泊车辅助装置、泊车辅助方法和程序
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种泊车辅助装置、泊车辅助方法和程序。
背景技术
提出有以下系统:当在泊车场使车辆泊车时,使用设置在本车辆上的摄像头等来检测泊车空间,使车辆向检测到的泊车空间自动泊车的系统。
在专利文献1中记载有以下泊车辅助装置:在存在多个可泊车区域的情况下,选择在进行泊车动作时或者下车时与障碍物接触的可能性小的、能更安全地泊车的区域。
在专利文献2中记载有以下泊车框识别装置:从通过安装于本车辆的拍摄部拍摄到的图像中检测本车辆能泊车的空间(泊车框)。该泊车框识别装置在检测到多个可泊车区域时,按易于泊车的顺序确定优先顺序,显示赋予了表示该优先顺序的信息的可泊车区域。
现有技术文献
专利文献
专利文献1:日本发明专利公开公报特开2019-137397号专利文献2:日本发明专利公开公报特开2016-16681号
发明内容
然而,在专利文献1、2的泊车辅助控制中,在检测到多个泊车框的情况下,会显示所有本车能泊车的框,因此显示的数量因驾驶员(用户)的不同,有时会感到众多而厌烦。
因此,本发明要解决的技术问题在于,当检测到多个可泊车位置时,以易于用户理解的方式来告知这些可泊车位置。
本发明的泊车辅助装置具有以下特征。
本发明是一种泊车辅助装置,该泊车辅助装置根据识别本车辆的外界的结果的识别信息来进行控制,使所述本车辆向目标泊车位置泊车,其特征在于,
具有可泊车位置检测部和目标泊车位置确定部,其中,
所述可泊车位置检测部根据所述识别信息来检测所述本车辆可泊车的可泊车位置;
在所述可泊车位置检测部检测到多个所述可泊车位置的情况下,所述目标泊车位置确定部根据所述本车辆的本车当前位置与各所述可泊车位置的距离,从检测到的所述可泊车位置中提取出规定数以下的候选泊车位置并显示在显示装置上,且从该显示出的所述候选泊车位置中选择所述目标泊车位置。
发明效果
根据本发明,当检测到多个可泊车位置时,能够以易于用户理解的方式来告知这些可泊车位置。
附图说明
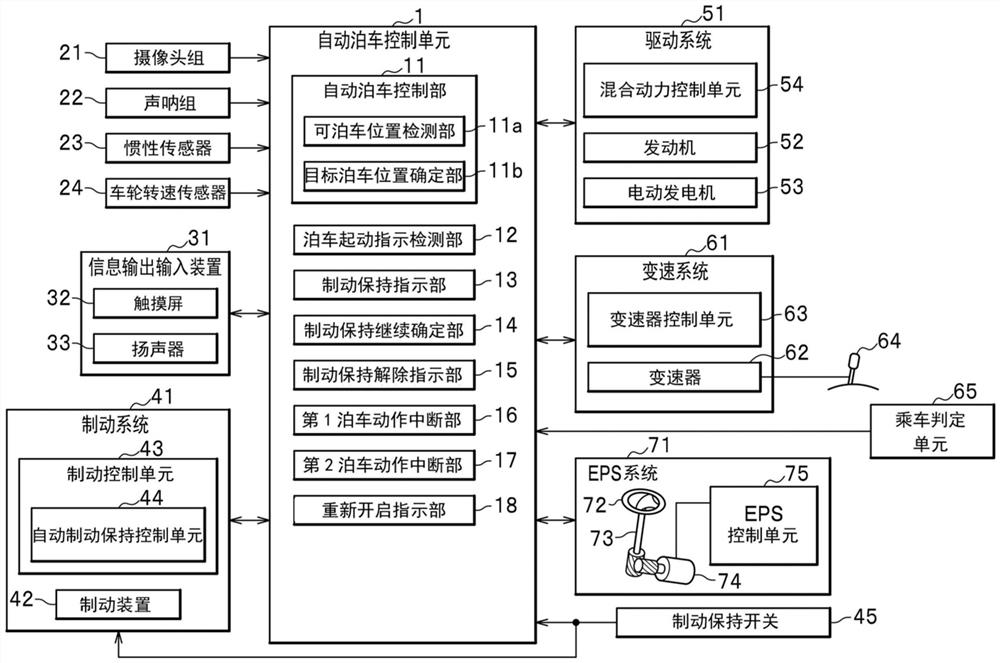
图1是表示以本发明一实施方式所涉及的自动泊车控制单元为中心的本实施方式的系统结构的框图。
图2是表示本发明一实施方式所涉及的本车辆的摄像头组和声呐组的搭载位置的俯视图。
图3是表示本发明一实施方式所涉及的本车辆的车厢前部构造的结构图。
图4是说明本发明一实施方式所涉及的本车辆进行的自动泊车的泊车场的俯视图。
图5是说明本发明一实施方式所涉及的本车辆进行的自动泊车的泊车场的俯视图。
图6是说明本发明一实施方式所涉及的本车辆进行的自动泊车的泊车场的俯视图。
图7是说明本发明一实施方式所涉及的自动泊车控制单元执行的自动泊车的概要的泊车场的俯视图。
图8是说明本发明一实施方式所涉及的自动泊车控制单元执行的自动泊车的处理的流程图。
图9是说明本发明一实施方式所涉及的自动泊车控制单元执行的自动泊车的处理的流程图。
图10是说明本发明一实施方式所涉及的搜索画面的显示处理的细节的流程图。
图11是一并显示本发明一实施方式所涉及的候选泊车位置的优先级的泊车场的俯视图。
图12是还一并显示与本发明一实施方式所涉及的候选泊车位置不相符的可泊车位置的泊车场的俯视图。
图13是本发明一实施方式所涉及的在左右两侧有泊车空间的泊车场的俯视图。
图14是本发明一实施方式所涉及的以平行泊车为基准的情况下的泊车场的俯视图。
图15是本发明一实施方式所涉及的以纵向停车为基准的情况下的泊车场的俯视图。
附图标记说明
1:自动泊车控制单元(泊车辅助装置);11:自动泊车控制部;11a:可泊车位置检测部;11b:目标泊车位置确定部;12:泊车起动指示检测部;13:制动保持指示部;14:制动保持继续确定部;15:制动保持解除指示部;16:第1泊车动作中断部;17:第2泊车动作中断部;18:重新开启指示部;21:摄像头组;22:声呐组;23:惯性传感器;24:车轮转速传感器;31:信息输出输入装置;32:触摸屏;33:扬声器;41:制动系统;42:制动装置;43:制动控制单元;44:自动制动保持控制单元;45:制动保持开关;51:驱动系统;52:发动机;53:电动发电机;54:混合动力控制单元;61:变速系统;62:变速器;63:变速器控制单元;64:换挡杆;65:乘车判定单元;71:EPS系统;72:方向盘;73:操舵轴;74:驱动电机;75:EPS控制单元;100:本车辆;203:其他车辆;301e:第1泊车空间(可泊车位置、状态300d下的候选泊车位置、目标泊车位置);302:第2泊车空间;303e:第3泊车空间(可泊车位置、状态300d下的候选泊车位置);304e:第4泊车空间(可泊车位置);305:第5泊车空间。
具体实施方式
下面,一边参照附图一边对本发明一实施方式进行说明。下面,前后左右的方向的说明按照图中的箭头的方向来进行。
图1是表示以自动泊车控制单元1为中心的本实施方式的系统结构的框图。
