一种光纤陀螺本征频率的在线跟踪方法及系统
文献发布时间:2023-06-19 10:44:55
技术领域
本发明属于光纤陀螺技术领域,更具体地,涉及一种光纤陀螺本征频率的在线跟踪方法及系统。
背景技术
光纤陀螺是一种基于Sagnac效应的角速率传感器,由于其成本低、工艺简单、可靠性高、抗冲击振动能力强,其应用前景备受重视,已经成为主流的传感器之一。高精度光纤陀螺一般采用四态方波过调制技术对光纤陀螺进行偏置调制,要求四态方波调制频率与光纤陀螺实际本征频率一致。但在现有的光纤陀螺中,调制频率根据常温下测得的本征频率进行设定。
在陀螺进行变温过程中,由于光纤敏感环的物理长度及快轴的有效折射率均随温度发生变化,所以光纤陀螺的实际本征频率随周围环境温度的变化而变化,导致光纤环长度及光纤环平均直径的相同温变趋势之间相互叠加,使光纤陀螺标度因数全温稳定性变差。四态方波调制频率与光纤陀螺实际本征频率产生的偏差还会导致探测器信号中的“尖峰脉冲”信号展宽,陀螺解调信号中包含的“尖峰脉冲”高频成分发生变化,使光纤陀螺产生零偏漂移,从而对高精度光纤陀螺的全温精度产生不利影响,因此传统的四态方波调制方法不能跟踪光纤陀螺实际本征频率。
发明内容
针对现有技术的至少一个缺陷或改进需求,本发明提供了一种光纤陀螺本征频率的在线跟踪方法及系统,旨在解决传统的四态方波调制方法不能跟踪光纤陀螺实际本征频率的技术问题。
为实现上述目的,按照本发明的一个方面,提供了一种光纤陀螺本征频率的在线跟踪方法,该方法包括:
获取的光纤陀螺本征频率τ和频率生成器的赋值,输入频率生成器的赋值以输出对应的闭环控制回路时钟,将闭环控制回路时钟发送至逻辑处理器;
逻辑处理器基于闭环控制回路时钟并依据光纤陀螺本征频率τ生成对应的不对称四态方波信号和锯齿波信号,将两个信号叠加得到调制信号,其中,不对称四态方波信号的周期为2τ,每个周期中相位浮动为±φ的持续时间为
调制信号经过光纤陀螺的闭环控制回路传输后,被逻辑处理器接收得到待解调信号,解调待解调信号获取本征频率误差值,解调过程包括:同一个周期内的第一个
利用本征频率误差值更新频率生成器的赋值和获取的光纤陀螺本征频率,重复迭代上述步骤直至达到迭代终止条件,输出迭代终止时获取的光纤陀螺本征频率。
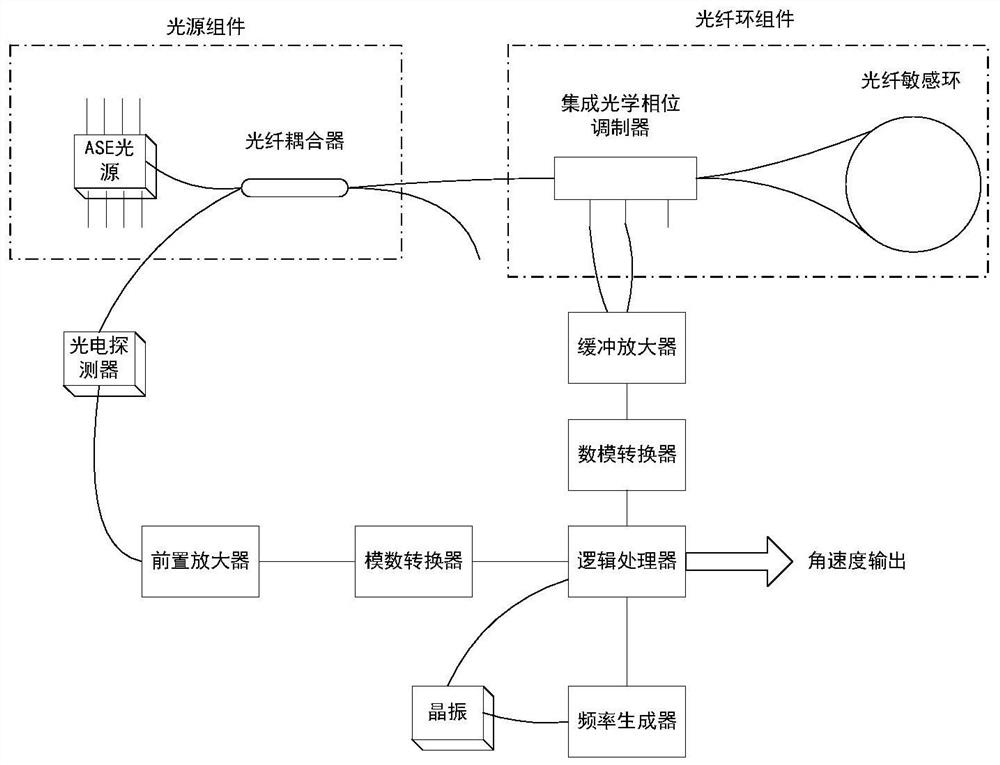
作为本发明的进一步改进,光纤陀螺包括依次连接的ASE光源、光纤耦合器、集成光学相位调制器和光线敏感环,其中,光纤耦合器的反馈端依次通过光电探测器、前置放大器和模数转换器后输入至逻辑处理器的信号接收端,集成光学相位调制器的控制端依次通过缓冲放大器和数模转换器后连接至逻辑处理器的信号发送端。
作为本发明的进一步改进,光纤陀螺本征频率和频率生成器的赋值的初始值获取过程包括:获取光纤陀螺的初始渡越时间作为光纤陀螺本征频率τ的初始值,并依据初始渡越时间获取频率生成器的赋值的初始值。
作为本发明的进一步改进,光纤陀螺的初始渡越时间获取方式为:
