带传感器的电机和电机状态的检测方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及电机领域,尤其涉及一种带传感器的电机和电机状态的检测方法。
背景技术
对于电动车辆,例如HEV(混合动力车辆)和PHEV(插电式混合动力车辆),其使用的电机通常为永磁同步电机(简称为PMSM)。永磁同步电机通常使用空间矢量脉宽调制(简称为SVPMW)的方法进行控制,该控制方法需要精确掌握电机转子的位置信息。
一种可能的检测转子位置信息的方法是使用旋转变压器(resolver)或电涡流传感器或霍尔传感器作为位置传感器。这种类型的位置传感器的目标装置通常安装于转子支架,这对电机的平衡性带来了挑战。并且,目标装置在径向上和轴向上的安装精度对位置传感器的测量精度影响很大。此外,位置传感器的接收装置需要使用穿过电机壳体的导线向控制器传输信号,这种信号传输的方式容易受电磁干扰(例如来自电机本身或来自电机外部)的影响。
另外,电机工作过程中的温度也是电机控制中的一个重要因素,例如电机温度过高会带来转子退磁和绝缘材料老化失效等问题。现有的测量电机温度的方法例如有通过设置在定子内部的负温度系数热敏电阻(NTC)或正温度系数热敏电阻(PTC)测量定子的温度,而对于转子的温度,只能通过间接地构建模拟模型的方式进行估计。温度测量模型的校准成本高、耗时长;并且,测量模型受例如电机的制作材料、生产工艺以及使用环境等各种不确定性因素的影响,容易产生较大的偏差。
发明内容
本发明的目的在于克服或至少减轻上述现有技术存在的不足,提供一种方便对电机状态进行检测的带传感器的电机和电机状态的检测方法。
根据本发明的第一方面,提供一种带传感器的电机,包括转子、定子、转子传感器和传感器天线,其中,
所述转子传感器有多个,多个所述转子传感器在所述转子的周向上间隔开地安装于所述转子,所述转子传感器为声表面波传感器,
所述转子传感器能与所述传感器天线无线地通信,相邻的所述转子传感器的用于与所述传感器天线进行通信的通信频率段不相同,并且,所述声表面波传感器的通信频率能够随温度的变化而变化。
在至少一个实施方式中,相邻的所述转子传感器之间在所述周向上间隔相等的角度。
在至少一个实施方式中,所述转子传感器有N个,且N>3,
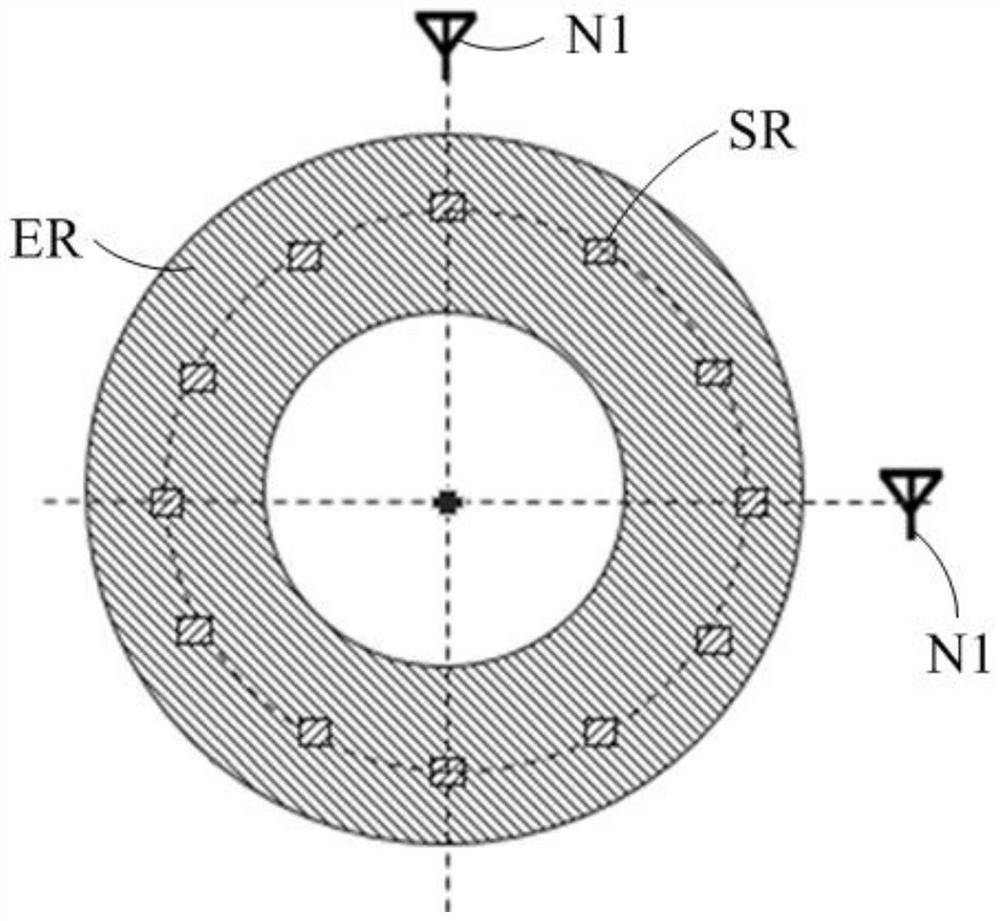
N个所述转子传感器分成M个组,且M 同一组的任意两个相邻的所述转子传感器不被属于另一组的所述转子传感器间隔开, 不同组的所述转子传感器的所述通信频率的频段至少部分地重合。 在至少一个实施方式中,所述电机还包括定子传感器,所述定子传感器安装于所述定子,所述定子传感器为无源无线的温度传感器。 在至少一个实施方式中,所述定子传感器为声表面波传感器,所述定子传感器能与所述传感器天线通信, 所述转子传感器和所述定子传感器的用于与所述传感器天线进行通信的通信频率段不相同。 在至少一个实施方式中,所述定子传感器为声表面波传感器且所述定子传感器有多个,多个所述定子传感器设置在所述定子的不同位置,多个所述定子传感器所使用的通信频率段不相同。 在至少一个实施方式中,所述转子传感器的通信频率和所述定子传感器的通信频率均不小于420MHz、且不大于450MHz。 