自动泊车控制单元1是自动泊车ECU(Electronic Control Unit:电子控制单元),是用于实施本发明的泊车辅助装置的控制器。自动泊车控制单元1以微型计算机为中心构成,通过根据其控制程序执行的处理来实现以下各种控制部的功能。即,自动泊车控制单元1执行自动泊车控制部11的功能。自动泊车控制部11还执行可泊车位置检测部11a和目标泊车位置确定部11b的功能。
另外,自动泊车控制单元1还执行泊车起动指示检测部12、制动保持指示部13、制动保持继续确定部14的功能。并且,自动泊车控制单元1还执行制动保持解除指示部15、第1泊车动作中断部16、第2泊车动作中断部17、重新开启指示部18的功能。在后面叙述这些各部所执行的处理的细节。
在自动泊车控制单元1上连接有摄像头组21和声呐组22。此外,与自动泊车控制单元1连接的各部(用线图显示被连接的情况)可以直接与自动泊车控制单元1连接,也可以经由CAN(Controller Area Network:控制器域网)与自动泊车控制单元1连接。
图2是表示本车辆100的摄像头组21和声呐组22的搭载位置的俯视图。
自动泊车控制单元1进行自动泊车的控制。因此,使用摄像头组21和声呐组22的识别信息(识别到本车辆100的外界的结果),来检测在泊车场等中用于进行泊车的空间。
摄像头组21是搭载于本车辆100的多台摄像头。即,本车辆100具有前方摄像头21F,该前方摄像头21F设置在本车辆100的前方,拍摄本车辆100的前方侧。另外,本车辆100具有后方摄像头21R,该后方摄像头21R设置在本车辆100的后方,拍摄本车辆100的后方侧。
并且,本车辆100具有侧方摄像头21RF,该侧方摄像头21RF设置在本车辆100的右侧部前方,拍摄本车辆100的右侧部。另外,本车辆100具有侧方摄像头21LF,该侧方摄像头21LF设置在本车辆100的左侧部前方,拍摄本车辆100的左侧部。另外,当侧方摄像头21RF、21LF被设置在后视镜的顶端部或者远离后视镜而设置时,由于该后视镜不会被较大地拍入该摄像头图像,因此是优选的。当然,也可以将侧方摄像头21RF、21LF远离后视镜一定程度地设置在其他位置。
声呐组22是搭载于本车辆100的多台声呐。即,本车辆100具有前方声呐22F,该前方声呐22F以大致等间隔的方式在本车辆100的前方排列有四台。四台前方声呐22F检测本车辆100前方的障碍物。另外,本车辆100具有后方声呐22R,该后方声呐22R以大致等间隔的方式在本车辆100的后方排列有四台。四台后方声呐22R检测本车辆100后方的障碍物。前方声呐22F和后方声呐22R分别检测前后行进方向上的障碍物。
各侧方声呐22RF、22LF、22RR、22LR检测可能卷入本车辆100的障碍物。虚线S表示各声呐能够检测到障碍物的空间范围。
本车辆100在右前方部侧方具有一台侧方声呐22RF,侧方声呐22RF从右前方部检测本车辆100的右侧方的障碍物。
本车辆100在左前方部侧方具有一台侧方声呐22LF,侧方声呐22LF从左前方部检测本车辆100的左侧方的障碍物。
本车辆100在右后方部侧方具有一台侧方声呐22RR,侧方声呐22RR从右后方部检测本车辆100的右侧方的障碍物。
本车辆100在左后方部侧方具有一台侧方声呐22LR,侧方声呐22LR从左后方部检测本车辆100的左侧方的障碍物。
以上各摄像头和各声呐的台数、设置位置不限于上述内容,也可以增减台数或者改变配置位置。但是,期望以摄像头、声呐均能尽可能地检测本车辆100整周的状况的方式来选择其台数和配置位置。另外,也可以通过摄像头、声呐以外的传感器来检测本车辆100的外部状况。
例如,设置于本车辆100的声呐组22是通过回波定位来检测周围的障碍物的一例,也可以代替声呐组22而使用其他物体检测机构。所谓其他物体检测机构例如是通过测量检测出相对于照射光的散射光所需的时间来检测物体的激光雷达(LIDAR:Light Detectionand Ranging:光探测和测距)。或者,作为其他物体检测机构,也可以使用通过向物体照射雷达波(激光、微波、毫米波、超声波等),并接收从该物体反射出的雷达波来检测物体的雷达。
返回图1,在自动泊车控制单元1上连接有惯性传感器23和车轮转速传感器24。惯性传感器23是检测本车辆100的加速度的传感器。车轮转速传感器24是检测本车辆100的各车轮的车轮转速的传感器。
另外,在自动泊车控制单元1上连接有信息输出输入装置31。信息输出输入装置31具有触摸屏32和扬声器33。信息输出输入装置31的主体配置在驾驶席附近,使得驾驶员能够操作触摸屏32等。信息输出输入装置31能够将各种信息显示在触摸屏32上,从扬声器33输出各种声音,并通过触摸屏32受理各种操作。
即,信息输出输入装置31能够将基于卫星定位系统等而制成的汽车导航信息显示于触摸屏32,并且能够从扬声器33输出声音。该信息可以包括从道路交通信息通信系统(VICS:Vehicle Information and Communication System)接收到的信息。