离线状态下由逻辑处理器生成一定频率和幅值的斜波施加到集成光学相位调制器上,通过示波器测量相邻下脉冲尖峰时间获得初始渡越时间τ
依据初始渡越时间获取频率生成器的赋值的初始值包括:
根据初始渡越时间τ
作为本发明的进一步改进,调制信号在光纤陀螺的闭环控制回路传输过程包括:
调制信号经过数模转换和缓冲放大后施加到集成光学相位调制器,以实现对光纤敏感环的输入光信号进行相位调制,相位调制后的光信号经过光纤敏感环产生干涉光信号,干涉光信号被光电探测器接收后,再经过前置放大器放大和模数转换器采集后被逻辑处理器接收。
作为本发明的进一步改进,该方法还包括:
对于以2τ为一个周期的待解调信号,每
解调出的一个周期内角速度误差量D
D
解调出的一个周期内半波电压误差量D
D
解调出的一个周期内本征频率误差量D
D
为实现上述目的,按照本发明的另一个方面,提供了一种光纤陀螺本征频率的在线跟踪系统,该系统包括光纤陀螺、数模转换器、缓冲放大器、前置放大器放大、模数转换器和逻辑处理器,光纤陀螺包括依次连接的ASE光源、光纤耦合器、集成光学相位调制器和光线敏感环,光纤耦合器的反馈端依次通过光电探测器、前置放大器和模数转换器后输入至逻辑处理器的信号接收端,集成光学相位调制器的控制端依次通过缓冲放大器和数模转换器后连接至逻辑处理器的信号发送端,其中,
逻辑处理器用于获取的光纤陀螺本征频率τ和频率生成器的赋值,输入频率生成器的赋值以输出对应的闭环控制回路时钟,将闭环控制回路时钟发送至逻辑处理器;基于闭环控制回路时钟并依据光纤陀螺本征频率τ生成对应的不对称四态方波信号和锯齿波信号,将两个信号叠加得到调制信号,其中,不对称四态方波信号的周期为2τ,每个周期中相位浮动为±φ的持续时间为
作为本发明的进一步改进,光纤陀螺本征频率和频率生成器的赋值的初始值获取过程包括:获取光纤陀螺的初始渡越时间作为光纤陀螺本征频率τ的初始值,并依据初始渡越时间获取频率生成器的赋值的初始值。
作为本发明的进一步改进,光纤陀螺的初始渡越时间获取方式为:
离线状态下由逻辑处理器生成一定频率和幅值的斜波施加到集成光学相位调制器上,通过示波器测量相邻下脉冲尖峰时间获得初始渡越时间τ
依据初始渡越时间获取频率生成器的赋值的初始值包括:
根据初始渡越时间τ
作为本发明的进一步改进,逻辑处理器还用于:
对于以2τ为一个周期的待解调信号,每
解调出的一个周期内角速度误差量D
D
解调出的一个周期内半波电压误差量D
D
解调出的一个周期内本征频率误差量D
D
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
本发明提供的一种光纤陀螺本征频率的在线跟踪方法及系统,其通过构造四态方波和锯齿波叠加得到的调制信号,通过经光纤陀螺的闭环控制回路传输后得到的待解调信号,通过对光纤陀螺调制频率和实际频率的误差解调,并对光纤陀螺调制频率源时钟进行动态调整,从而实现对光纤陀螺本征频率的自动跟踪,不影响角速度闭环回路和半波电压闭环回路,对光纤陀螺角速度通道精度无影响。
