无人机燃油供油系统及供油、加油控制方法
文献发布时间:2023-06-19 10:46:31
技术领域
本发明属于无人机燃油供油设备技术领域,具体涉及一种无人机燃油供油系统及供油、加油控制方法。
背景技术
长航时无人机是一款大机动可回收无人机系统,具有隐身、高速(高亚音速到超音速)、大机动(稳定6G、瞬时9G)的优势,长航时无人机的布局特点是机身细长,载油量大,起飞、飞行过程中特别是在大机动飞行时容易产生由燃油晃动造成的重心剧烈变化,同时飞行包线飞行高度范围从0到12000米,随高度的压力变化剧烈,发动机供油端要求恒压供油。
保压供油现有技术所采用的设计方案均是采用从发动机引气增压,为此,供无人机使用的涡喷发动机都设计有发动机引气端口,即从发动机压气机后引出少量高压气流,输入油箱舱给油箱内或油箱外加压而油箱本身都是橡胶软油箱,但不论是加压于油箱外还是油箱内其压力(压强)必须是由飞机机体的硬壳承力结构所承受,由于涡喷发动机油耗较大,机上燃油载量很大,一般占到飞机起飞总重的25%到40%,占飞机机体容积的百分比也与之相当。就压力而言,50Kpa的压强是指在每平方厘米上作用有0.5公斤的力,对于油箱面积1平方米的飞机结构,所要承受的张力就是5000公斤。
现在从小型无人机到大型无人机基本都是采用复合材料结构,(不论是玻璃纤维、碳钎维还是其他复合材料)机体结构之间的连接大部分都是采用胶接,特别是飞机的机身蒙皮和机身框、粱之间的连接,而胶接结构的剥离强度是很低的,油箱舱中输入的压力正是产生这种破坏力极强的张力即剥离力;一旦结构连接之间出现剥离,就会使飞机结构强度急剧下降,严重时会使飞机解体。除了剥离破坏,这个压力还会使相关飞机外形板件鼓胀变形,破坏飞机空气动力学外形,飞机阻力增加,使飞机的飞行性能下降,为了保证飞机结构能够承受这个充气压力,结构设计时就必须把这种载荷也考虑进去,在原本飞机承受空气动力的载荷所需结构外再增加结构强度,即加大结构板件的厚度,增加胶接面,从而大大增加了飞机结构重量和材料以及增加了相关制造工艺的难度和制造成本。
另外,为了加压,机体结构还必须要密封,这个密封要承受飞行气动载荷的同时还要能承受充气的膨胀压力,并保证机体在各种受力条件下的变形(弯曲和扭转)都不能引起密闭舱漏气,一旦漏气,就无法向发动机供油,造成空中停车的严重事故;修复时也很难二次密封,对机体结构设计和制造工艺要求很高,同时也大大增加了成本。
发明内容
有鉴于此,本发明的主要目的在于提供一种无人机燃油供油系统及供油、加油控制方法。
为达到上述目的,本发明的技术方案是这样实现的:
本发明实施例提供一种无人机燃油供油系统,该系统包括油箱组、第一管路、第二管路、加油口、加压油泵、加压油箱、控制器、供油组件;
所述油箱组的一部分分别通过第一管路与加压油泵连接;
所述加压油泵通过第三管路与加压油箱连接;
所述油箱组的另一部分分别通过第二管路与加油口连接;
所述加压油箱通过供油组件与发动机连接;
所述加压油泵与第一管路之间设置四通接头,所述四通接头的一端经燃油顺序控制阀与第二管路连接;
所述控制器分别与加压油泵、供油组件、燃油顺序控制阀连接;所述控制器还与飞行控制计算机连接,接收加压指令,发送油压和流量值。
上述方案中,还包括球阀,所述第二管路还通过球阀与第三管路连接,用于在地面抽气或者加油时使用。
上述方案中,还包括压力监测组件,所述四通接头的另一端通过压力监测组件与加压油箱连接。
上述方案中,所述压力监测组件包括减压阀、压力检测器,所述减压阀设置在四通接头的一端和加压油箱之间的管路上形成泄压回路,所述压力检测器设置在减压阀上、或者减压阀与加压油箱之间的管路上、或者设置在与加压油箱直接相连的其他管路上,所述控制器与压力检测器连接。
上述方案中,所述油箱组包括前油箱、后油箱,所述前油箱、后油箱均由若干组真空分体式软油箱组成,所述前油箱的若干组真空分体式软油箱分别与第一管路连接,所述后油箱的若干组真空分体式软油箱分别与第二管路连接。
