面、桥梁不被超重车辆破坏,如今越来越多的公路上开始对汽车进行称重检测。目前主流的称重装置分为动态称重与静态称重,静态称重相对于动态称重来说虽其不受外力影响,因此其误差也相对较小,但其无法测量其单个轴重,且车辆进行称重时,车道过车速度降低,导致车道通行效率明显降低,造成不必要的交通堵塞。而动态称重则在车辆正常行驶的情况下,完成称重检测,节约了检测时间,提高了检测效率,这对缓解道路交通堵塞压力有着极为重要的意义。这与如今实现“智慧城市”的目标相一致,因此车辆进行动态称重将成为一种趋势。
但现有的动态称重系统如:电阻式动态称重装置、弯板式动态称重装置等,都存在设备占地面积大、安装较为繁琐、为了埋线对路面的开凿面积大等问题。因此,设计一套具有体积小,灵敏度高、稳定性好、以及可靠性高且能够进行自供能的车辆动态称重传感器是有必要的。
发明内容
本发明的目的在于提供一种基于磁致伸缩材料自供能动态称重装置及工作方法。
本发明一种基于磁致伸缩材料的压电动态称重装置,包括底座、支撑板、承重柱、导向组件、称重组件和自供能组件。称重组件安装在底座上,用于检测支撑板上承载的重量。导向组件安装在底座上;导向组件内设置有能够上下滑动的横梁。承重柱与横梁固定,底端抵住称重组件,顶端与支撑板固定。所述的横梁上设置有一根或多根供能臂。供能臂采用弹性材料。
所述的自供能组件的数量与供能臂的数量对应。自供能组件包括推动板、传动组件、叶轮和磁致伸缩能量收集模块。推动板安装在对应供能臂的外端。推动板随供能臂的运动而运动;推动板运动通过传动组件带动叶轮旋转。磁致伸缩能量收集模块安装在底座上,包括磁致伸缩棒、感应线圈和永磁体。感应线圈和永磁体均设置在磁致伸缩棒的周围。磁致伸缩棒与叶轮的位置对应。当叶轮上叶片将拨动到磁致伸缩棒,使得磁致伸缩棒发生振动。
作为优选,所述的导向组件还包括地桩、导向柱、悬架弹簧和定位螺母。两个地桩均固定在底座上,且分别位于称重组件的两侧。两个地桩的顶部均固定有竖直设置的导向柱。横梁呈十字形,其中两根支臂为导向臂,另两根支臂为供能臂。导向臂采用刚性材料;两根导向臂外端开设的导向孔与两根导向柱分别构成滑动副。导向柱的上半段设置有外螺纹,且外螺纹上旋有定位螺母。两根导向臂分别位于两个定位螺母的下侧。两个导向柱上均套置有高弹性系数的悬架弹簧。悬架弹簧的两端分别抵住地桩、导向臂。
作为优选,所述的称重组件包括压电传感器和压电片卡座。压电片卡座固定在底座上。压电片卡座的顶部开设有传感器安装槽。传感器安装槽内安装有检测面朝上设置的压电传感器。压电传感器的信号输出线连接到信号处理模块。信号处理模块包括依次连接的电荷放大器、模数转换器和无线传感器模块。无线传感器模块与上位机无线通信。