本发明提供的一种光纤陀螺本征频率的在线跟踪方法及系统,通过增加DDS/DAC频率生成器,能够提供更高精度的跟踪,并且通过控制DDS/DAC频率生成器的频率更新时刻能够消除切换过程中带来的时钟抖动和闭环异常,减少了对逻辑处理器内部时钟资源的占用,解决高频率时钟更新产生的逻辑处理器温度上升和功耗增大问题,从而提高了光纤陀螺工作可靠性。
附图说明
图1是本发明实施例提供的光纤陀螺与逻辑处理器连接关系的示意图;
图2是本发明实施例提供的不对称四态方波信号的示意图;
图3是本发明实施例提供的锯齿波信号的示意图;
图4是本发明实施例提供的叠加后的调制信号的示意图;
图5是本发明实施例提供的本征频率误差值解调的示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
下面结合实施例和附图对本发明提供的城市轨道交通自愈供电方法及系统的工作原理进行详细说明。
一种光纤陀螺本征频率的在线跟踪方法,该方法包括:
获取的光纤陀螺本征频率和频率生成器的赋值,输入频率生成器的赋值以输出对应的闭环控制回路时钟,将闭环控制回路时钟发送至逻辑处理器,作为一个优选的方案,光纤陀螺本征频率和频率生成器的赋值的初始值获取过程包括:获取光纤陀螺的初始渡越时间作为光纤陀螺本征频率τ的初始值,并依据初始渡越时间获取频率生成器的赋值的初始值。例如,可以在离线状态下测量光纤陀螺初始渡越时间τ
图1是本发明实施例提供的光纤陀螺与逻辑处理器连接关系的示意图。如图1所示,作为一个示例,光纤陀螺包括依次连接的ASE光源、光纤耦合器、集成光学相位调制器和光线敏感环,其中,光纤耦合器的反馈端依次通过光电探测器、前置放大器和模数转换器后输入至逻辑处理器的信号接收端,集成光学相位调制器的控制端依次通过缓冲放大器和数模转换器后连接至逻辑处理器的信号发送端。
逻辑处理器基于闭环控制回路时钟并依据光纤陀螺本征频率τ生成对应的不对称四态方波信号和锯齿波信号,将不对称四态方波信号和锯齿波信号叠加得到对应的调制信号,其中,不对称四态方波信号的周期为2τ,每个周期中相位浮动±φ的持续时间为
具体地,初次迭代时,逻辑处理器对DDS/DAC频率生成器进行初始化时,发送频率生成器的初始赋值至DDS/DAC频率生成器生成初始输出时钟,逻辑处理器在更新频率生成赋值时,该时钟通过逻辑处理器第三输入端口引入逻辑处理器作为闭环控制回路时钟。在此基础上,逻辑处理器依据光纤陀螺本征频率τ生成上述的不对称四态方波信号和锯齿波信号。
图2、图3和图4分别为本发明实施例提供的不对称四态方波信号、锯齿波信号和叠加后的调制信号的示意图。如图2-4所示,以初次迭代为示例,根据光纤陀螺初始渡越时间τ
对应的调制信号经过光纤陀螺的闭环控制回路传输后,被逻辑处理器接收得到对应的待解调信号;作为一个示例,调制信号在光纤陀螺的闭环控制回路传输过程包括:调制信号经过数模转换和缓冲放大后施加到光学相位调制器上,以实现对光纤敏感环(Sagnac萨格纳克干涉仪)中光信号进行相位调制,相位调制后的光信号经过光纤敏感环产生干涉光信号,干涉光信号经过光电探测器接收,经过前置放大器放大和模数转换器采集后被逻辑处理器接收。