另外,信息输出输入装置31能够接收TV广播、无线电广播,将图像显示于触摸屏32,并且能够从扬声器33输出声音。并且,信息输出输入装置31具有光盘装置(未图示),能够重放CD(Compact Disc)、DVD(Digital Video(Versatile)Disk)、BD(Blu-ray Disc)等。另外,信息输出输入装置31具有HDD(Hard Disk Drive)(未图示),能够进行重放其所存储的音乐等声音。
此外,信息输出输入装置31能够进行来自本车辆100或本车辆100的搭载设备(自动收费系统(ETC:Electronic Toll Collection system)等)的各种消息的告知,另外,能够通过触摸屏32受理本车辆100或其搭载设备的各种操作。
在自动泊车控制单元1上连接有制动系统41。制动系统41是进行本车辆100的制动的系统。制动系统41具有进行本车辆100的制动的制动装置42和控制制动装置42的制动控制单元43。制动控制单元43具有自动制动保持控制单元44的功能。自动制动保持控制单元44是实现自动制动保持控制部的单元。制动装置42产生液压(油压)且向未图示的各车轮的制动轮缸供给液压,从而产生摩擦制动。
此外,制动系统41在本车辆100为混合动力车等的情况下,也可以并用再生制动(regenerative braking)。制动装置42例如是应用线控制动(brake by wire)系统的装置。因此,与是否对制动踏板(未图示)操作无关,均能够产生制动力。另外,还存在制动装置42搭载有电动制动助力器(electric brake booster)的系统的情况。在这种情况下,也与是否对制动踏板(未图示)操作无关,而均由电动制动助力器产生制动力。制动控制单元43是控制制动装置42的控制装置。
自动制动保持控制单元44是制动控制单元43所具有的功能单元,对自动制动保持功能进行控制,其中所述自动制动保持功能是指在驾驶员踩踏制动踏板(未图示)后,即使驾驶员将脚从制动踏板上移开也仍然能够保持制动状态。此外,在自动制动保持功能中,在存在对加速踏板(未图示)操作的情况下等、满足规定条件时解除自动制动保持状态。自动制动保持状态能够通过操作设置在本车辆100内的驾驶席附近的制动保持开关45来启动或者解除。
在自动泊车控制单元1上连接有驱动系统51。驱动系统51是使本车辆100行驶的系统。在该例子中,本车辆100是混合动力车,作为驱动源而具有发动机52和电动发电机(motor generator)53。混合动力控制单元54控制发动机52和电动发电机53来使本车辆100行驶。此外,本车辆100不限于混合动力车辆。例如,在为汽油车的情况下,仅将发动机52作为驱动源。另外,在为包含燃料电池车的电动汽车的情况下,仅将电机作为驱动源。
变速系统(transmission system)61是进行本车辆100的变速的系统。变速系统61具有进行本车辆100的变速的变速器(transmission)62、控制变速器62的变速器控制单元63、和与变速器62连接的换挡杆64。
变速器62可以是自动变速器,也可以是手动变速器。在本系统中,能够与驾驶员的操作无关而通过变速器控制单元63的控制由变速器62进行变速。在这种情况下,变速器控制单元63也可以根据该变速来改变换挡杆64的位置。
在自动泊车控制单元1上连接有乘车判定单元65。乘车判定单元65判定驾驶座上是否有驾驶员乘坐。
在自动泊车控制单元1上连接有EPS(Electric Power-Steering)系统71。EPS系统71是辅助驾驶员操舵的系统。EPS系统71具有设置有方向盘72的操舵轴73、驱动操舵轴73旋转的驱动电机74、和对驱动电机74进行控制的EPS控制单元75。EPS系统71以驱动电机74为驱动源使操舵轴73旋转,对驾驶员旋转方向盘72而进行操舵的操作进行辅助。
图3是表示本车辆100的车厢前部构造的结构图。
本车辆100的触摸屏32(图1)是具有向车厢内的乘员将各种信息显示在显示画面上的功能的显示装置,并且还兼作输入装置,当检测到显示画面中的触摸位置时,该输入装置将该检测到的触摸位置的信息输出给自动泊车控制单元1。
触摸屏32并没有特别地限定,例如由LCD(Liquid Crystal Display,液晶显示器)、有机EL(Electroluminescence,电致发光)等构成。触摸屏32的显示装置也可以由将所希望的图像向车窗玻璃38投影的HUD(Head Up Display,平视显示器)构成。
扬声器33(图1)具有输出语音的功能。扬声器33例如在车厢内的仪表板39、车门面板、后置物板(均未图示)等适宜的位置上设置有适宜的数量。
由触摸屏32构成的仪表板39包括:仪表盘32c,其隔着方向盘37设置在正对驾驶席的位置;多功能信息面板32b,其以正对驾驶席和副驾驶席的方式来设置,且在车宽方向上横向较长;右侧面板32d,其设置在车宽方向的驾驶席侧;和左侧面板32a,其设置在车宽方向的副驾驶席侧。另外,也可以将触摸屏32追加设置在正对后部座椅的位置(全部座椅的背面侧)。