在至少一个实施方式中,所述电机还包括系统天线,所述传感器天线与所述系统天线能通过无线的方式通信。 根据本发明的第二方面,提供一种电机状态的检测方法,其中,所述电机为根据本发明的电机,所述方法包括: 所述传感器天线在检测时刻获取作为目标传感器的一个或多个所述转子传感器的输出信号, 根据每个所述目标传感器的输出信号的通信频率,计算所述目标传感器在所述检测时刻的位置和所述目标传感器的温度。 根据本发明的第三方面,提供一种电机状态的检测方法,所述电机为根据本发明的电机,所述方法包括: 所述传感器天线在检测时刻获取定子传感器的输出信号, 根据所述定子传感器的输出信号,计算所述定子传感器的温度。 根据本发明的带传感器的电机结构紧凑、且能高效地测量至少电机转子的位置和温度。 根据本发明的电机状态的检测方法能以较高的精度、较低的成本至少同时检测电机转子的位置和温度。 附图说明 图1是根据本发明的一个实施方式的电机的部分结构的沿轴向的剖视图。 图2是根据本发明的一个实施方式的电机的部分结构的垂直于轴向的剖视图。 附图标记说明: ES定子;ER转子;SS定子传感器;SR转子传感器;N1传感器天线;N2系统天线;A轴向;R径向。 具体实施方式 下面参照附图描述本发明的示例性实施方式。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本发明,而不用于穷举本发明的所有可行的方式,也不用于限制本发明的范围。 参照图1和图2,介绍根据本发明的带传感器的电机和电机状态的检测方法。除非特别说明,参照图1,A表示电机的轴向,R表示电机的径向。 根据本发明的电机包括转子ER、定子ES、转子传感器SR、定子传感器SS、传感器天线N1和系统天线N2。 转子传感器SR和定子传感器SS可以均为能够测量温度的声表面波传感器(简称SAW)。声表面波传感器包括由压电型材料制作的基片和叉指式换能器(InterdigitalTransducers,简称IDT)。声表面波传感器具有无源无线的特点,即,传感器在测量和通信过程中不需要连接电池、也不需要使用导线。 转子传感器SR有多个(本实施方式中为12个),这多个转子传感器SR贴附于转子ER的一个轴向端面,且在转子ER的周向上,相邻的转子传感器SR之间的间隔角度相等(即在本实施方式中,相邻两个转子传感器SR之间间隔30°)。 转子传感器SR能在电机工作过程中以一定的频率输出信号,传感器天线N1获取转子传感器SR的输出信号,以实现转子传感器SR与传感器天线N1的通信。 在检测时刻t,通过获取某个转子传感器SR的输出信号而确定该转子传感器SR此时的位置信息。为了区分这些处于不同位置的转子传感器SR,可选地,每个转子传感器SR与传感器天线N1的通信频率段均不相同。 例如,对于本实施方式中的12个转子传感器SR,它们使用的通信频率段分别为420MHz至422MHz、422MHz至424MHz、424MHz至426MHz、426MHz至428MHz、428MHz至430MHz、430MHz至432MHz、432MHz至434MHz、434MHz至436MHz、436MHz至438MHz、438MHz至440MHz、440MHz至442MHz、442MHz至444MHz。可选地,为了将这12个转子传感器SR的通信频率明确地区分开,上述各频率段的至少起始数值或者至少末尾数值是取不到的。 