上述方案中,所述供油组件包括第四管路、油滤、流量计、总油路电磁阀、发动机主油泵,所述加压油箱通过供油组件与发动机连接,所述第四管路沿供油方向依次设置流量计、总油路电磁阀、发动机主油泵,所述油滤设置在流量计和加压油箱之间、或者流量计和总油路电磁阀之间,所述流量计与控制器连接,所述总油路电磁阀、发动机主油泵分别与发动机控制器连接。
本发明实施例还提供一种无人机燃油供油系统的供油控制方法,该方法为:在无人机前阶段飞行过程中,所述球阀默认处于关闭状态,所述控制器驱动所述加压油泵,关闭燃油顺序控制阀,所述油箱组的前油箱通过第一管路向加压油箱内供油,所述加压油箱内的燃油通过供油组件向发动机输送。
上述方案中,该方法还包括:在无人机后阶段飞行过程中,所述球阀默认处于关闭状态,所述控制器驱动所述加压油泵,打开燃油顺序控制阀,所述油箱组的后油箱通过第二管路、加压油泵向加压油箱内供油,所述加压油箱内的燃油通过供油组件向发动机输送。
上述方案中,所述压力监测组件的压力检测器采集加压油箱内的压力,所述控制器根据加压油箱内的压力情况确定是否加大或减小加压油箱内的压力。
本发明实施例还提供一种无人机燃油供油系统的加油控制方法,该方法为:在无人机抽气和加油过程中,手动打开球阀,所述控制器打开燃油顺序控制阀,加油设备通过加油口、第二管路向油箱组的后油箱进行抽气和加油,通过加油口、第二管路的前段经燃油顺序控制阀和四通接头至第一管路向油箱组的前油箱进行抽气和加油,通过加油口、球阀向加压油箱进行抽气和加油,直至所有油箱气抽干净和燃油加满。
与现有技术相比,本发明能够保证在0~20000m高度范围内,1~6g的使用过载情况下,供油系统能够保证具有25kpa~50kpa的相对压力(也可以是其他的压力范围),保证顺畅地向发动机供油。
附图说明
此处所说明的附图用来公开对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
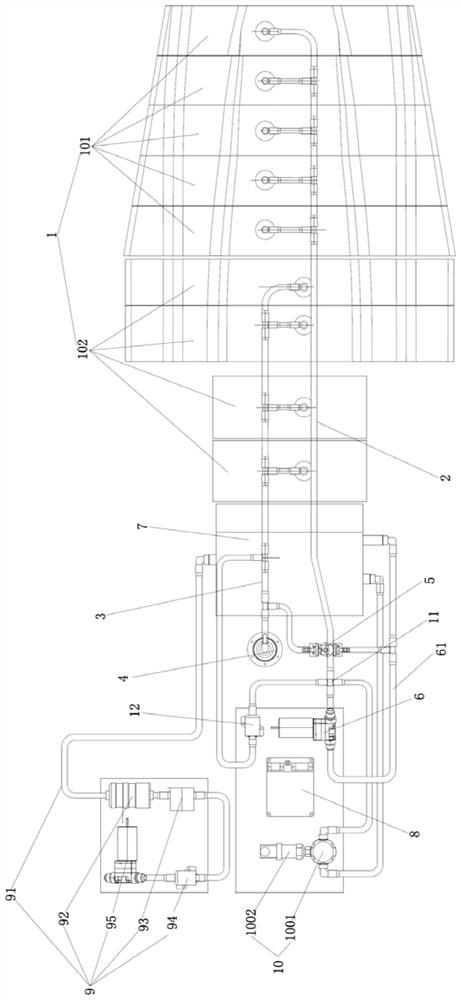
图1为本发明实施例提一种无人机燃油供油系统的结构示意图;
图2为本发明实施例提一种无人机燃油供油系统的供油控制方法的流程图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本发明实施例提一种无人机燃油供油系统,如图1所示,该系统包括油箱组1、第一管路2、第二管路3、加油口4、加压油泵6、加压油箱7、控制器8、供油组件9;
所述油箱组1的一部分分别通过第一管路2与加压油泵6连接;
所述加压油泵6通过第三管路61与加压油箱7连接;
所述油箱组1的另一部分分别通过第二管路3与加油口4连接;
所述加压油箱7通过供油组件9与发动机连接;
所述加压油泵6与第一管路2之间设置四通接头11,所述四通接头11的一端经燃油顺序控制阀12与第二管路3连接;
所述控制器8分别与加压油泵6、供油组件9、燃油顺序控制阀12连接;所述控制器8还与飞行控制计算机连接,接收加压指令,发送油压和流量值。
所述控制器8与加压油泵6连接用于调整其工作状态,所述控制器8与供油组件9连接用于采集燃油消耗量并依据耗油量控制燃油顺序控制阀12的开启时机,所述控制器8与压力检测组件10连接用于采集加压油箱内的压力,用这个压力来控制加压油泵的转速,所述控制器8与燃油顺序控制阀12连接用于控制他的打开与关闭。
进一步地,还包括压力监测组件10,所述加压油泵6与第一管路2之间设置四通接头11,所述四通接头11的一端通过压力监测组件10与加压油箱7连接。
所述压力监测组件10包括减压阀1001、压力检测器1002,所述减压阀1001设置在四通接头11的一端和加压油箱7之间的管路上形成泄压回路,所述压力检测器1002设置在减压阀1001上、或者减压阀1001与加压油箱7之间的管路上、或者设置在与加压油箱直接相连的其他管路上,所述控制器8与压力检测器1002连接。