在左侧面板32a上显示由设置在本车辆100的左侧的侧方摄像头21LF拍摄到的本车辆100左侧的后方及下方的图像信息。
在多功能信息面板32b上例如显示本车辆100周边的地图信息、地图上的本车辆100的当前位置信息、与本车辆100当前的行驶道路和预计路径有关的交通信息(包括信号信息)、与位于本车辆100周围的交通参与者(包括行人、自行车、摩托车、其他车辆等)有关的交通参与者信息、向交通参与者发出的消息等各种信息等。
在仪表盘32c上例如显示速度计、转速表、里程表、挡位信息、车灯类的亮灯状态信息等。
在右侧面板32d上显示由设置在本车辆100的右侧的侧方摄像头21RF拍摄到的本车辆100右侧的后方及下方的图像信息。
另外,用于处理自动泊车控制单元1的输入输出装置可以使用搭载于本车辆100的信息输出输入装置31(触摸屏32、扬声器33),也可以使用物理上与本车辆100分离的设备(智能手机等)。即,显示在车内的触摸屏32上的输出画面信号也可以从自动泊车控制单元1通过Bluetooth(蓝牙:注册商标)等无线通信输出给智能手机的触摸屏。
另外,作为用于处理自动泊车控制单元1的输入装置,可以使用车载的机械开关(拨盘型开关等),也可以使用定点设备。
并且,操作这些输入输出装置的用户并不限定于驾驶员,也可以是就座在副驾驶席等上的乘员、从本车辆100的外侧进行操作的人员。
图4~图6是用于说明由本车辆100进行的自动泊车的泊车场的俯视图。
在图4的状态下,本车辆100主要使用摄像头组21中的前方摄像头21F来在泊车场200中寻找用于进行泊车的空间。
当本车辆100进入泊车场200时,从本车辆100进行观察,在左右两侧排列有由白线201划分出的多个泊车空间202,既有已经被其他的其他车辆203泊车的泊车空间202,又有空闲的泊车空间202。通过驾驶员的驾驶使车辆沿箭头208的方向缓慢行驶。
通过前方摄像头21F的拍摄图像,本车辆100能够将区域211识别为用于本车辆100进行泊车的可利用的空间。通过对前方摄像头21F的拍摄图像进行规定的图像处理,能够识别亮度差。据此,本车辆100识别用于进行泊车的可利用的区域211。摄像头识别所擅长的方面在于识别白线201。摄像头识别还具有空间识别功能。摄像头识别所不擅长的方面在于雪、白墙、近前的其他车辆等。因此,仅通过前方摄像头21F的拍摄图像难以进行自动泊车所需的面对障碍物的制动控制。
在图5的状态下,本车辆100使用声呐组22的各声呐在泊车场200中寻找用于进行泊车的空间。
声呐能通过收发声波来检测障碍物,擅长摄像头所不擅长的近前的障碍物的检测。因此,为了准确地进行面对障碍物的制动控制而需要声呐。另外,由于声呐的空间识别功能也比摄像头高,因此,声呐组22有助于引导各种泊车模式。区域221表示用于进行由声呐组22识别的泊车的可利用的区域。
在图6的状态中,本车辆100通过并用前方摄像头21F(识别区域211)和声呐组22(识别区域221),将较大的空间识别为用于进行泊车的可利用的空间。通过该并用,还易于应对面对障碍物的制动控制。
本车辆100将泊车空间202a确定为自动泊车的空间。另外,从本车辆100进行观察,右侧纵深处有空闲的空间,将该位置确定为使本车辆100回轮(进退切换)的位置。因此,表示能够通过自动泊车控制使本车辆100前进然后将方向盘向右侧打轮,在回轮位置222使车暂时停止(箭头223),然后回轮以倒车的方式使本车辆100向泊车空间202a入库(箭头224)。
以上,通过图4~图6说明了自动泊车的概要。下面,参照图7,说明本实施方式的主要特征、即按照本车当前位置适宜地缩小泊车空间的显示内容的显示控制的概要。
图7是说明自动泊车控制单元1执行的自动泊车的概要的泊车场的俯视图。在该俯视图中,时间按状态300a、状态300b、状态300c、状态300d、状态300e、状态300f的顺序经过。
状态300a表示本车辆100到达泊车场之前。该泊车场从上方起依次有5台车辆相应的泊车空间,其中自上而下,第1泊车空间301e、第3泊车空间303e、第4泊车空间304e处于空位状态(符号的末尾“e”表示空位(empty))。另一方面,自上而下在第2泊车空间302、第5泊车空间305中已有其他车辆泊车。
另外,将第1泊车空间301e、第3泊车空间303e、第4泊车空间304e这样的处于空位状态的泊车空间作为“可泊车位置”。如由图4~图6说明的那样,可泊车位置检测部11a检测到1个以上的可泊车位置。
状态300b表示本车辆100已行进到作为泊车场的入口附近的本车当前位置306时的状态。此时,本车辆100的目标泊车位置确定部11b从状态300a中的3处可泊车位置,缩小到接近本车当前位置306的规定台数相应(在此2台相应)的可泊车位置(第3泊车空间303e、第4泊车空间304e),且通知给驾驶员。即,状态300b还是驾驶员参照的画面显示。
