一种二自由度转动并联机构
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及空间机器人机构技术领域,具体的说是一种二自由度转动并联机构。
背景技术
并联机构是指通过两个或两个以上独立运动支链连接动平台及定平台,控制动平台运动的闭环机构,自上世纪八十年代以来,并联机构因其具有刚度高、承载能力大、累积误差小、动态特性好、结构紧凑等特点而得到广泛应用,如申请号为201610407036.0的中国专利公开了具有空间三自由度的并联机构,申请号为201821373632.2的中国专利公开了一种转动三自由度的并联机构。然而目前的少自由度并联机构仍存在结构复杂、设计控制困难,并联机构的运动学和动力学耦合性强,稳定性与承载能力有限等问题。
发明内容
为了解决现有技术中的不足,本发明提供一种二自由度转动并联机构,该并联机构能够解决现有的少自由度转动并联机构耦合性强、控制困难的问题,并提高并联机构的稳定性和承载能力。
为了实现上述目的,本发明采用的具体方案为:
一种二自由度转动并联机构,包括定平台、动平台、一条仅提供约束的恰约束支链以及两条提供驱动力的主动支链;
恰约束支链包括两个轴线相互垂直的第一转动副和第二转动副以及连接第一转动副和第二转动副的约束连杆,所述第一转动副与定平台连接,第二转动副与动平台相连;
两条主动支链包括用于控制动平台绕第一转动副转动的第一条主动支链以及用于控制动平台绕第二条转动副转动的第二条主动支链;
第一条主动支链包括自定平台起依次串联的第一平行四边形结构、第三连杆、第五转动副、第四连杆以及第三球副,第四连杆分别通过第五转动副和第三球副与第三连杆和约束连杆相连,第五转动副的转动轴线与第一转动副轴线相垂直;
第二条主动支链包括自定平台起依次串联的第二平行四边形结构、第七连杆、第八转动副、第八连杆和第六球副,第八连杆分别通过第八转动副和第六球副与第七连杆和动平台相连,第八转动副的转动轴线与第五转动副的转动轴线相垂直。
进一步地,所述的第一平行四边形结构由第三转动副、第四转动副、第一球副、第二球副、第一连杆和第二连杆构成,第一连杆分别通过第四转动副和第二球副与定平台和第三连杆相连,第二连杆分别通过第三转动副和第一球副与定平台和第三连杆相连;第三转动副、第四转动副的转动轴线垂直于第五转动副的转动轴线。
进一步地,所述的第二平行四边形结构由第六转动副、第七转动副、第四球副、第五球副、第五连杆和第六连杆构成,第五连杆分别通过第七转动副和第四球副与定平台和第七连杆相连,第六连杆分别通过第六转动副和第五球副与定平台和第七连杆相连,第六转动副、第七转动副的转动轴线与第三转动副的转动轴线相垂直。
进一步地,第一条主动支链中的第三转动副或第四转动副和第二条主动支链中的第六转动副或第七转动副均可选取为主动副。
进一步地,所述动平台的截面呈矩形。
有益效果:
1、本发明中的并联机构包括定平台、动平台、一条恰约束支链和两条主动支链(第一条主动支链和第二条主动支链),恰约束支链包括两个轴线相互垂直的第一转动副和第二转动副,两条主动支链均包括自定平台起依次串联的平行四边形结构、转动副和球副,各个平行四边形结构均包括两个轴线平行的转动副和两个球副,第一条主动支链能够控制动平台绕第一转动副转动,第二条主动支链能够控制动平台绕第二转动副转动,该并联机构的速度雅可比矩阵为对角阵,即动平台的一个输出运动仅由一个主动副的输入运动控制,解决了一般并联机构运动学和动力学耦合性强的弱点;同时,引入恰约束支链不仅可增强并联机构的整体稳定性和承载能力,还能提高并联机构的精度和控制不可控误差。
2、本发明中的并联机构的结构简单、灵活性高,控制简单,实用性强,有很好的推广利用价值。
下面结合实施例附图和具体实施例对本发明做进一步具体详细的说明。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