应当理解,本发明对转子传感器SR的具体通信频率不作限制。然而优选地,为减少来自电机或外部环境的电磁干扰的影响,转子传感器SR使用的通信频率为在433MHz附近的民用的通信频率。例如,上述12个转子传感器SR的通信频率也可以是在420MHz至450MHz之间的、频段占据例如2MHz的其它不同频率段。 应当理解,本发明对转子传感器SR的数量不作限制,其例如可以根据电机的额定转速和控制精度要求进行设置。通常,电机的额定转速越高和/或控制精度要求越高,所需的转子传感器SR的数量越多。 在转子传感器SR的数量较多的情况下,也可以不为每个转子传感器SR安排一个特有的通信频率段,而可以为某几个转子传感器SR设置同样的通信频率段。为区分相邻的转子传感器SR,相邻的转子传感器SR的通信频率段不相同。 例如,将N个转子传感器SR分为M个组,这M个组的转子传感器SR的通信频段至少部分地重合。每个组的多个转子传感器SR在位置上是聚集的,即,同一组的任意两个相邻的转子传感器SR不被属于另一组的转子传感器SR间隔开。 通过设计合理的算法,可以将传感器天线N1所获取的连续的信号区分成来自M个组的信号,这M个组的信号周期性地重复出现,从而使用较少的通信频段而表征较多的位置信息。 具体地,对于图2中的12个转子传感器SR,例如将其分为2个组,位于12点钟方向、1点钟方向、2点钟方向、3点钟方向、4点钟方向和5点钟方向的6个转子传感器SR属于第一组,位于6点钟方向、7点钟方向、8点钟方向、9点钟方向、10点钟方向和11点钟方向的6个转子传感器SR属于第二组。12点钟方向的转子传感器SR与6点钟方向的转子传感器SR使用同样的通信频段,1点钟方向的转子传感器SR与7点钟方向的转子传感器SR使用同样的通信频段,2点钟方向的转子传感器SR与8点钟方向的转子传感器SR使用同样的通信频段,3点钟方向的转子传感器SR与9点钟方向的转子传感器SR使用同样的通信频段,4点钟方向的转子传感器SR与10点钟方向的转子传感器SR使用同样的通信频段,5点钟方向的转子传感器SR与11点钟方向的转子传感器SR使用同样的通信频段。算法例如可以根据时间序列,记录电机在某一次工作循环的初始位置,将从初始位置起传感器天线N1所获取的第一个信号所对应的转子传感器SR标记为第一组第一个位置传感器,将之后首次获取的、与第一组第一个位置传感器信号落入相同频段的信号所对应的转子传感器SR标记为第二组第一个位置传感器,从而区分出两组位置传感器。 可选地,多个转子传感器SR中的至少一个传感器可以具有与其它传感器的通信频段均不同的通信频段,这样,可以经由该传感器容易地确定转子的(绝对)位置(角度)。 可选地,传感器天线N1安装于电机壳体,并设置在距离转子传感器SR较近的区域。 优选地,在垂直于轴向A的截面的投影上,传感器天线N1位于多个转子传感器SR所在的圆上,以提高传感器天线N1与转子传感器SR的通信效率。 传感器天线N1可以只有一个,也可以有多个。 在传感器天线N1为一个的情况下,该传感器天线N1可以设置在转子ER的周向上的任意位置,并以该位置标记转子ER的零角度位置。 在传感器天线N1为多个的情况下,多个传感器天线N1可以在转子ER的周向上间隔均匀地设置。