下面,将根据本车当前位置306选择的可泊车位置作为“候选泊车位置”。在此所谓的“候选”是指,本车辆100进行自动泊车的最终位置的候选。
状态300c表示状态300b的本车当前位置306比该当前位置略微向前方移动时的状态。另外,本车辆100的驾驶员通过操作加速踏板来使本车辆100低速前进。在此仍接近本车当前位置306的候选泊车位置为第3泊车空间303e、第4泊车空间304e。
状态300d表示状态300c的本车当前位置306比该当前位置略微向前方移动时的状态。在此,本车当前位置306远离第4泊车空间304e,靠近第1泊车空间301e。因此,目标泊车位置确定部11b通过排除候选泊车位置的第4泊车空间304e,而追加第1泊车空间301e,据此更新候选泊车位置的画面显示。
状态300e表示在状态300d的本车当前位置306上,驾驶员选择了目标泊车位置时的状态。假设驾驶员想要在第1泊车空间301e或第3泊车空间303e中的任一泊车空间泊车,而操作制动器使本车辆100停止在本车当前位置306。然后,驾驶员通过从状态300d的画面显示中触摸第1泊车空间301e,据此来选择目标泊车位置。通过该选择,目标泊车位置确定部11b使第1泊车空间301e变化为目标泊车位置显示301h。从该阶段起,本车辆100的制动保持被从驾驶员执行的手动切换为自动泊车控制部11执行的自动。
状态300f表示本车辆100通过自动驾驶自动泊车到目标泊车位置的状态(自动泊车完成)。本车辆100的本车当前位置306移动到在状态300e下选择的目标泊车位置显示301h的场所。另外,自动泊车如所述图6那样进行。
图8、图9是说明自动泊车控制单元1执行的自动泊车的处理的流程图。该图8和图9是表示将一系列的自动泊车的处理分割表示在多张附图上的图,两张附图之间的处理由端子1、2连接。
首先,驾驶员自己驾驶本车辆100如箭头208那样驶入泊车场200。此时,驾驶员操作触摸屏32等,在本车辆100已进入泊车场200的场所等进行自动泊车功能的工作指示(S1为是)。泊车起动指示检测部12受理该自动泊车功能的工作指示。于是,泊车起动指示检测部12将规定的自动泊车功能画面显示在触摸屏32上(S2)。另外,适宜显示一系列处理下的各种自动泊车功能画面。然后,如图7所示,自动泊车控制部11的可泊车位置检测部11a将本车当前位置的泊车空间的搜索画面显示在触摸屏32上(S3)。
图10是说明搜索画面的显示处理(S3)的细节的流程图。
作为S31,可泊车位置检测部11a通过图4~图6所示的方法,并用前方摄像头21F和声呐组22来检测可泊车位置。
作为S32,目标泊车位置确定部11b根据惯性传感器23和车轮转速传感器24的检测结果来推定本车当前位置。
作为S33,目标泊车位置确定部11b以由S32推定出的本车当前位置为基准,来计算用于向各可泊车位置泊车的本车辆100的移动距离。成为基准(成为移动距离的起始点)的本车当前位置例如是驾驶员视点(从驾驶席观察的驾驶员的视线位置)。移动距离也可以是本车当前位置与可泊车位置的直线距离。或者,目标泊车位置确定部11b也可以根据前方摄像头21F与声呐组22的检测结果,计算从本车当前位置起一边避让障碍物一边移动到可泊车位置的路径,且将该路径长度作为移动距离。
作为S34,目标泊车位置确定部11b将移动距离短的可泊车位置作为候选泊车位置。另外,响应于本车辆100的移动,本车当前位置和候选泊车位置时刻变化。
例如,目标泊车位置确定部11b也可以按接近本车当前位置的顺序,将规定台数相应(在图7中2台相应)的可泊车位置作为候选泊车位置。或者,目标泊车位置确定部11b也可以将移动距离在规定距离以下的可泊车位置且规定台数相应以下的(例如1台的)可泊车位置作为候选泊车位置。
作为S35,目标泊车位置确定部11b将由S34选择的各候选泊车位置与本车当前位置的位置关系画面显示在触摸屏32(图3的多功能信息面板32b)上。为了易于驾驶员理解,期望在图像中显示由框包围等标记来表示候选泊车位置。
返回图8,在S1为是以后,虽然驾驶员自己驾驶本车辆100在泊车场200内移动,但在此期间,反复进行搜索画面的显示处理(S3)(S4为否)。据此,即使本车辆100进行移动,也能够根据最新的本车当前位置来持续更新画面内容。
即,当按照本车辆100向行进方向行进的行进度而更新了本车当前位置时,可泊车位置检测部11a根据更新后的识别信息来检测新的可泊车位置。然后,目标泊车位置确定部11b根据更新后的本车当前位置与更新后的各可泊车位置的距离,提取出新的候选泊车位置,并用该提取出的候选泊车位置更新显示装置的显示内容。
设驾驶员操作制动踏板(未图示)(S4为是),使本车辆100停车。在此,通过本车辆100的乘员操作触摸屏32,在从S35的各候选泊车位置中选择1个目标泊车位置(S5为是)时,目标泊车位置确定部11b将目标泊车位置确定为该位置。