通过解调待解调信号获取本征频率误差值,解调过程包括:同一个周期内的第一个
图5为本发明实施例提供的本征频率误差值解调的示意图。如图5所示,作为一个示例,以2τ为一个周期的待解调信号为示例,每
其中,解调出的一个周期内角速度误差量:
D
解调出的一个周期内半波电压误差量:
D
解调出的一个周期内本征频率误差量:
D
在高精度光纤陀螺中四态方波调制已经进行了广泛的应用,能够进行角速度误差和半波电压误差的实时解算。但是仅采用四态方波调制并不能产生本征频率误差信息,无法对本征频率进行解调。采用锯齿波调制时,光波在进入光纤陀螺的光纤环和从光纤陀螺的光纤环出来两时刻调制相差τ时刻,若锯齿波周期等于τ,则两时刻光波调制相位相同,干涉光波产生的相位差为0;否则两时刻光波调制相位不同,干涉光波产生的相位差不为0,因此该干涉光波包含了本征频率误差,能够通过解调算法进行解算。所以,若要进行角速度、半波电压、本征频率这三种误差的解算,需要将四态调制和锯齿波调制相结合。为了避免叠加的锯齿波调制(相位较小)和四态调制(相位较大)出现较大的调制相位差别从而对采样信号造成干扰,采用了2:1不对称四态方波调制,并在前
光纤陀螺的闭环控制回路组成为:光纤环组件→光源组件→光电探测器→前置放大器→模数转换器(ADC)→逻辑处理器→数模转换器(DAC)→缓冲放大器→光纤环组件。作为一个优选的实施例,通过控制上述闭环控制回路的解调信号以分别解调得到角速度误差值、半波电压误差值和本征频率误差值,第一闭环回路,也称角速度闭环,逻辑处理器将每个周期内的角速度误差量D
利用本征频率误差值解调值更新频率生成器的赋值和获取的光纤陀螺本征频率,重复迭代上述步骤直至达到迭代终止条件,输出迭代终止时获取的光纤陀螺本征频率。优选的,迭代终止条件为达到预设的迭代次数或者当前本征频率误差值小于预设阈值,当然,以上迭代终止条件仅为一个示例,可以依据解调需求设置对应的迭代终止条件。
一种光纤陀螺本征频率的在线跟踪系统,系统包括光纤陀螺、数模转换器、缓冲放大器、前置放大器放大、模数转换器和逻辑处理器,光纤陀螺包括依次连接的ASE光源、光纤耦合器、集成光学相位调制器和光线敏感环,光纤耦合器的反馈端依次通过光电探测器、前置放大器和模数转换器后输入至逻辑处理器的信号接收端,集成光学相位调制器的控制端依次通过缓冲放大器和数模转换器后连接至逻辑处理器的信号发送端,其中,
逻辑处理器用于获取的光纤陀螺本征频率τ和频率生成器的赋值,输入频率生成器的赋值以输出对应的闭环控制回路时钟,将闭环控制回路时钟发送至逻辑处理器;基于闭环控制回路时钟并依据光纤陀螺本征频率τ生成对应的不对称四态方波信号和锯齿波信号,将两个信号叠加得到调制信号,其中,不对称四态方波信号的周期为2τ,每个周期中相位浮动±φ的持续时间为
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种光纤陀螺本征频率的在线跟踪方法及系统
- 一种光纤陀螺本征频率的跟踪方法