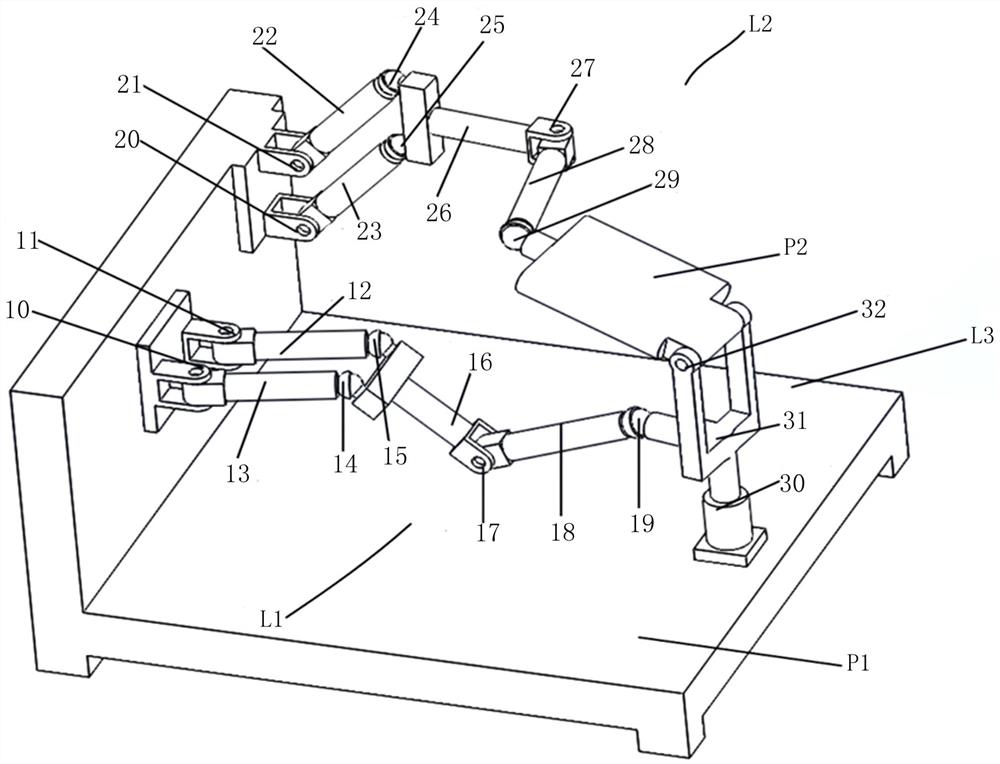
图1是本发明中并联机构的结构示意图。
图示标记:P1、定平台,P2、动平台;
L1、第一条主动支链,10、第三转动副,11、第四转动副、12、第一连杆,13、第二连杆,14、第一球副、15、第二球副,16、第三连杆,17、第五转动副,18、第四连杆,19、第三球副;
L2、第二条主动支链,20、第六转动副,21、第七转动副,22、第五连杆,23、第六连杆,24、第四球副,25、第五球副,26、第七连杆,27、第八转动副,28、第八连杆,29、第六球副;
L3、恰约束支链,30、第一转动副,31、约束连杆,32、第二转动副。
具体实施方式
下面将结合具体实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
本发明中所称的“第一”、“第二”并不是对相应技术特征在数量上的限定,而是为区分相关技术特征而作出的命名。
一种二自由度转动并联机构,请参考图1,该并联机构包括动平台P2、定平台P1、两条主动支链L1、L2和一条恰约束支链L3。
所述恰约束支链L3由第一转动副30、约束连杆31和第二转动副32组成。第一转动副30与定平台P1相连,第二转动副32与动平台P2相连,所述第一转动副30和第二转动副32的轴线相垂直。
两条主动支链包括用于控制动平台P2绕第一转动副30转动的第一条主动支链L1以及用于控制动平台P2绕第二转动副32转动的第二条主动支链L2。
第一条主动支链
第一条主动支链L1的两端分别与定平台P1和恰约束支链L3相连接,第一条主动支链L1包括自定平台P1起依次串联的第一平行四边形结构、第三连杆16、第五转动副17、第四连杆18以及第三球副19,第四连杆18分别通过第五转动副17和第三球副19与第三连杆16和约束连杆31相连,第五转动副17的转动轴线与第一转动副30轴线相垂直。
所述的第一平行四边形结构由第三转动副10、第四转动副11、第一球副14、第二球副15、第一连杆12和第二连杆13构成,第一连杆12分别通过第四转动副11和第二球副15与定平台P1和第三连杆16相连,第二连杆13分别通过第三转动副10和第一球副14与定平台P1和第三连杆16相连;第三转动副10、第四转动副11 的转动轴线垂直于第五转动副17的转动轴线。
需要说明的是,第一条主动支链L1中的第三转动副10或第四转动副11可选取为主动副。
第二条主动支链
第二条主动支链L2的两端分别与定平台P1的竖直部和动平台P2相连接,第二条主动支链L2包括自定平台P1起依次串联的第二平行四边形结构、第七连杆26、第八转动副27、第八连杆28和第六球副29,第八连杆28分别通过第八转动副27和第六球副29与第七连杆26和动平台P2相连,第八转动副27的转动轴线与第五转动副17的转动轴线相垂直。
所述的第二平行四边形结构由第六转动副20、第七转动副21、第四球副24、第五球副25、第五连杆22和第六连杆23构成,第五连杆22分别通过第七转动副21和第四球副24与定平台P1和第七连杆26相连,第六连杆23分别通过第六转动副20和第五球副25与定平台P1和第七连杆26相连,第六转动副20、第七转动副21的转动轴线与第三转动副10的转动轴线相垂直。
需要说明的是,第二条主动支链L2中的第六转动副20或第七转动副21均可选取为主动副。
详细地,所述动平台P2的截面呈矩形。
本发明中的并联机构其速度雅可比矩阵为对角阵,即动平台的一个输出运动仅由一个主动副的输入运动控制,解决了一般并联机构运动学和动力学耦合性强的弱点,并引入恰约束支链L3,能够提高并联机构的承载能力。
以上所述,仅是本发明的较佳实施例而已,并非随本发明作任何形式上的限制。凡根据本发明的实质所做的等效变换或修饰,都应该涵盖在本发明的保护范围之内。
- 一种存在两条连续转动轴线的二自由度转动并联机构
- 存在两条连续转动轴线的四支链二自由度转动并联机构