目标泊车位置的选择能够通过想要泊车的乘员触摸所决定的候选泊车位置的框所示的区域来选择。在没有选择目标泊车位置时(S5为否),使S3的处理继续。另外,S4和S5的处理顺序也可以相反,在此,设该处理顺序为在本车辆100停止之后选择目标泊车位置的顺序(S4→S5)。
目标泊车位置确定部11b根据在S5中选择的目标泊车位置与本车当前位置的位置关系,通过S33所示的方法等来计算从本车当前位置到目标泊车位置的路径,作为用于自动泊车的“目标移动路径”来使用。
然后,自动泊车控制部13指示自动制动保持控制单元44开启自动制动保持功能(S6)。自动制动保持控制单元44是实现自动制动保持控制部的控制单元。据此,即使驾驶员将脚从制动踏板(未图示)上移开也仍然自动保持本车辆100的制动状态。
在此之后,第2泊车动作中断部17通过计时器开始对经过时间(第1时间)进行计时(S7)。然后,自动泊车控制部11在触摸屏32上显示自动泊车的信息,另外,通过扬声器33以语音信息的方式进行告知(S8)。在这种情况下,可以仅将自动泊车的消息显示在触摸屏32上。在此,向驾驶员告知的消息是主旨为“已开启自动制动保持功能。为了开始自动泊车请按压制动保持开关,并将手从方向盘上移开,将脚从制动踏板上移开。”的内容。
当驾驶员执行了全部该消息时,按下制动保持开关45来解除制动保持开关45(的自动制动保持)(S9为是)。在该情况下按下制动保持开关45是操作解除指示操作部。当没有解除制动保持开关45(的自动制动保持)时(S9为否),将S8的消息持续显示在触摸屏32上。
此外,当在目前为止所说明的一系列处理(S2~S8)的过程中进行了规定操作时,自动泊车的一系列的处理中止。进行的规定操作例如为,驾驶员在触摸屏32上所显示的自动泊车功能画面中进行了中止自动泊车功能的动作的操作的情况、驾驶员有意地进行了换挡杆64的操作的情况等。
在解除了制动保持开关45(的自动制动保持)时(S9为是),执行S10的处理。即,制动保持解除指示部15指示自动制动保持控制单元44关闭自动制动保持功能(S10)。由此本车辆100的制动被解除。另外,制动保持继续确定部14将在S6中使自动制动保持功能工作的历史记录存储在非易失性存储器等中(S10)。并且,自动泊车控制部11开始自动泊车的动作(在后面叙述动作的内容)(S10)。而且,第2泊车动作中断部17通过计时器开始对经过时间(第2时间)进行计时(S10)。此外,在没有操作制动踏板(未图示)时,自动泊车控制部11进行以下控制。即,自动泊车控制部11即使解除了制动保持开关45(的自动制动保持)(S9),也不转移到自动泊车的动作(S10)。但是,即使在该情况下,自动制动保持功能(S6)本身也保持开启状态。
通过自动泊车控制部11开始的自动泊车的动作内容如下。即,自动泊车控制部11以使车辆按由S5确定的目标移动路径行驶的方式来进行控制。即,自动泊车控制部11控制制动系统41、驱动系统51、变速系统61和EPS系统71。据此,本车辆100通过倒车向成为目标泊车位置的泊车空间202a泊车。
即,自动泊车控制部11控制这些系统,如箭头223所示那样以D挡前进行驶,在回轮位置222暂时停止。接着,自动泊车控制部11以R挡倒车行驶,使本车辆100向作为目标泊车位置即泊车空间202a入库且使本车辆100停车。
另外,在开始自动泊车的动作之后(S10),判断在自动泊车的动作过程中是否有中断自动泊车功能的中断条件(图9的S11)。
即,在S11中,操作了方向盘72、换挡杆64被置于N挡等成为中断条件。
另外,在S11中,第2泊车动作中断部17判断在S7中开始计时的第1时间是否为规定时间以上。第1时间是从确定目标泊车位置(S5、S7)起到通过制动保持开关45受理自动制动保持的解除操作(S9为是)为止的时间。第1时间达到规定时间以上也是中断条件。并且,在S11中,第2泊车动作中断部17判断在S10中开始计时的第2时间是否在规定时间以上。第2时间是从制动保持开关45被操作开始(S9为是)到检测到解除制动踏板(未图示)的操作为止的时间。第2时间达到规定时间以上也是中断条件。
另外,通过乘车判定单元65的判定而判断为驾驶员不在驾驶席上也是中断条件。乘车判定单元65能够通过对驾驶员有无就座进行检测的就座传感器、拍摄车厢内的车载摄像头(通过图像处理能够判断驾驶员有无就座)、对驾驶席的车门有无打开进行检测的车门开度传感器等来实现。此外,能够将认为应当中断自动泊车功能的各种条件作为中断条件。
当不存在中断条件而结束自动泊车的动作时(S12为是),通过触摸屏32、扬声器33等告知已结束自动泊车的动作。然后,进入S13。当在自动泊车的动作中存在中断条件时(S12为否),进入S16。
在S13中,制动保持继续确定部14判断在S10中是否存储了自动制动保持的工作的历史记录。当存储有该历史记录时(S13为是),再次控制制动系统41来开启自动制动保持功能,并进入S15。因此,即使驾驶员没有踩踏制动踏板(未图示),本车辆100也被制动而停车。当没有存储该历史记录时(S13为否),进入S15。在这种情况下,自动制动保持功能保持关闭状态。在S10中没有存储自动制动保持的动作的历史记录的情况是以下事例。即,即使在S6中自动制动保持功能被开启,驾驶员也操作制动保持开关45而特意关闭该功能的情况。在S15中,自动泊车控制部11控制换挡杆64置于P挡,从而结束自动泊车。