所述压力检测器1002采用压力传感器即压力变送器,检测加压油箱7内的压力;可以安装在减压阀1001上,也可以安装在减压阀1001与加压油箱7之间的管路中,还可以安装在加压油泵6与加压油箱7之间的管路中,以及安装在油滤91与加压油箱7之间的管路中。
所述减压阀1001是一个机械减压阀,开启压力可按需要调整好,当加压油箱7中的压力超出设计值时,自动打开泄压。
当加压油箱7内压力超出设计值时,所述减压阀1001立刻导通,可以使加压油箱7内的燃油流回加压油泵6入口的管路中。
所述油箱组1包括前油箱101、后油箱102,所述前油箱101、后油箱102均由若干组真空分体式软油箱组成,所述前油箱101的若干组真空分体式软油箱分别与第一管路2连接,所述后油箱102的若干组真空分体式软油箱分别与第二管路3连接。
所述前油箱101、后油箱102采用真空分体式软油箱,能够全面抑制飞行过程中燃油晃动,抑制燃油晃动对无人机飞行重心的影响。
对前油箱101、后油箱102根据燃油顺序进行管理,以减小由于燃油消耗引起的全机重心变化。
所述供油组件9包括第四管路91、油滤92、流量计93、总油路电磁阀94、发动机主油泵95,所述加压油箱7通过供油组件9与发动机连接,所述第四管路91沿供油方向依次设置流量计93、总油路电磁阀94、发动机主油泵95,所述油滤92设置在流量计93和加压油箱7之间、或者流量计93和总油路电磁阀94之间,所述流量计93与控制器8连接,所述总油路电磁阀94、发动机主油泵95分别与发动机控制器连接。
根据发动机对供油系统的要求,在发动机不工作时,不能向发动机供油,发动机供油泵95不工作时不具有截止能力,一旦燃油大量流入未工作的发动机,将造成发动机无法启动;因此,在油源系统最末端设计了一只总油路电磁阀94,发动机启动时将供油油路打开,直到发动机停止工作后关闭。
所述流量计93计量流出的油量,提供总的耗油量,并为燃油顺序控制阀12的开启时机提供依据。
如图2所示,本发明实施例还提供一种无人机燃油供油系统的供油控制方法,该方法为:在无人机前阶段飞行过程中,所述球阀5默认处于关闭状态,所述控制器8驱动所述加压油泵6,关闭燃油顺序控制阀12,所述油箱组1的前油箱101通过第一管路2向加压油箱7内供油,所述加压油箱7内的燃油通过供油组件9向发动机输送;
在无人机后阶段飞行过程中,所述球阀5默认处于关闭状态,所述控制器8驱动所述加压油泵6,打开燃油顺序控制阀12,所述油箱组1的后油箱102通过第二管路3、加压油泵6向加压油箱7内供油,所述加压油箱7内的燃油通过供油组件9向发动机输送。
所述压力监测组件10的压力检测器1002采集加压油箱7内的压力,所述控制器8根据加压油箱7内的压力情况确定是否加大或减小加压油箱7内的压力。
所述加大或减小加压油箱7内的压力是通过加大或减小加压油泵6的流量来实现的。
一旦加压油箱7内的压力超出设计值,减压阀1001自动打开泄压。
所述本发明实施例的设计值为45-50Kpa,可以按需要设计为其他压力范围。
由于高速靶标起飞助推火箭脱落后使飞机的重心前移严重,巡航加力火箭工作后还会造成飞机重心前移,因此,本申请在飞机起飞后,首先使用重心之前的燃油,使飞机重心后移,弥补助推火箭造成的不利影响。
本发明实施例还提供一种无人机燃油供油系统的加油控制方法,该方法为:在无人机抽气和加油过程中,手动打开球阀5,所述控制器8打开燃油顺序控制阀12,加油设备通过加油口4、第二管路3向油箱组1的后油箱102进行抽气和加油,通过加油口4、第二管路3的前段经燃油顺序控制阀12和四通接头11至第一管路2向油箱组1的前油箱101进行抽气和加油,通过加油口4、球阀5向加压油箱7进行抽气和加油,直至所有油箱气抽干净和燃油加满。
本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、物品或者装置中还存在另外的相同要素。
以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
- 无人机燃油供油系统及供油、加油控制方法
- 发动机燃油瞬间汽化供油系统及控制方法