作为优选,所述的传动组件包括齿轮安装板、第一传动轴、第二传动轴、第三传动轴、输出转轴、第一级输入齿轮、第一级输出齿轮、第二级输入齿轮、第二级输出齿轮、第三级输入齿轮、第三级输出齿轮和末级输出齿轮。齿轮安装板与底座固定。第一传动轴、第二传动轴和第三传动轴均支承在齿轮安装板上。第一级输入齿轮和第一级输出齿轮均固定在第一传动轴上。第二级输入齿轮和第二级输出齿轮均固定在第二传动轴上。第三级输入齿轮和第三级输出齿轮均固定在第三传动轴上。末级输出齿轮固定在输出转轴上。第一级输出齿轮与第二级输入齿轮啮合。第二级输出齿轮与第三级输入齿轮啮合。第三级输出齿轮与末级输出齿轮啮合。推动板的外侧边缘设置有轮齿。第一级输入齿轮与推动板外侧的轮齿啮合。末级输出齿轮与输出转轴连接。叶轮与输出转轴固定。
作为优选,所述承重柱的底部设置有弹性垫片。所述的承重柱采用高分子尼龙橡胶。弹性垫片采用橡胶垫片。
作为优选,所述叶轮上的叶片采用弹性材料。
作为优选,感应线圈的输出接口通过稳压模块连接到超级电容。
作为优选,所述叶轮的叶片侧面与叶轮的轴线平行。
作为优选,所述的末级输出齿轮与输出转轴通过单向轴承连接。
该基于磁致伸缩材料自供能动态称重装置的工作方法,具体如下:
步骤一、在道路长度方向上布置相隔距离h的两个称重装置组。单个称重装置组包括沿着道路宽度方向依次排开的多个前述的动态称重装置。
步骤二、当车辆压上动态称重装置时,压力通过承重柱传递到称重组件和横梁上;称重组件输出压电信号;该压电信号对应车辆的重量。
同时,横梁受压后向下移动,具有弹性的供能臂发生弯曲,带动叶轮转动;叶轮在转动的过程中,叶片拨动磁致伸缩棒,致使磁致伸缩棒发生振动,使得感应线圈周围的磁场发生变化;感应线圈中产生电流,实现发电。
步骤三、当被检测车辆每对车轮通过第一个称重装置组时,分别记录响应时刻t
对于一个称重装置组,根据相邻两次检测的时间差是否小于时间阈值t
本发明具有的有益效果是:
1、本发明专利利用磁致伸缩材料,将路面产生的振动能量收集,为压电传感器电荷放大电路、电源转换模块、信号采集模块以及数据无线传输模块供能,实现能量完全自供,避免了布线所对路面造成的破坏。
2、本发明利用多级齿轮,在受到路面的压力时,带动终端的叶轮转动,从而拨动磁致伸缩材料的振动。这种拨动能够使得磁致伸缩材料的振动时间更长,从而增加整个装置产生的能量。
3、本发明采用压电材料作为传感单元,设计的结构小,且内部放置多个压电传感器,具有灵敏度高,稳定性好,安装简易等优点。也避免了对路面开凿大的问题。
4、本发明的工作方法中利用检测到各车轮的时间,测算出车辆的车速、轮距、轴数等参数,能够实现道路通行车辆的综合数据采集。
附图说明
图1为本发明的第一张整体结构示意图;
图2为本发明的第二张整体结构示意图;
图3为本发明中磁致伸缩能量收集模块的结构示意图;
图4为本发明中传动组件的运动简图。
具体实施方式
以下结合附图对本发明作进一步说明。
实施例1
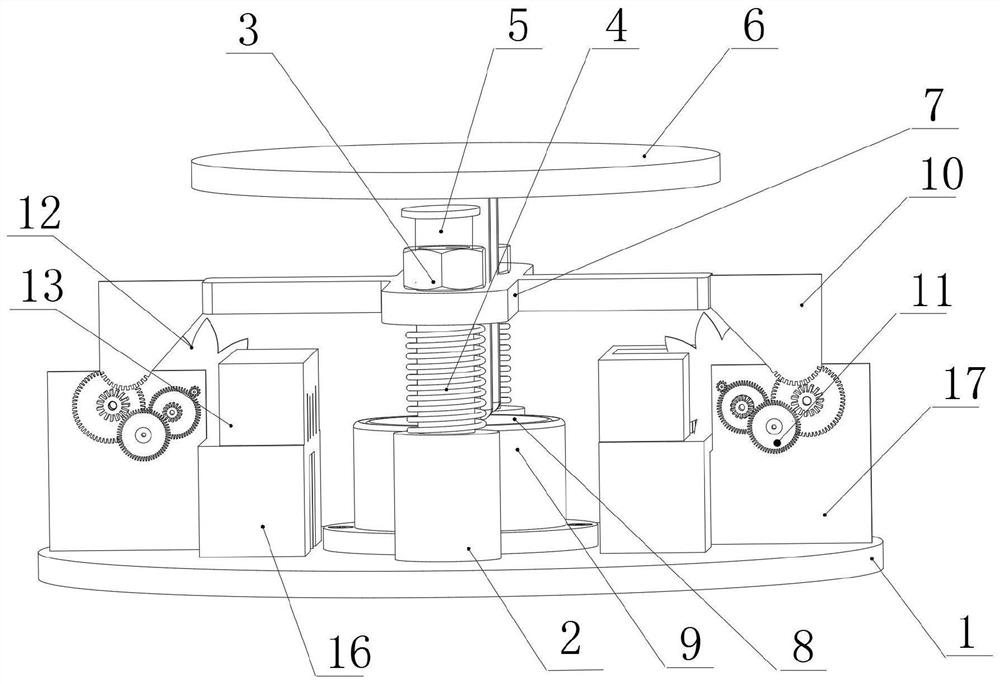
如图1和2所示,一种基于磁致伸缩材料的压电动态称重装置,包括底座1、支撑板6、承重柱17、导向组件、称重组件和自供能组件。承重柱17采用高分子尼龙橡胶。称重组件包括压电传感器8和压电片卡座9。压电片卡座9底部延伸的耳上打有螺栓孔,用螺栓将压电片卡座9与底座1顶面的中心位置进行固定。压电片卡座9的顶部开设有传感器安装槽。传感器安装槽内安装有检测面朝上设置的压电传感器8。压电传感器8包括串联起来的四个压电片;压电传感器8的信号输出线连接到信号处理模块。信号处理模块包括依次连接的电荷放大器、模数转换器和无线传感器模块。无线传感器模块与上位机无线通信。