另一方面,在S16中,由于存在自动泊车的中断条件(S11为是),因此中止自动泊车功能。然后,判断是否存在自动泊车功能的重新开启条件(S17)。作为重新开启条件,可以举出满足规定条件的重新开启条件。作为规定条件,是驾驶员由显示在触摸屏32上的自动泊车功能画面(省略图示)操作了重新开启按钮的条件,使其成为重新开启条件。另一方面,当由自动泊车功能画面操作了中止按钮时,选择了自动泊车功能的中止。
当存在重新开启条件时(S17为是),返回图8的S2,重新开启自动泊车功能。当在不存在重新开启条件的状态下经过了一定时间时(S17为否、且S18为是),确定自动泊车功能的中止(S19),一系列的处理结束。当在不存在重新开启条件的状态下没有经过一定时间时(S17为否、S18为否),返回S16。另外,当操作了自动泊车功能画面的中止按钮时,也可以无需等待经过一定时间(S18为是)而中止自动泊车功能。
另外,当符合所述中断条件时(S11为是),通过满足所述的重新开启条件(S17为是),能从S2起重新开启自动泊车功能。另一方面,当在自动泊车功能的一系列动作中满足中止条件时,中止自动泊车的处理本身,不进行处理的重新开启。当进行重新开启时,从S1开始重新进行处理。
另一方面,成为该“中断条件”的情况例如能够举出:在自动泊车功能的一系列动作中换挡杆64被置于P挡的情况;电动泊车制动器已动作的情况;操作触摸屏32等而进行了自动泊车功能的工作指示的情况等。此外,当在自动泊车功能的一系列动作中满足了停止条件时,虽然自动泊车功能的一系列动作停止,但在这种情况下,如果停止条件被解除,则从停止的时间点开始重新开启自动泊车功能的一系列动作。作为“停止条件”,可举出制动踏板(未图示)被操作的条件等。
以上,对基于自动泊车控制单元1进行的一系列自动泊车功能的控制内容进行了说明。另外,基本的泊车空间的搜索、目标路径计算、自动泊车的执行中的车辆控制等的进一步的详细内容,在所述的专利文献1、2中是公知的技术。
另外,不用说,本发明并不仅限定于所述实施方式的记载。例如,在所述的例子中,以通过从后侧入库来泊车的例子说明了自动泊车的动作,但也可以进行从本车辆100的前侧来入库的自动泊车。或者,也可以为驾驶员能选择从后侧入库还是从前侧入库。
并且,如图11~图15所示,也可以使用按照本车当前位置来适宜地缩小泊车空间的显示内容的搜索画面的显示处理(S3)的变形例。
图11是一并显示候选泊车位置的优先级的泊车场的俯视图。在该俯视图中,除了图7的显示内容以外,还显示如状态300b2的第3泊车空间303e“优先级=1”、第4泊车空间304e“优先级=2”那样的、按距离本车当前位置306由近至远的顺序分配的优先级的数值。
图12是还一并显示与候选泊车位置不相符的可泊车位置的泊车场的俯视图。在该俯视图中,除了图7的显示内容(候选泊车位置)以外,还显示从候选泊车位置排除的可泊车位置。另外,如状态300b3的第1泊车空间301e那样,被排除的可泊车位置的显示为了与候选泊车位置相区别,非强调地显示为虚线的框。
图13是表示在左右两侧有泊车空间的泊车场的俯视图。在该俯视图中,时间按状态310a、状态310b、状态310c的顺序经过。
在左侧的泊车空间,按由上自下的顺序,存在有空闲的第1泊车空间311e、使用中的第2泊车空间312、空闲的第3泊车空间313e、空闲的第4泊车空间314e、使用中的第5泊车空间315。
在右侧的泊车空间中,按由上自下的顺序,存在有空闲的第1泊车空间321e、空闲的第2泊车空间322e、使用中的第3泊车空间323、使用中的第4泊车空间324、空闲的第5泊车空间325e。
目标泊车位置确定部11b在左侧的泊车空间和右侧的泊车空间中分别(独立)地进行图7所示的最大2台相应的候选泊车位置的画面显示。即,能够显示2台(左侧的第1规定数)+2台(右侧的第2规定数)=最大4台相应的候选泊车位置。
另外,尽管能够显示4台,但例如在状态310b下,显示左侧的3台相应的可泊车位置中、接近本车当前位置316的2台相应的候选泊车位置(第3泊车空间313e、第4泊车空间314e)。另一方面,显示右侧的3台相应的可泊车位置中、接近本车当前位置316的1台相应的候选泊车位置(第5泊车空间325e)。
另外,在状态310c下,通过本车当前位置316向上侧前进,据此左侧的候选泊车位置发生改变(第4泊车空间314e被排除,追加第1泊车空间311e),且右侧的候选泊车位置也发生改变(第5泊车空间325e被排除,追加第1泊车空间321e、第2泊车空间322e)。即,在状态310c下,显示出4台相应的候选泊车位置。
这样,通过分别缩小在左侧和右侧显示的数量,能够易于理解地告知用户可泊车框。
