一种判断多伺服电机驱动一台设备各电机状态的方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及多伺服电机驱动一台设备领域。
背景技术
在工业生产中,需要多台伺服电机驱动同时一台设备进行工作,当一台伺服电机与设备之间发生打滑时,会造成该台电机输出转矩作用于设备上不一致,打滑的的电机转矩输出小,进而会造成伺服电机与设备之间的连接齿轮齿条损坏以及产品质量不合格。另外设备长期使用过程中由于齿轮齿条磨损,以及电机更换后导致的的运行特性不完全一致,没有及时对动态响应特性进行调整,最终导致设备损坏以及产品质量不合格。
发明内容
本发明所要解决的技术问题是:如何在多台伺服电机驱动同时一台设备时避免设备损坏以及产品质量不合格。
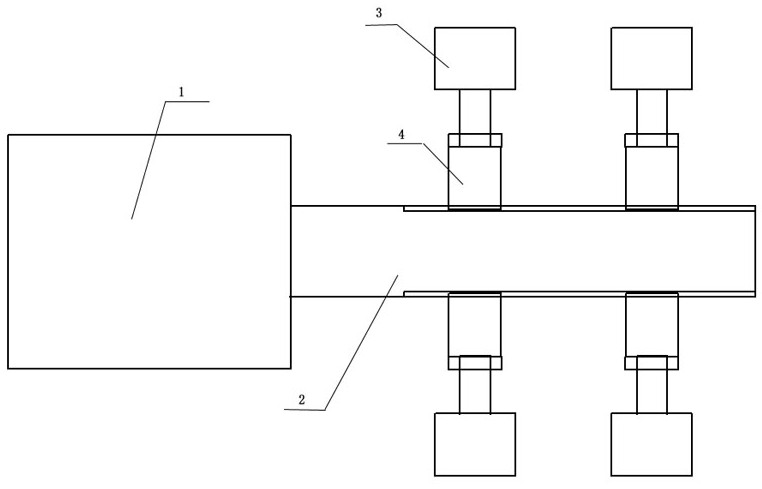
本发明所采用的技术方案是:一种判断多伺服电机驱动一台设备各电机状态的方法,其特征在于:多台伺服电机(3)分别通过一个胀紧联结套和直角齿轮传动箱(4)连接到设备(1)的传送轴(2)上,传送轴(2)在多台伺服电机(3)作用下做正反往复运动,按如下条件判断多伺服电机(3)是否需要报警停车
条件一、在传送轴(2)每个正向转动或者反向转动周期内,任意一个伺服电机(3)转过的角度与其它伺服电机(3)中任意一个伺服电机(3)的转过角度差与所有伺服电机(3)中转过角度最少的伺服电机(3)比如果大于等于95%且小于等于1则说明运行正常,否则说明运行不正常进行报警、停机;
条件二、任意一台伺服电机(3)电流值与其它伺服电机(3)中任意一台的电流值的差值除以所有伺服电机(3)中电流值最小或者最大的伺服电机(3)的电流值,如果大于等于0.5且小于等于0.3则说明运行正常,否则说明运行不正常进行报警、停机。
在每个伺服电机(3)上安装电动机编码器,每个电动机编码器连接PLC,PLC连接报警装置,PLC通过电动机编码器获得每个伺服电机的转速然后进行条件一和条件二的判断。
本发明的有益效果是:通过检测伺服电机编码器位置反馈偏差以及电流反馈偏差,设置一个门槛值,进行预警,实现判断多伺服电机驱动一台设备各电机状态来达到及时维护和调整。避免设备损坏,和产品质量不合格。
附图说明
图1是本发明的多伺服电机与设备连接示意图;
其中,设备,2、传送轴,3、伺服电机,4、胀紧联结套和直角齿轮传动箱。
具体实施方式
智能判断方法,将编码器的位置反馈和电流反馈通过通讯上传到PLC中,在PLC中安装判断程序,判断程序包括下述内容:
(1)电机位置检测滞后诊断:即两台电机位置反馈的时间Δt,设备正常工作时,电机在Δt时间内位置反馈值一致,电机反馈值的时间大于Δt时间,PLC报警提示;
Δt=t2-t1
Sˋt2- S t1<95% ( S t2- S t1)为故障
Sˋt2- S t1>100% ( S t2- S t1)为故障
t1 一台电机达到某一位置起始时间
t2 其它电机到达某一位置时间
S t1 位置初始值
S t2 位置最终值
Sˋt2 在t2时间位置值
程序:
A "M1.0" // 测试功能激活
A "M1.1" // 从0定位到L1的定位功能激活
L S5T#5S // Δt时间值
SD T 1
NOP 0
A T 1
= "M101.1" // 报警。
(2)偏离初始值报警:即主动电机的位置值,当从动电机位移回归初始位置偏离初始位置值,PLC报警;
程序:
L "PIW856"
ITD
DTR
T #rUltrasonic
L #rUltrasonic
T #rX
L 0.000000e+000
T #rXOG
L 2.768400e+004
T #rXUG
L 0.000000e+000
T #rYOG
L 8.500000e+002
T #rYUG
L #rYOG
L #rYUG
-R
T #rSw1 // (YOG-YUG)
L #rXOG
L #rXUG
-R
T #rSw2 // (XOG-XUG)
L #rSw1
L #rSw2
/R
T #rSw3 // (YOG-YUG)/(XOG-XUG)
L #rX // Input value
L #rXUG
-R // (X-XUG)
L #rSw3
*R // (X-XUG) * (YOG-YUG)/(XOG-XUG)
L #rYUG
+R // YUG + ((X-XUG) * (YOG-YUG)/(XOG-XUG))
T #rY_1 // Output value
T #Ry
A(
O(
L #Ry
L 5.000000e+000 // 原始位允许偏差
>R
)
O(
L #Ry
L -5.000000e+000 // 原始位允许偏差
) ) A M 2.1 // 测试功能激活 = M 101.2 // 报警。 (3)小于其它电机的电流:在运行过程中某一台电机电流小于其它电机电流50%或大于30%,PLC报警; 程序: O( L # Ry L MAX_IQ //最大电流槛值 >R ) O( L # Ry L MIN_IQ //最电流程槛值 ) = M101.6 //报警 (1)和(2)实质是对应角速度的变化是否满足条件。 本发明通过现场设备的动作状态,对电机位置和电流进行综合判断信息并记录,实现对电机运行状态的综合判断并及时提前预报,从而及早进行处理维护和调试。
- 一种判断多伺服电机驱动一台设备各电机状态的方法
- 检测控制电路、伺服电机驱动器、伺服电机及检测方法