由此,每个转子传感器SR在360°的转动过程中将周期性地与多个传感器天线N1通信,多个传感器天线N1所获取的信号可以为算法的校准所用。 可选地,根据传感器天线N1的信号接收能力,在每一个检测时刻t,一个传感器天线N1可以只接收与该传感器天线N1最接近的一个转子传感器SR(将该传感器SR定义为目标传感器)的输出信号;一个传感器天线N1也可以同时接收与该传感器天线N1距离一定角度范围的多个转子传感器SR(将该多个传感器SR定义为目标传感器)的输出信号。 由于压电型材料制作的声表面波传感器的输出信号(包括信号的电压值和信号的频率)是该传感器(或者说该传感器所在位置处)的温度的函数,因此,在已知上述函数关系的基础上,转子传感器SR的输出信号还可以用于计算转子ER的不同位置的温度。 同样地,通过获取定子传感器SS的输出信号,也可以计算定子ES的不同位置的温度。 可选地,传感器天线N1还可以与定子传感器SS通信,以获取定子传感器SS的输出信号。定子传感器SS使用与转子传感器SR不同的通信频率段与传感器天线N1通信。优选地,定子传感器SS的通信频率不小于420MHz、且不大于450MHz。 应当理解,定子传感器SS的数量与设置位置可以根据定子的具体结构设置,将一定数量的定子传感器SS设置在定子的容易发热的位置。 应当理解,定子传感器SS与转子传感器SR也可以使用不同的天线。在每个定子传感器SS使用一个单独的天线进行信号传输的情况下,定子传感器SS也可以不限于是声表面波传感器、而是使用其它的无源无线的温度传感器,因为此时不需要通过频率信号来区分不同的定子传感器SS。 系统天线N2用于与传感器天线N1无线地通信,将传感器天线N1所获取的信号传递给控制器,控制器在对转子ER的位置和电机的温度进行计算后,给出控制策略。例如,在转子ER和/或定子ES的温度过高时,控制器输出降额信号给电机驱动系统的功率集成单元(简称PEU),使电机以降低功率的形式运转。 可选地,系统天线N2设置在电机的壳体的外部,例如,系统天线N2集成于控制器。 本发明至少具有以下优点中的一个优点: (i)本发明的电机结构紧凑,使用无源无线的声表面波传感器作为转子传感器SR取代例如旋转变压器或电涡流传感器或霍尔传感器,使得本发明中的传感器仅在径向R和轴向A上占据很小的空间,转子传感器SR在电机的径向R上的尺寸可以仅为2至5mm。 (ii)传感器天线N1与系统天线N2无线地通信,不需要使用穿过电机壳体的低压导线,降低了导线和接线端子的成本、免去了连接接口,使得电机的密封(防水)性能得到提高。 (iii)无源无线的转子传感器SR和定子传感器SS在安装完成后,不需要例如更换电池等的维护。 (iv)使用压电型材料制作的声表面波传感器作为转子传感器SR和定子传感器SS,可以根据传感器的输出信号计算传感器(或者说传感器所在位置处)的温度,以实时掌握电机的温度,为控制器的温度控制策略提供依据。并且,该传感器可以同时作为温度传感器和位置传感器,减少了传感器的数量。 (v)转子传感器SR和定子传感器SS均可以使用在433MHz附近的民用通信频率,以避免受到来自电机或外部的电磁干扰影响。 当然,本发明不限于上述实施方式,本领域技术人员在本发明的教导下可以对本发明的上述实施方式做出各种变型,而不脱离本发明的范围。
- 带传感器的电机和电机状态的检测方法
- 电机初始状态检测装置及电机初始状态检测方法