以上参照到图13为止说明的泊车场是泊车空间预先用白线划分,沿白线指定了平行泊车的位置。因此,可泊车位置检测部11a能够检测到作为全部为一方向(横向)的框的可泊车位置。
另一方面,还存在对较大的空地没有指定白线等泊车规则的泊车场。另外,还存在部分没有白线的泊车场。在该情况下,可泊车位置检测部11a有时还检测到作为多个方向(横向、纵向)的框的多种模式的可泊车位置。因此,在图14、图15中,说明在针对没有指定这种泊车规则的泊车场检测到泊车方向彼此不同的多个所述可泊车位置的情况下,根据本车的位置使检测到的泊车方向彼此不同的可泊车位置分级显示,从而提出适宜的泊车空间的方式。
图14是以平行泊车为基准的情况下的泊车场的俯视图。在该俯视图中,时间按状态330a、状态330b、状态330c、状态330d、状态330e、状态330f的顺序经过。
状态330a表示本车辆100到达泊车场之前。在该泊车场中已有2台其他车辆331、332泊车,在这2台其他车辆331、332之间存在较大的泊车空间。因此,可泊车位置检测部11a检测到第1泊车空间333e、第2泊车空间335e、第3泊车空间334e这3个可泊车位置。另外,第2泊车空间335e是正交于其他车辆331、332的泊车方向的方向上的可泊车位置。
然后,随着本车当前位置336从泊车场的下侧向上侧行进,靠近本车当前位置336的候选泊车位置如以下那样变换。
·在状态330b下,仅将第3泊车空间334e显示为候选泊车位置。
·在状态330c下,将第3泊车空间334e、第2泊车空间335e显示为候选泊车位置。
·在状态330d下,将第1泊车空间333e、第2泊车空间335e显示为候选泊车位置。
·在状态330e下,驾驶员采用第1泊车空间333e作为目标泊车位置,而使成为目标泊车位置的显示333h。另外,在状态330c或状态330d下,成为候选泊车位置的2个泊车空间彼此存在重叠部分。例如,在状态330d下,在横向的第1泊车空间333e的右侧和纵向的第2泊车空间335e的上侧存在重叠部分。
如果在触摸重叠部分作为目标泊车位置的情况下,目标泊车位置确定部11b显示用于选择2个泊车空间中的任一个泊车空间的另一画面(省略图示),由此选择1个目标泊车位置。
·在状态330f下,通过自动泊车使本车当前位置336向第1泊车空间333e移动。
因此,目标泊车位置确定部11b按照泊车空间的方向使可泊车位置模式化(分组化),按不同的显示模式来显示各个模式。
·第1泊车空间333e、第3泊车空间334e均为横向的第1模式,通过用实线框强调显示的第1显示模式进行显示。
·第2泊车空间335e是纵向的第2模式,通过用虚线框非强调显示的第2显示模式进行显示。
另外,关于强调第1显示模式和第2显示模式中的哪一种模式,目标泊车位置确定部11b例如可以强调所属模式的可泊车位置较多一方的模式,也可以强调按照其他车辆331、332的泊车方向(在此为横向)的模式。
据此,本车辆100也易于仿照其他车辆331、332而选择平行泊车(第1模式),据此,即使在没有用白线指定明确的泊车规则的场所,也能够实现空间效率优异的泊车。
图15是以纵向停车为基准的情况下的泊车场的俯视图。在该俯视图中,时间按状态340a、状态340b、状态340c、状态340d、状态340e、状态340f的顺序经过。
状态340a表示本车辆100到达泊车场之前。该泊车场已有2台其他车辆341、342泊车,在这2台其他车辆341、342之间存在较大的泊车空间。因此,可泊车位置检测部11a检测到第1泊车空间344e、第2泊车空间343e、第3泊车空间345e这3个可泊车位置。另外,第1泊车空间344e和第3泊车空间345e是正交于其他车辆341、342的泊车方向的方向上的可泊车位置。
并且,随着本车当前位置346从泊车场的下侧向上侧行进,接近本车当前位置346的候选泊车位置如以下那样变换。
·在状态340b下,仅将第3泊车空间345e显示为候选泊车位置。
·在状态340c下,将第3泊车空间345e、第2泊车空间343e显示为候选泊车位置。
·在状态340d下,将第1泊车空间344e、第2泊车空间343e显示为候选泊车位置。
·在状态340e下采用第2泊车空间343e作为目标泊车位置,而使成为目标泊车位置的显示343h。
·在状态340f下,通过自动泊车,本车当前位置346向第2泊车空间343e移动。
在此,目标泊车位置确定部11b按照泊车空间的朝向,使可泊车位置的显示模式化(分组化)。
·第2泊车空间343e是纵向的第1模式,通过用实线框强调显示的第1显示模式来显示。
·第1泊车空间344e、第3泊车空间345e均为纵向的第2模式,通过用虚线框非强调显示的第2显示模式进行显示。
据此,本车辆100也易于仿照其他车辆341、342来选择纵向停车(第1模式),据此,即使在没有通过白线指定明确的泊车规则的位置,也能够实现空间效率优异的泊车。
- 泊车辅助装置、车辆、泊车辅助方法以及泊车辅助程序
- 泊车辅助装置、泊车辅助方法和程序