导向组件包括地桩2、导向柱3、悬架弹簧4、定位螺母5和横梁7。两个地桩2均固定在底座1上,且分别位于称重组件的两侧。地桩2的顶面与压电片卡座9的顶部边缘平齐,有效避免因悬架弹簧4变形而产生测量误差。为保证连接牢固,采用了焊接的方式,将地桩2焊接在底座1上。两个地桩2的顶部均固定有竖直设置的导向柱3。横梁7呈十字形,其中两根支臂为导向臂,另两根支臂为供能臂。导向臂采用刚性材料;供能臂采用弹性材料。两根导向臂外端开设的导向孔与两根导向柱3分别构成滑动副。导向柱的上半段设置有外螺纹,且外螺纹上旋有定位螺母5。两根导向臂分别位于两个定位螺母5的下侧。两个导向柱上均套置有高弹性系数的悬架弹簧4。悬架弹簧4的两端分别抵住地桩2、导向臂。通过调节定位螺母5的位置来调节横梁7的初始位置。导向柱3的顶部设置有凸台,防止定位螺母5滑丝导致弹簧脱离导向柱3。
两根承重柱17的顶端均与支撑板6的底面固定,底端抵住压电传感器8的顶面。承重柱17的底部设置有弹性垫片14;一方面增大横梁7的下降距离,另一方面增大缓冲,减小冲击,从而一定程度上保护了压电片。弹性垫片14采用橡胶垫片。两根承重柱17的中部设置有方形的让位部分。让位部分上开设有横向贯通的让位孔。两个导向臂分别穿过承重柱17的让位孔。两个导向臂的侧面上焊接固定有限位块15。限位块15抵住对应承重柱17的让位部分,防止承重柱17发生滑移。
如图1、2和3所示,自供能组件共有两个;两个自供能组件分别设置在的压电片卡座 9两侧,且与两根供能臂分别对齐。自供能组件包括推动板10、传动组件11、叶轮12、磁致伸缩能量收集模块13、橡胶垫14、限位块15、支撑座16和齿轮安装板17。推动板10 固定在对应供能臂的外端。支撑座16和齿轮安装板17固定在底座1上。支撑座16位于齿轮安装板17与称重组件之间。推动板10的外侧边缘设置有轮齿。传动组件11安装在齿轮安装板17,采用四级增速齿轮组,第一级输入齿轮11-1与推动板10外侧的轮齿啮合,末级输出齿轮11-7固定在输出转轴上。
如图4所示,传动组件11包括第一传动轴、第二传动轴、第三传动轴、输出转轴、第一级输入齿轮11-1、第一级输出齿轮11-2、第二级输入齿轮11-3、第二级输出齿轮11-4、第三级输入齿轮11-5、第三级输出齿轮11-6和末级输出齿轮11-7。第一传动轴、第二传动轴和第三传动轴均支承在齿轮安装板17上。第一级输入齿轮11-1和第一级输出齿轮11-2 均固定在第一传动轴上。第二级输入齿轮11-3和第二级输出齿轮11-4均固定在第二传动轴上。第三级输入齿轮11-5和第三级输出齿轮11-6均固定在第三传动轴上。末级输出齿轮11-7固定在输出转轴上。第一级输出齿轮11-2与第二级输入齿轮11-3啮合。第二级输出齿轮11-4与第三级输入齿轮11-5啮合。第三级输出齿轮11-6与末级输出齿轮11-7啮合。
磁致伸缩能量收集模块13安装在支撑座16上,包括磁致伸缩棒13-1、感应线圈13-2、永磁体13-3和线圈骨架13-4。磁致伸缩棒13-1采用Galfenol材料。两个线圈骨架13-4间隔固定在支撑座16上。磁致伸缩棒13-1的两端与两个线圈骨架13-4分别固定。两个感应线圈13-2分别绕置在两个线圈骨架13-4上。两个永磁体13-3分别固定在磁致伸缩棒13-1 的两端端部。磁致伸缩棒13-1与叶轮12的位置对应。当叶轮12上叶片将拨动到磁致伸缩棒13-1的中部,使得磁致伸缩棒13-1发生振动;叶轮12上的叶片采用弹性材料,避免在拨动中损伤磁致伸缩棒13-1。磁致伸缩模块13由导磁壳整体罩住。各感应线圈13-2的输出接口均通过稳压模块连接到超级电容,来存储电能。超级电容为无线传输模块供电,从而能够将压电传感器检测到的重量压电信号无线发送到上位机。
本发明的工作原理如下:
步骤一:在道路长度方向上布置相隔距离h的两个称重装置组。单个称重装置组包括沿着道路宽度方向依次排开的多个前述的动态称重装置。保障行驶在该道路上的车辆均能够通过动态称重传感器。能够通过两个称重装置组检测到同一辆车的时间差来估算该车辆的速度。
步骤二:当车辆压上动态称重装置时,压力通过承重柱17传递到压电传感器8和横梁 7上;压电传感器8输出压电信号;该压电信号经过处理能够反映车辆的重量。
同时,横梁7受压后向下移动,具有弹性的供能臂发生弯曲,带动传动组件11内的第一级输入齿轮11-1旋转,从而利用传动组件11带动叶轮12;由于传动组件11是增速齿轮组,故第一级输入齿轮11-1的小幅度转动能够带动叶轮12较大幅度的转动。叶轮12在转动的过程中,叶片拨动磁致伸缩棒13-1,致使磁致伸缩棒13-1发生振动。磁致伸缩棒13-1 在受到应力和由永磁体13-3提供的偏置磁场的情况下,磁致伸缩薄棒13-1自身会发生微弱形变,磁致伸缩棒13-的磁化状态也会改变,此时感应线圈13-2内的磁通量会发生改变。根据法拉第电磁感应定律,线圈骨架13-4上的感应线圈13-3会产生感应电动势,而两个线圈骨架13-4上各缠绕一个感应线圈,能够大大增加收集到的能量,且能量收集线圈将电能输入到超级电容中储存起来,为信号处理模块供电。
步骤三:当被检测车辆每对车轮通过第一个称重装置组时,分别记录响应时刻t
对于一个称重装置组,根据相邻两次检测的时间差是否小于时间阈值t
计算被检测车辆行驶速度
步骤四:在汽车离开后,在承重柱17自身弹力和两侧悬架弹簧4的作用下,承重柱17恢复至原状态。
实施例2
本实施例与实施例1的区别在于:叶轮12的叶片侧面与叶轮12轴线相平行;使得叶片在触碰到磁致伸缩棒13-1后更容易弯曲,减小能力损耗。
实施例3
本实施例与实施例1的区别在于:末级输出齿轮与输出转轴通过单向轴承连接;使得末级输出齿轮只能带动输出转轴沿一个方向转动,从而避免末级输出齿轮转向变化时,限制输出转轴和叶轮12继续转动。
- 一种基于磁致伸缩材料自供能动态称重装置及工作方法
- 一种基于超磁致伸缩材料的称重装置及方法